Unsolved GRR X400
-
Hi there,
my name is Jens, I am from Germany and I am running a German RepRap X400 3D printer from year 2013.
Before purchasing a Duet3D controller I would like to know if someone allready has done a version for the X400. I have upgrated this printer with an E3D Hemera extruder and I am thinking about also upgrating the controls.
My X400 is actually running with Arduino Mega 2560 and RAMPS 1.4, it has a single NEMA17 for x and z axis, but 2 counterwise rotating NEMA17 for the y axis. Further on an SD card reader and a Hitachi LCD display. Especially the Y axis causes problems with vibrations, depending on stepper motor driver, steps, etc. So it seems to be an electrical problem and not a mechanical problem (sorry I am just a mechanical engineer, not knowing too much about electronics).
If upgrating to the Duet, two separate stepper drivers for the y axis is a must have.
I am looking forward for any hints or experiences!
Thank you!Jens
-
Even if someone else hasn't done the conversion, you should still be able to get it working. It's just a matter of making the right connections and then informing the firmware of what you have connected.
These pages may help you along
https://duet3d.dozuki.com/Wiki/Going_from_Marlin_on_Arduino_to_RepRapFirmware_on_Duet
https://duet3d.dozuki.com/Wiki/FirmwareDifferencesAnd here is an example conversion done on an Ender 3.
https://duet3d.dozuki.com/Guide/Ender+3+Pro+and+Duet+Maestro+Guide+Part+1:+Wiring/37
For getting the right configuration, you can use the web tool to get started. https://configtool.reprapfirmware.org/Start
-
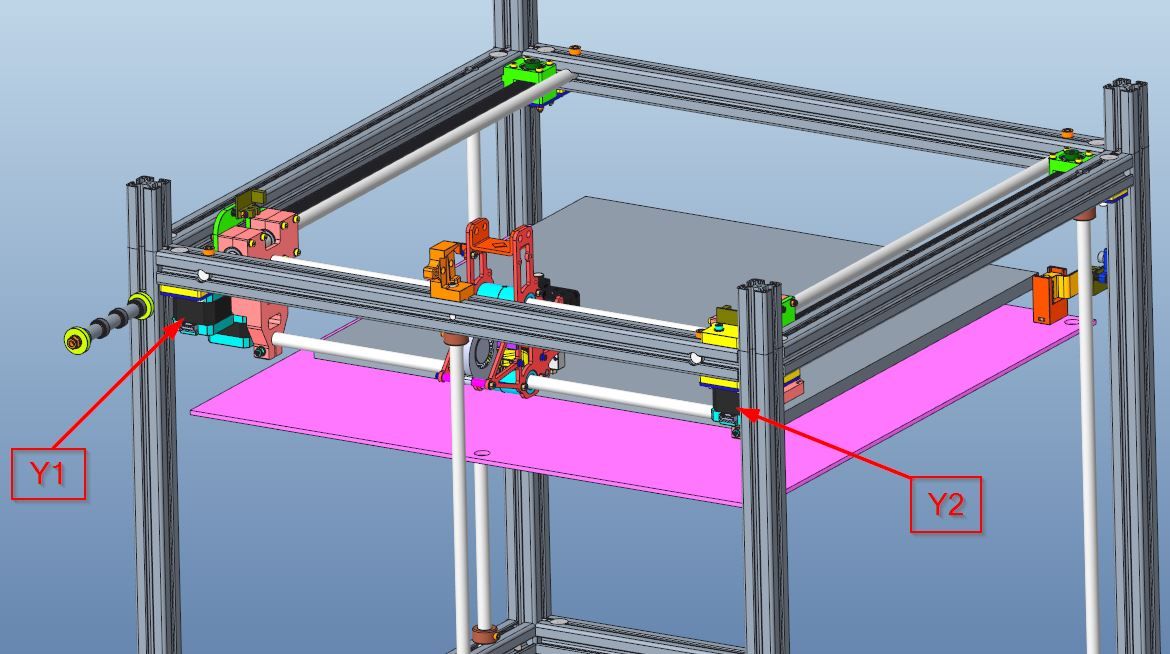
Thanks for all information, Phaedrux. From reading all of this, a Duet Maestro would fullfill my demands. I also tried to create a configuration with the web tool, but there is just one Y axis driver available. Could be the "E1" driver output configured to a second Y axis driver? This is one of the most important things I want to do with the new controll, the X400 has 2 motors for the Y axis. See attached image!
And no, I do not want to use the z driver output to connect the 2 motors to one stepper driver.
-
Could be the "E1" driver output configured to a second Y axis driver?
Yes, you will need to change that manually afterwards though by editing M584 in config.g. You'll add the driver # you want to use (E1) to the Y axis.
See here:
https://duet3d.dozuki.com/Wiki/Gcode#Section_M584_Set_drive_mapping