Single Z-Motor doesn't move
-
Hi,
I have a stepper motor connect to Drive 2, together with two jumpers at the ZB position. However, the motor doesn't rotate when I give a commant via the webControl. The tool position and speed in the webControl dashboard do change. I also have connected the motor to the drive 4 (M584 X0 Y1 Z4 E3 in config file below) and than it does work. The same type stepper motors connected to X and Y work fine as well. The Z-motor is not connected to a spindle yet, so the load is zero.
I have checked the resistance over the ZB jumpers, which is non.
Anyone an idea what could be wrong?
The config file is as follow:
; Configuration file for Duet WiFi (firmware version 2.03) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v2.1.4 on Sat Dec 14 2019 22:55:43 GMT+0100 (Midden-Europese standaardtijd) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"My Printer" ; set printer name ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X800.00 Y800.00 Z800.00 E800.00 ; set steps per mm M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X1700 Y1700 Z1700 E1700 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X380 Y330 Z230 S0 ; set axis maxima ; Endstops M574 X0 Y0 Z0 S0 ; set active low and disabled endstops ; Z-Probe M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed M557 X20:360 Y20:310 S10 ; define mesh grid ; Heaters M305 P0 T100000 B4138 R4700 ; set thermistor + ADC parameters for heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M305 P1 T100000 B4138 R4700 ; set thermistor + ADC parameters for heater 1 M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M106 P0 S0 I0 F500 H-1 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off M106 P1 S1 I0 F500 H1 T45 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on M106 P2 S0 I0 F500 H-1 ; set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned off ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not definedM122:
M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 2.05 running on Duet WiFi 1.02 or later Board ID: Used output buffers: 3 of 24 (9 max) === RTOS === Static ram: 25712 Dynamic ram: 93140 of which 0 recycled Exception stack ram used: 400 Never used ram: 11820 Tasks: NETWORK(ready,628) HEAT(blocked,1232) MAIN(running,3728) IDLE(ready,160) Owned mutexes: === Platform === Last reset 00:17:31 ago, cause: power up Last software reset at 2020-11-13 19:01, reason: User, spinning module GCodes, available RAM 11820 bytes (slot 3) Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d Error status: 0 Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest block write time: 9.1ms, max retries 0 MCU temperature: min 28.9, current 39.0, max 39.3 Supply voltage: min 24.1, current 24.2, max 24.4, under voltage events: 0, over voltage events: 0, power good: yes Driver 0: standstill, SG min/max 0/273 Driver 1: standstill, SG min/max 0/288 Driver 2: ok, SG min/max 0/0 Driver 3: standstill, SG min/max 0/294 Driver 4: standstill, SG min/max not available Date/time: 2020-11-13 20:38:57 Cache data hit count 3235876887 Slowest loop: 12.37ms; fastest: 0.06ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Move === Hiccups: 0, FreeDm: 160, MinFreeDm: 158, MaxWait: 801828ms Bed compensation in use: none, comp offset 0.000 === DDARing === Scheduled moves: 19, completed moves: 19, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 === GCodes === Segments left: 0 Stack records: 1 allocated, 0 in use Movement lock held by null http is idle in state(s) 0 telnet is idle in state(s) 0 file is idle in state(s) 0 serial is idle in state(s) 0 aux is idle in state(s) 0 daemon is idle in state(s) 0 queue is idle in state(s) 0 autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 29.61ms; fastest: 0.00ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8Board: Duet WiFi 1.02 or later (duetwifi102)
Firmware: RepRapFirmware for Duet 2 WiFi/Ethernet 2.05 (2019-12-13b1)
Duet WiFi Server Version: 1.23 -
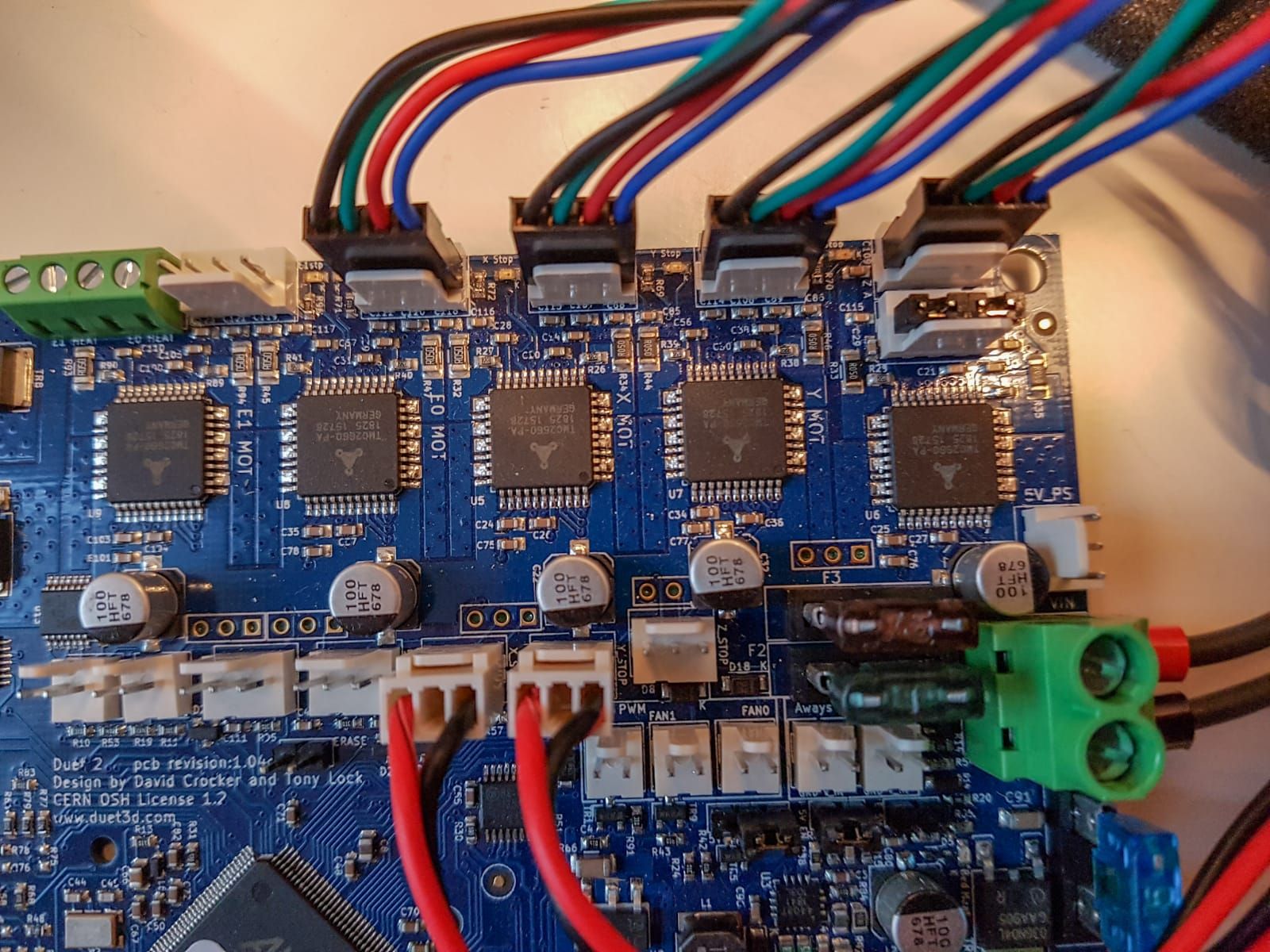
Can you post a photo of how you have it wired?
Do you get any error messages in the console when trying to move it?
-
There are no error messages in the console, the dashboard just shows the movement.
Wiring: 4 stepper motors and 2 limit switches (X and Y)
-
@Eisbar have you tried moving a known working motor (either X or y) to z to rule out a motor/wiring issue?
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@Eisbar this here looks very strange for me:

at the Z driver right upper corner of the driver chip, can you make zoomed image please?As if the resistor is displaced.
-
Hope you can see it better on the picture below.

-
@jay_s_uk Yes I tried this as well. Than the motor also doesn't work, however all motors work fine at the other locations/drivers.
-
@Eisbar this looks ok, it was a matter of perspective.
-
@Eisbar please check the backside also, that the elements are soldered correctly, especially the connector socket of Z.
-
If you unplug the motor (while powered off) and then power up and try to move the motor does it give an error?
When and where was the Duet purchased?
-
@Phaedrux there is no error with the motor unplugged, should there be one? It behaves the same as with the motor plugged in, so it shows 'movements' in the dashboard.
It was bought 12-2019 at ReprapWorld.
-
Can you send M98 P"config.g" ?
-
@Phaedrux said in Single Z-Motor doesn't move:
M98 P"config.g"
It shows:
M98 P"config.g" HTTP is enabled on port 80 FTP is disabled TELNET is disabled -
@JoergS5 the connections seem okay, however I don't known how it should look like:


-
@Eisbar this looks perfect, I could not solder better myself
")
This is not the reason. -
@Eisbar said in Single Z-Motor doesn't move:
It was bought 12-2019 at ReprapWorld.
Unfortunately well out of warranty.
Based on your description and the testing done it does seem like the Z driver has failed.
You can use the E1 driver for Z by remapping if it's free.
-
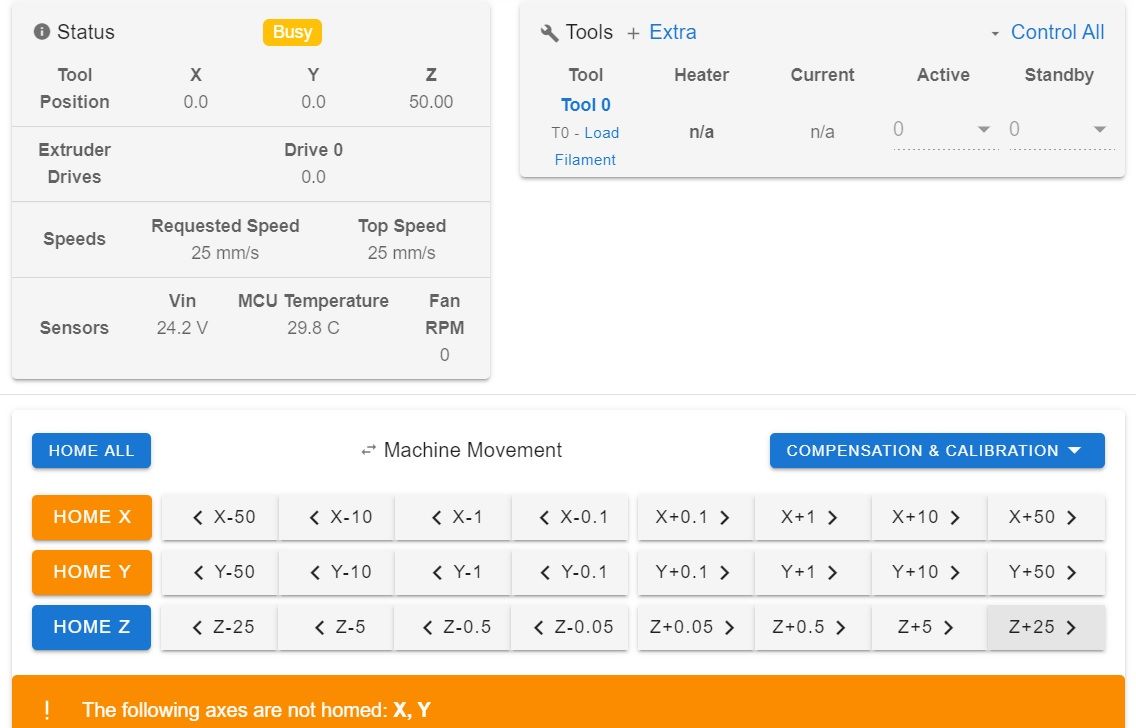
@Eisbar I saw that Z is immediately homed, I wonder how the Z position can be 50.
Can you please check
G91 G1 H2 Z100
whether the stepper rotates?
And then M122 and check the line for driver 2.Edit: I see you say tool position changes, but stepper doesn't move. So probably a wrong idea from me. But maybe you try anyway.
BTW I wonder why your console says Z endstop is triggered, but in your config you disabled endstops. The G1 H2 command above ignores the endstop status.
-
Post your homeall?
Also, remapping Z to E1 would let us test your current config on a different driver.
-
@JoergS5 said in Single Z-Motor doesn't move:
I saw that Z is immediately homed, I wonder how the Z position can be 50.
I pressed "home Z" and thereafter two times "Z+25", just to check if the motor would move (it didn't).
Can you please check
G91 G1 H2 Z100
whether the stepper rotates?
And then M122 and check the line for driver 2.
When I press "Home Z" and thereafter "G91 G1 H2 Z100" the motor also doesn't move, the M122 result is as follow:
"Driver 2: ok, SG min/max 0/0"BTW I wonder why your console says Z endstop is triggered, but in your config you disabled endstops.
Which lines does indicates this?
Thank you for your help so far! -
@Phaedrux that would be very sad, I just used it a few times in only simular configurations and just started with construction of the printer. As I planned to use E1 for an extruder and E0 for the double Y axis, I could not miss the Z-driver. Is the warranty less than a year?
Thank you for your help so far!