75% - 85% Current limit background?
-
@doctrucker said in 75% - 85% Current limit background?:
Is the 75-85% current setting limit a guide to avoid the stepper getting too hot for printed mounts?
It's a recommendation to avoid the motors getting very hot. This not only causes a problem when using printed mounts, but if the extruder motor heats up the extruder too much then it can affect the grip on the filament, especially when using an un-geared extruder. You can run them higher if you are happy with the motors getting hot.
-
@doctrucker said in 75% - 85% Current limit background?:
Sorry I was referring to the stepper motors.
I believe they can run happily at 80C which would seem very hot and too hot for printed mounts. Currently my Ormerod motors are barely warm. At 75%.
Ugh, yeah. Combined with the other topic about Duet 0.6 and Wanhai I made some wrong assumptions instead of carefully reading.
P3Steel Toolson mk2 - Duet 2 WiFi--> RatRig V-Core with Duet WiFi 1.03
Original Prusa i3 MK3S -
Fair point about the extruder. Personally I don't have much faith in direct extruders.
Would setting the current limit to 100% be safe, or would the average power consumption (and so heat build up) be too great due to the higher voltage?
If not known, if I measure the temperature of the exterior of the stepper is 80 the common limit or would 80 on the ecyerior leave the core far too hot?
-
@obeliks said in 75% - 85% Current limit background?:
@doctrucker said in 75% - 85% Current limit background?:
Ugh, yeah. Combined with the other topic about Duet 0.6 and Wanhai I made some wrong assumptions instead of carefully reading.No problem. 'stepper' is vague on my behalf and could have referred to either the thin that commands the stepping, or the thing that steps!

Did consider putting the question in the same post but thought thus would be more useful reference for people searching old posts.
-
Wes,
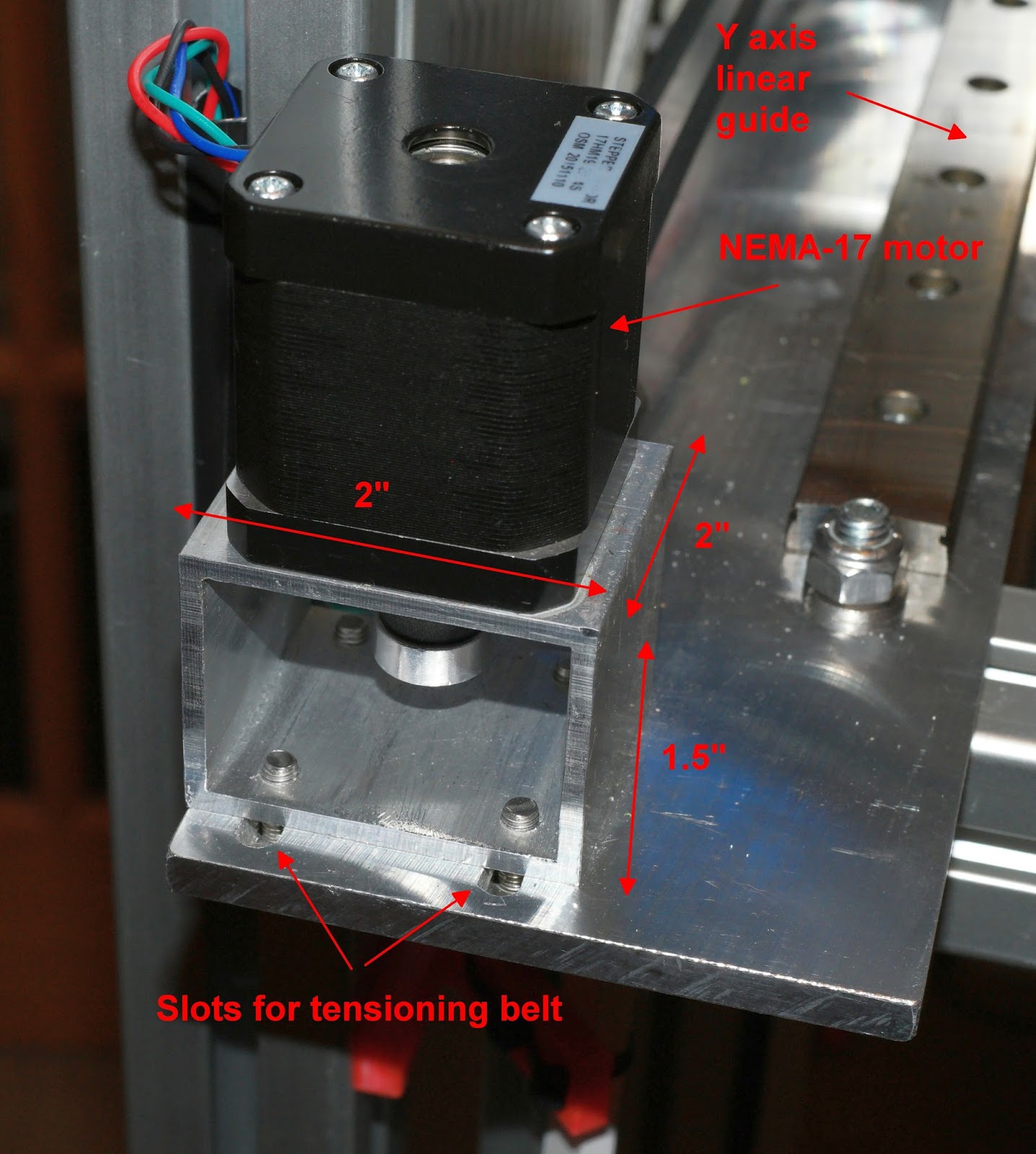
For info, I stuck thermistors to the outside of my XY stepper motors, low down near the mount. Then I fitted heat sinks and fans on top of the motors, and set the fans to run thermostatically starting at 40 deg C, ramping up to full speed at 50 deg C. The motors are rated at 2 Amps and I run them at 1700mA. In practice, I've never seen more than 46 deg C motor case temperature measured in that way. BUT, after 30 plus hours printing, even with PETG mounts, I still had some distortion caused by the belt tension on the motor shaft acting on the slightly softened plastic - and I don't run high belt tension either. (Hence my reason for giving up on plastic motor mounts).
-
IMO, 80C case would leave the wire turns inside way too hot. I run an extruder stepper at 100% (1.2A). Without any cooling it would get hot enough for me to be concerned but not hot enough to touch. (Yea, not scientific I know but I didn't measure) It is round so I put a cooling fin meant for RC motors around it with thermal tape between. It then ran around 40C on a long print measured with an HVAC probe type analog thermostat rubber banded to it. Printed a shroud to go around it with a 40mm fan wired in parallel with the hot end fan and it now runs not much above ambient temperature. With active cooling it could go above 100% but at what point the iron inside would magnetically saturate would be the question.
-
At work, we run most of our steppers at full current. As long as the outside of the motor does not go above 70°C, it is OK for the motor itself. We don't have 3D printed bracket, though
")
-
I've always been skeptical about using heatsinks on motors unless they cover all sides. Motors are steel which isn't a great thermal conductor. If you put a heatsink on one end you may cool that end, but I don't think it does much for the other end of the motor.
My corexy printer's XY stage has aluminum mounts bolted to large aluminum plates. The next time I catch one of the guys who has a thermal camera at the makerspace I'll see if I can make a couple thermal images of the XY motors after a print has been running for a while with the temperature stabilized. I'd like to see what the temperature gradient looks like across a motor that is heatsinked at one end.
My fingers tell me that the XY motors in my printer only get about 10-15C above ambient even after hours of printing. Maybe the one-end heatsinking is actually doing something. I mainly print ABS with the chamber temperature set to 50C. That heats the printer's frame up, which in turn may be transferring heat to the XY motors. I guess I'll have to make the thermal images after the printer runs for a while with the frame at room temp and after it heats up.
-
@mrehorstdmd said in 75% - 85% Current limit background?:
My corexy printer's XY stage has aluminum mounts bolted to large aluminum plates. The next time I catch one of the guys who has a thermal camera at the makerspace I'll see if I can make a couple thermal images of the XY motors after a print has been running for a while with the temperature stabilized. I'd like to see what the temperature gradient looks like across a motor that is heatsinked at one end.
I could snap a picture off my cnc router, it has steppers bolted to 12mm aluminium plates so that should provide ample heatsinking on one end only. But even with laminated steel I doubt there is any noticeable gradient.
-
Honestly, I see two completely different limits. On my WorkBee I have chosen the 3A NEMA23 steppers that Ooznest sells, and I have set the current to 2.4A. In this case, the 80% recommended limit is the same as the maximum current that the Duet 2 can provide. So, from my point of view:
- The electronics should be limited to provide the current that will guarantee it is not destroyed due to overheating;
- The 75-85% rule is more like a recommendation. For the same WorkBee I would have considered it anyway as the steppers are mechanically linked, for the screw driven version, only by 4 thin long threads. If the steppers would have been mechanically connected directly to the Al plates the heat would have been dissipated much quicker and thus the current could have been pushed to maximum. As @bearer mentioned, massive Al plates make quite a difference.
-
@catalin_ro said in 75% - 85% Current limit background?:
Honestly, I see two completely different limits. On my WorkBee I have chosen the 3A NEMA23 steppers that Ooznest sells, and I have set the current to 2.4A. In this case, the 80% recommended limit is the same as the maximum current that the Duet 2 can provide. So, from my point of view:
- The electronics should be limited to provide the current that will guarantee it is not destroyed due to overheating;
- The 75-85% rule is more like a recommendation. For the same WorkBee I would have considered it anyway as the steppers are mechanically linked, for the screw driven version, only by 4 thin long threads. If the steppers would have been mechanically connected directly to the Al plates the heat would have been dissipated much quicker and thus the current could have been pushed to maximum. As @bearer mentioned, massive Al plates make quite a difference.
Exactly so.
FWIW when the motors are moving, it should be OK to set the Duet to provide up to 1.414 times the rated motor current (subject to the 2.4A limit) This is because stepper motors are normally specified with the rated current passing through both windings simultaneously; whereas microstepping drivers only ever supply the peak current to one winding at a time.
-
Well that was a bigger gradient than expected. Central parts reached 65C while ends settled in at 61C afte an hour. The thermal interface to the frame is pretty poor, maybe the less than even paint job is responsible for that.
But I'd definitively heatsink the sides of the motor before the end. Might try doing a thermal timelapse for the next cutting job, could be interesting.

(Edit: cold spots on the motor sides is just paint chipped off, so emisitivity-or-whatnot gets all buggered.)
-
@bearer I have used my WorkBee for long hours, during rather hot summer weather, and never seen temperatures above 50°C, both for steppers and the air cooled HF spindle. And last summer had some really "pleasant" days in my area, with temperatures around 35°C for days at a time, in the shadow, and really scorching Sun.
The WorkBee has 6mm Al plates, hard anodized, and the steppers are "dangling" on 4cm long screws, with proper spacers, so the only cooling is provided by the natural air flow around them. Either not all steppers are equal or there is some other problem with your setup! Ooznest and OpenBuilds supply MT-2315HS300AW from Motech (http://www.motechmotor.com/productDetail-0105-30.html) for highest torque solution, with different end connector solutions. The motor is rated for 3A, 1.2Ohm/phase, 4.0mH/phase, 2.4Nm, and it is probably the maximum possible for Duet 2 (I couldn't find any alternative with higher torque).
-
They really ought not have any issues operating at that temperature, datasheet said good for 130C at 50C ambient. Don't recall the specs, stickers are long faded, but I believe 2.4A Sanyo something something, they might be run at a little more than 2.4A , wanted some extra ooompfh to try slotting/broaching with non rotating tool.
But as David point out, 2.4A rating is for both coils at the same time, so well within operating parameters I would say, even if closer to "150%" of the rated value. Sure, could drop the current for regular use, but Gecko G540 has soldered current limit resistors, its a hassle and it gets little use anyway,
And in this particluar instance, the increased temperature difference just paints a clearer picture. Front of motor is cooler than the rear, but the central part where the coils are is pretty uniform.