Unsolved No Movement with RRF3.1+
-
Hello
I am trying to update my CoreXYUV machine from this post...(https://forum.duet3d.com/topic/16375/core-xyu-or-xyuv)
to a firmware newer than 2.02 which was at the time the latest version that would the machine in the correct mannerAs a start point in documenting my 'troubles', I thought I may as well try RRF3, so have converted my configs, I believe correctly, but on any version greather than 3.0 - I am unable to get ANY movement from the drives at all
I don't 'appear' to have any config.g errors...?
output from M122
m122.txtconfig.g
config (2).gdrive5, the first drive on the duex, has been removed from the board due to release of magic smoke from an incorrect stepper wiring incident, but like I mentioned above, everything moves on RRF3.0 (although not correctly from a CoreXYUV standpoint) and worked prefectly fine since May on 2.02
Any help would be greatly appreciated !
-
M307 H3 A-1 C-1 D-1
this command is not valid anymore
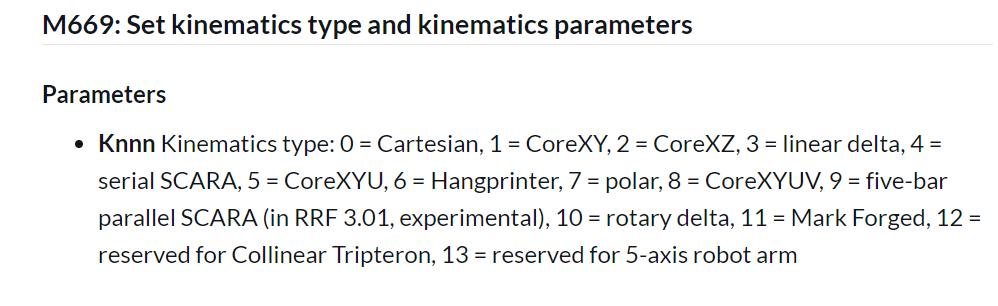
M669 K8 ; select CoreXY mode
that is not corexy, thats polar
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M308 S2 P"e1temp" Y"thermistor" T100000 B4138 ; configure sensor 2 as thermistor on pin e1tempB4138 is wrong, look up the correct value in your thermistor documentation.
also stay with stable firmware 3.1.1 for now until you get it working
Driver 5: position 0, temperature-shutdown! short-to-ground, standstill, SG min/max not available
is on of your drivers broken?
-
@Veti i thought 7 was polar ?
As mentioned, most of this config.g was updated from a working 2.02 config
I wasn't too worried about the finer bits until I got it moving the right way, hence the possibly incorrect values
I've tried 3.1.1, but I have the same issue, with that version also - I only get movement with 3.0
Yes, Driver 5 has been (physically) removed from Duex5
-
Failed to mention this error is given in console when attempt to move a X or Y axis (after issuing M564 H0)
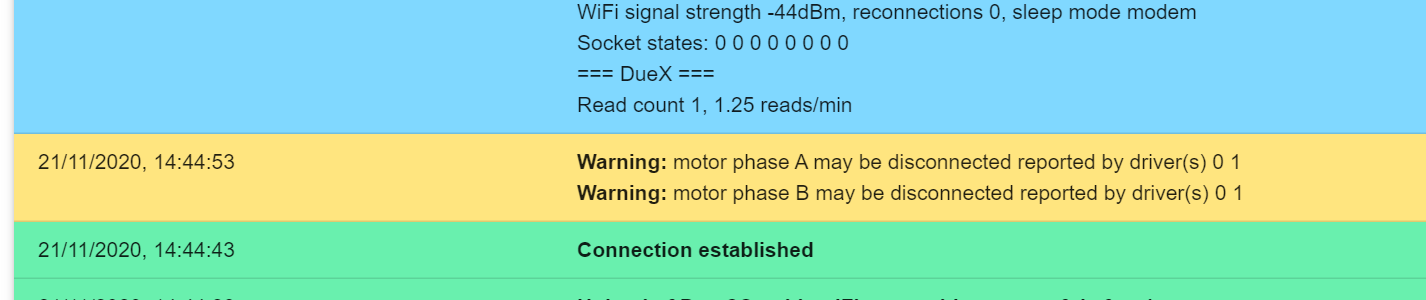
Output of M122 after changing FW to 3.1.1...
M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.1.1 running on Duet WiFi 1.02 or later + DueX5 Board ID: 08DGM-9T6BU-FG3SD-6J1D6-3SJ6Q-TAJHG Used output buffers: 3 of 24 (14 max) === RTOS === Static ram: 27980 Dynamic ram: 95416 of which 44 recycled Exception stack ram used: 344 Never used ram: 7288 Tasks: NETWORK(blocked,368) HEAT(blocked,1168) DUEX(suspended,160) MAIN(running,1880) IDLE(ready,80) Owned mutexes: WiFi(NETWORK) === Platform === Last reset 00:00:48 ago, cause: software Last software reset details not available Error status: 0 MCU temperature: min 26.9, current 27.5, max 28.0 Supply voltage: min 24.1, current 24.3, max 24.5, under voltage events: 0, over voltage events: 0, power good: yes Driver 0: standstill, SG min/max not available Driver 1: standstill, SG min/max not available Driver 2: standstill, SG min/max not available Driver 3: standstill, SG min/max not available Driver 4: standstill, SG min/max not available Driver 5: temperature-shutdown! short-to-ground standstill, SG min/max not available Driver 6: standstill, SG min/max not available Driver 7: standstill, SG min/max not available Driver 8: standstill, SG min/max not available Driver 9: standstill, SG min/max not available Date/time: 2020-11-21 14:45:22 Cache data hit count 81236213 Slowest loop: 6.52ms; fastest: 0.13ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 3.3ms, write time 0.0ms, max retries 0 === Move === Hiccups: 0(0), FreeDm: 169, MinFreeDm: 167, MaxWait: 13866ms Bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves: 2, completed moves: 2, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 15.33ms; fastest: 0.00ms Responder states: HTTP(2) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 1 of 8 - WiFi - Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 WiFi firmware version 1.24 WiFi MAC address a0:20:a6:31:b9:f0 WiFi Vcc 3.44, reset reason Unknown WiFi flash size 4194304, free heap 27064 WiFi IP address 192.168.0.29 WiFi signal strength -44dBm, reconnections 0, sleep mode modem Socket states: 0 0 0 0 0 0 0 0 === DueX === Read count 1, 1.25 reads/min -
ok so the driver reports that both phases are disconnected, that makes sense than there is no movement then.
but why does it work on 2.02. thats very strange.
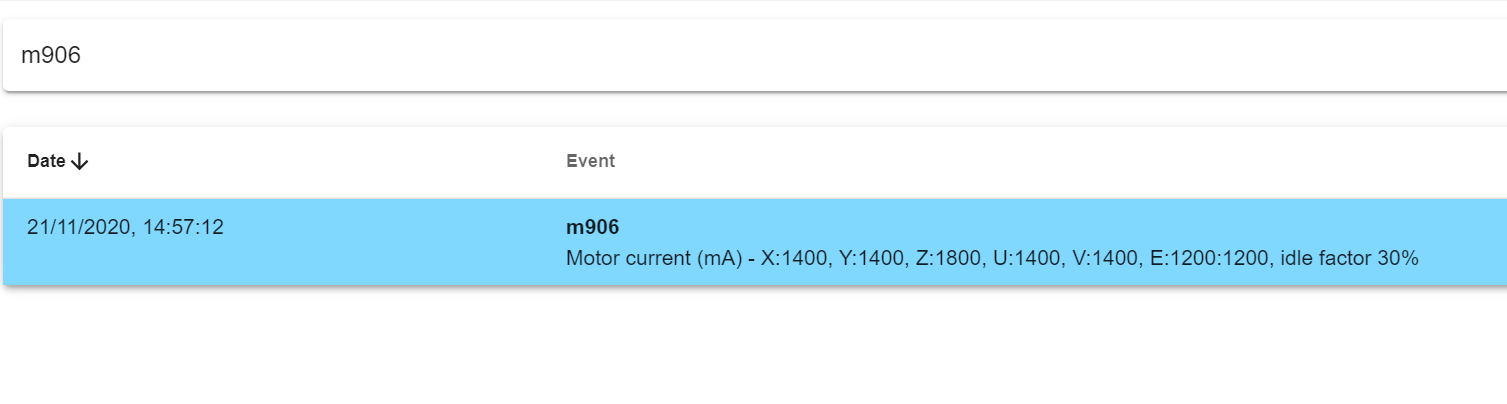
can you post the output of M906 ?
and yes 8 is corexyuv, i got confused by the corexy comment in your config
-
@Veti - Yes.. Here it be
No worries, I even tried K1, to see if at least 2 motors would run, no joy
At least the Bltouch works !

-
can you disconnect the duex5 ribbon cable and see if that works?
-
I have to admit i didn't try that

But, yes - I now get movement, so can only guess it's got something to do with the Drive5 - removed one on the Duex
-
Whilst I'm now getting movement, It's still not as expected/desired...
like why does my U carriage move when I home Y ?But i'll do a seperate post for that.
Would still like to know if I can get movement with the duex5 in it's current state on this FW somehow ?
-
@dc42 can you comment on that?
-
@curlypaul, you've posted your new config,g file, but please can you post the working RRF2.02 config.g file too so that I can work out your machine configuration.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 but what would make all motors stop moving in rrf3 if he has a bad driver on the duex5?
-
@dc42 config.g from 2.02 below..
The one thing that you may notice is that I have to use M669 K5 to get correct behavior, Not K8; Configuration file for Duet WiFi (firmware version 2.02) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v2.1.3 on Sun Dec 08 2019 16:18:30 GMT+0000 (Greenwich Mean Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"IDEX" ; set printer name M669 K5 ; select CoreXY mode ; Network M551 P"curly" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S0 ; physical drive 1 goes forwards M569 P2 S0 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M569 P4 S0 ; physical drive 4 goes forwards M569 P5 R-1 ; physical drive 5 disabled M569 P6 S1 ; physical drive 3 goes forwards M569 P7 S1 ; physical drive 3 goes forwards M584 X0 Y1 Z2 U4 V3 E6:7 P4 ; set drive mapping M350 X16 Y16 U16 V16 Z16 E16:16 I1 ; Configure microstepping with interpolation M92 X160 Y160 U160 V160 Z1280 E396:396 ; Set steps per mm M566 X600 Y600 U600 V600 Z50 E3000:3000 ; Set maximum instantaneous speed changes (mm/min) M203 X20000 Y20000 U20000 V20000 Z600 E9000:9000 ; Set maximum speeds (mm/min) M201 X1000 Y1000 U1000 V1000 Z600 E3000:3000 ; Set accelerations (mm/s^2) ;M204 P1500 T1800 ; Set printing and travel accerations M906 X1400 Y1400 U1400 V1400 Z1800 E1200:1200 I30 ; Set motor currents (mA) and motor idle factor in per cent M84 S60 ; Set idle timeout ; Axis Limits M208 X-3 Y-92 U100 Z0 S1 ; set axis min M208 X380 Y320 U425 Z325 S0 ; set axis max ; Endstops M574 X1 Y1 U2 S1 ; set endstops controlled by ENDSTOPS M574 Z1 S2 ; set endstops controlled by probe ; Z-Probe M307 H3 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch M558 P9 H5 F200 T9000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X12.5 Y75. Z0.75 ; set Z probe trigger value, offset and trigger height M557 X15:350 Y10:278 S67 ; define mesh grid ; Heaters M305 P0 T100000 R4700 B4725 C7.060000e-8 M307 H0 A73.2 C151.3 D12.9 S1.00 V24.3 B0 ; set thermistor + ADC parameters for heater 0 M143 H0 S90 ; set temperature limit for heater 0 to 120C M305 P1 T100000 R4700 B4725 C7.060000e-8 ; set thermistor + ADC parameters for heater 1 M143 H1 S270 ; set temperature limit for heater 1 to 280C M307 H1 A460.4 C235.5 D4.5 S1.00 V24.3 B0 M305 P2 T100000 R4700 B4725 C7.060000e-8 ; set thermistor + ADC parameters for heater 1 M143 H2 S270 ; set temperature limit for heater 1 to 280C M307 H2 A600.0 C221.8 D4.6 S1.00 V24.2 B0 ; Fans M106 P0 S0 I0 F50 H-1 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off M106 P1 S1 I0 F50 H2 T45 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on M106 P7 S1 I0 F50 H1 T45 ; set fan 7 value, PWM signal inversion and frequency. Thermostatic control is turned on M106 P8 S0 I0 F10 H-1 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off ; Tools M563 P0 S"X-AXIS" D0 H1 F8 ; define tool 0 G10 P0 X0 Y0 U0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M563 P1 S"U-AXIS" D1 H2 X3 F0 ; Define tool 1 G10 P1 X0.1 Y-0.3 U0 Z0 ; Set tool 1 axis offsets G10 P1 R0 S0 ; Set initial tool 1 active and standby temperatures to 0C M563 P2 S"T2 COPY" D0:1 H1:2 X0:3 F0:1 ; Define tool 2 Ditto Printing G10 P2 X75 Y0 U-75 Z ; Set tool 2 axis Ditto Printing offsets G10 P2 R0 S0 ; Set initial tool 2 active and standby temperatures to 0C M567 P2 E1:1 ; Set mix rtio 100% on both extruders ; Custom settings are not defined M501 -
One thing I noticed yesterday (running 3.2beta3) is that setting a negative tool offset for Z seems to permanently disable movement for that axis. You can move the axis in the Dashboard panel, the current position changes, but no actual movement occurs.
For example if I do
G10 P0 X0 Y0 Z-0.06then any Z axis movement is disabled and the board behaves as if the drivers were busted. Maybe a similar problem occurs for U.It took me a while to realize this was caused by the negative
G10 P0 Z-0.06bit, I was convinced I had somehow managed to kill all four Z drivers on my Duex. -
@curlypaul said in No Movement with RRF3.1+:
The one thing that you may notice is that I have to use M669 K5 to get correct behavior, Not K8
How did CoreXYU work before? What happened to V?
-
@Phaedrux it's a bit hard to explain/remember properly without being with the printer, but the main issue is U will move towards the homed X when homing Y.
also X,Y,U positions are lost/reset when homing other axis
Seemingly random but repeatable moves after and during homing.
Certainly with 2.03,2.04 and 2.05, the UV motors won't move at all if a movement in XY is commanded, resulting in what at the time I called 'angry noises'
Where as 2.02 set at K5, seems to have the printer work exactly as I'd expectIt might be best to video the difference and let that explain
-
I wonder if this is a similar issue as here
-
@Phaedrux I will give this a try at the weekend
Thank you for posting this -
@curlypaul I think I know what is going on. The newer version of the TMC2660 driver includes code to reset the microstep position to zero before it enables the driver. That isn't going to work if the driver has been removed. I will disable that feature for drivers that have been disabled using M569 R-1.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 - That's awesome - Thank you (and Tony) for looking into this for me
")