Help me understand Input Shaping
-
I've read through the documentation, installed the Plug-in and done some tests, but I'm not fully understanding what I should expect.
My printer is a RatRig VCore3 (400x400x400) and I'm using a 6HC with SBC and a 1LC toolboard, bot the the latest stable firmware.
This is how I have the accelerometer setup, and I think I got the orientation right.
M955 P121.0 I16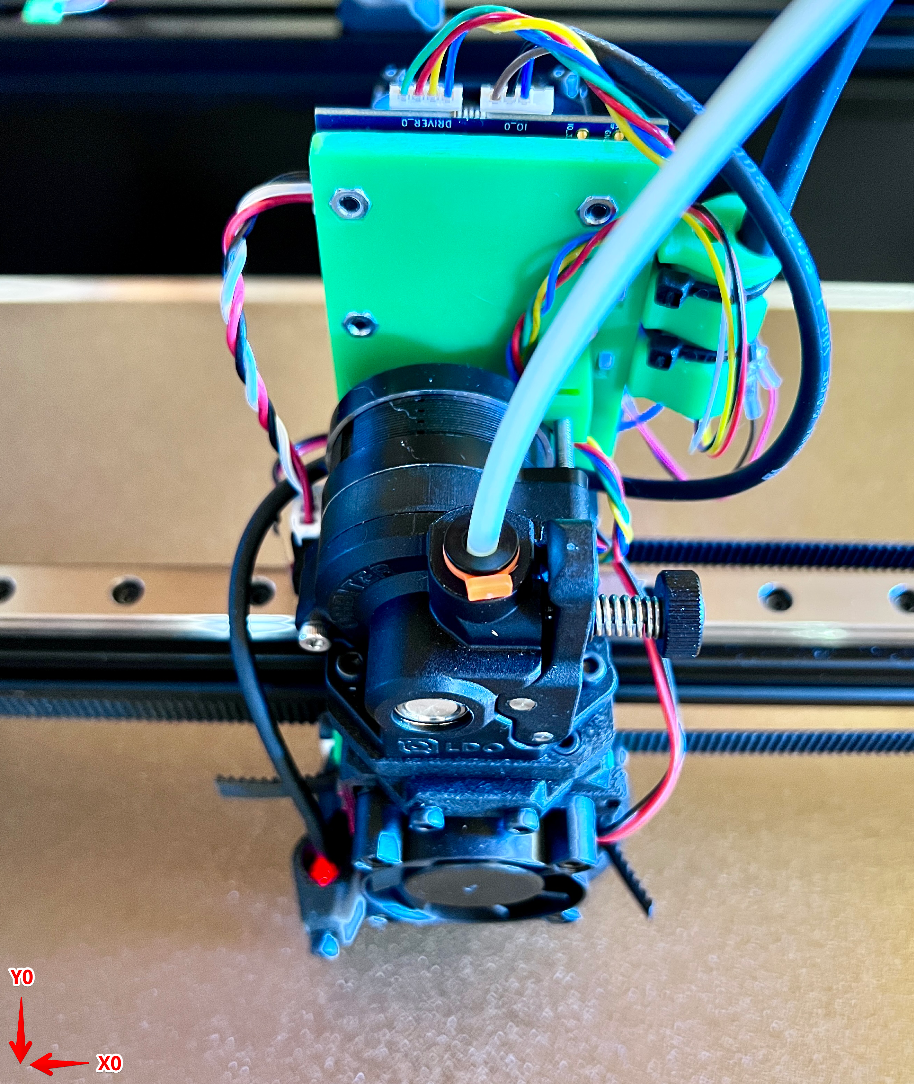
(this is looking from the front and 0,0 is in the front left corner)I've run several runs and they always come out slightly different, sometime rather different. Here one of them, without any IS active.
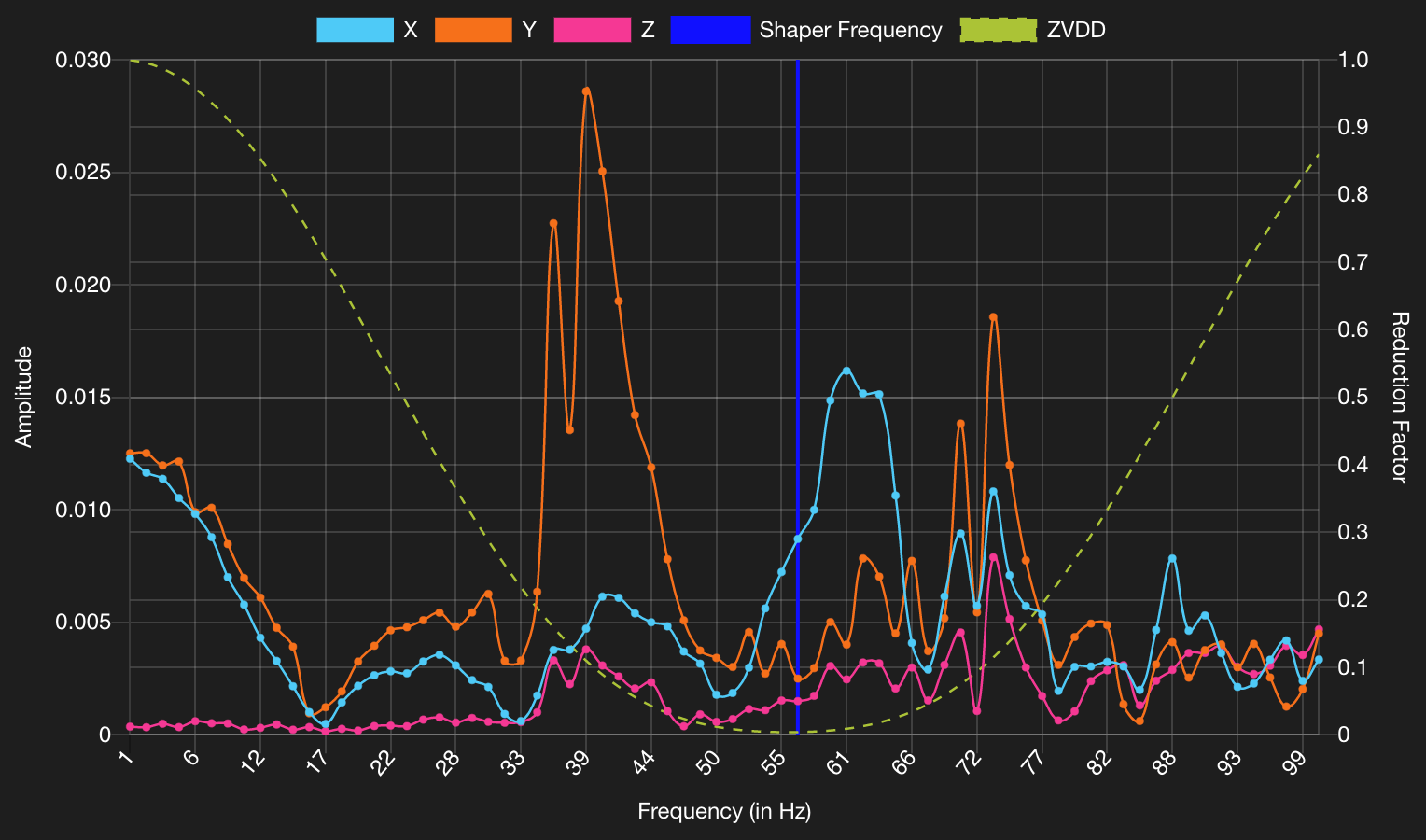
From my understanding of the documentation I shall determine any large peaks and if more than one set the "Shaper center frequency" in the middle. First of all I'm not sure what would qualify as a significant peak, in the previous images I can identify three that stands out, two on the Y axis and one on X. Though I'm not sure I should allow for more than one peak per axis?
Next up is what I think is the best result (I manually activated one IS model at a time and recorded a new motion profile.
This is the result with ZVDD active at 56Hz and 0.1 damping factor.
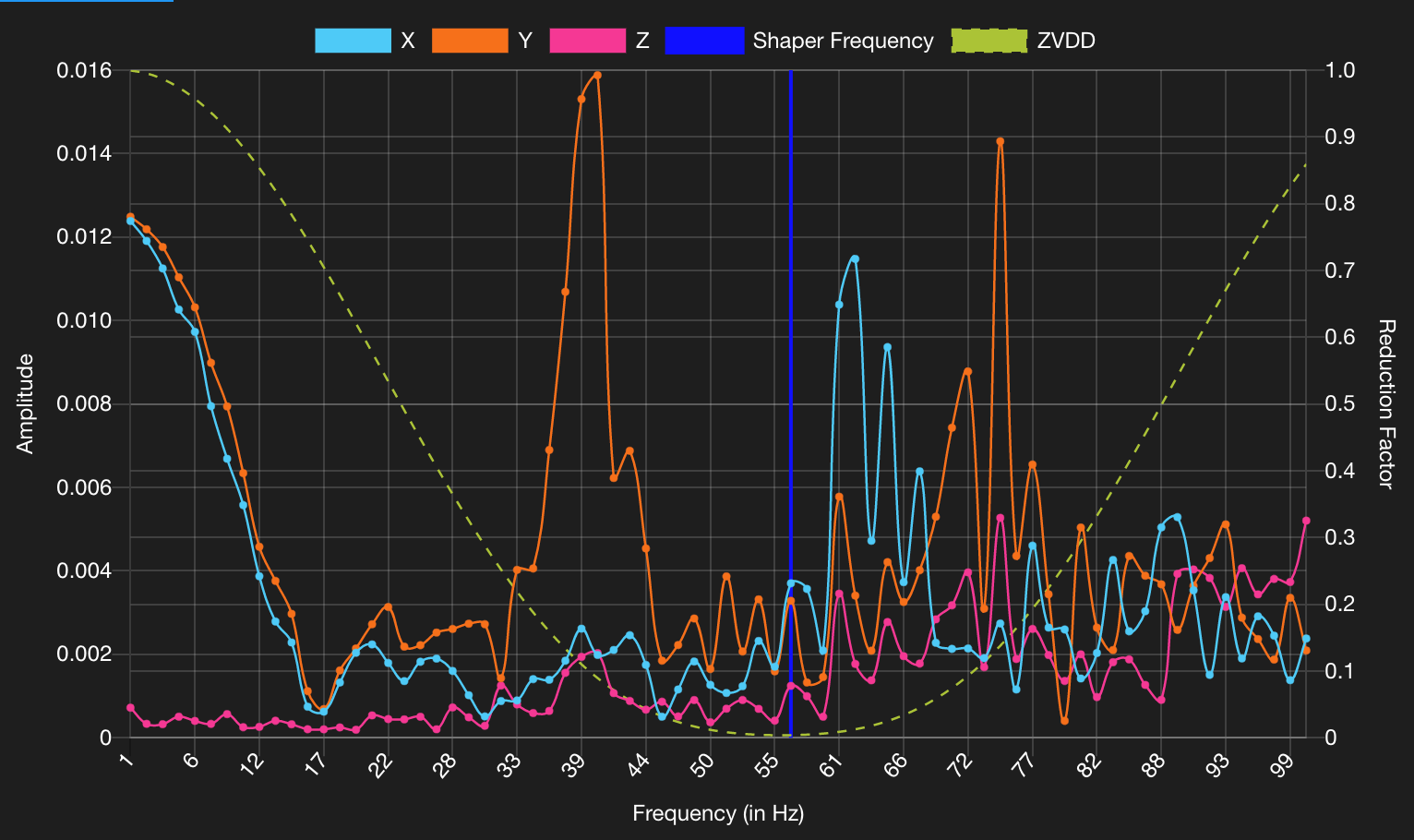
The peak amplitude goes from 0.029 to 0.016 which is relative terms seams great, but I have no idea if in reality it is? Or what's considered a great, ok and bad amplitude value?
Also these peaks, do we have any clue what causes them?
What does Damping factor do, I assume it alters how much impact the filter will have? How shall it be used, what are resonable values?
One last thing -- I haven't used Klipper myself but I've seen videos of what I think are people doing IS tuning and in those videos the printer tested a lot of different movement speeds, everything from really slow to so fast you couldn't even see, only hear the motion.
But I might have misunderstood and that was intact some other type of test?
Anyhow I was just a curious to why RRF does a single scan and not multiple and take a average with any outliers removed?Sorry for the long post, I hope someone can help me understand and learn a bit
")
-
@Reine said in Help me understand Input Shaping:
The peak amplitude goes from 0.029 to 0.116 which is relative terms seams great, but I have no idea if in reality it is? Or what's considered a great, ok and bad amplitude value?
This depends on the machine. input shaping is clearly removing a lot of the Y axis ringing but not as much of the X axis ringing
Anyhow I was just a curious to why RRF does a single scan and not multiple and take a average with any outliers removed?
That's a good question. Ringing is excited by acceleration, so Klipper may be scanning a range of accelerations, or just a range of velocities. If it is a range of accelerations that does not make sense to me, unless the acceleration is being adjusted for different prints. If it different velocities then there should not be a significant difference in the frequencies observed. You could try a couple of different velocities on your printer and see if the captures were much different.
-
@T3P3Tony klipper people do adjust acceleration for features, i.e. infill gets higher accel than internal perimeters who get higher acceleration than external perimetets.
-
@oliof ok fair enough, do you know if they adjust the input shaping for each of the accelerations? if so then maybe thats why they need to scan at different accelerations.
-
As I have no reference, can someone help me understand what the graphs are telling me?
39Hz is that pointing towards some specific part that causes it?
Amplitude, what it a lot and how little is great?
-
@T3P3Tony I don't think they do.
-
@Reine this video is about the klipper input shaper graphs, but ignoring the different scales I think it explains it relatively well... https://youtu.be/M-yc_XM8sP4