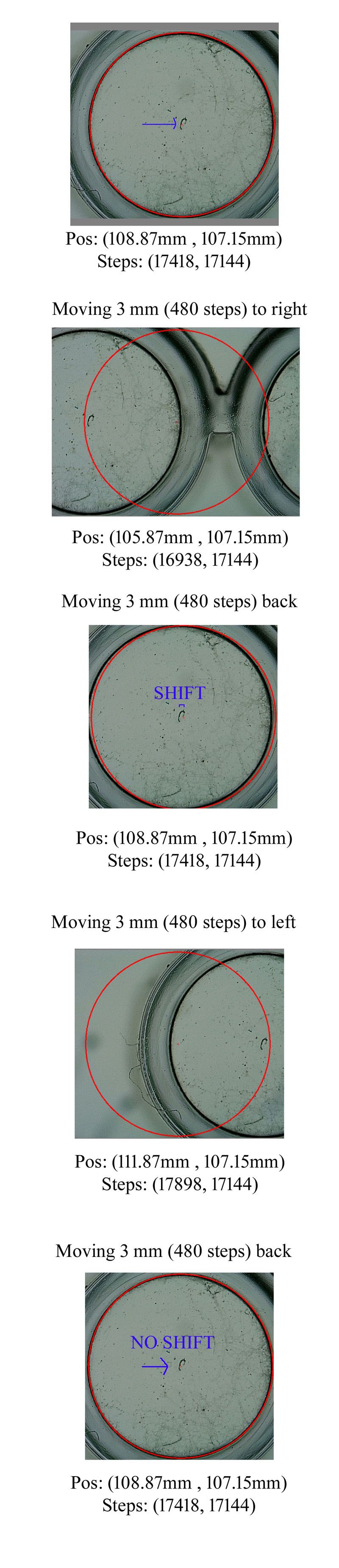
I built a corexy camera handling device. However, I am having problems with movement accuracy. When I move the car to the right and back, the return point does not coincide with the starting point. But when I move the car to the left again and return, the return point coincides with the starting point. This does not depend on the number of micro-steps (16, 32 ...) I am sending the images.
Does anyone know what the problem is?
Latest posts made by Ricardo
-
Coordinate inaccuracyposted in General Discussion