Problems geting started with Duet web control
-
I have a Duet3 board connected to a Rapsberry pi 4.
The pi is connected to keyboard and computer screen.I can start the Duet web control and I get a message that it connects to the Duet3 board, but I cant get axes to show.
I feel that Im a bit out on deep water, my plan was to learn along the way, but now Im stuck.
It would be very helpful if some on could giv me a hint on what could be wrong or were I can find mor info.
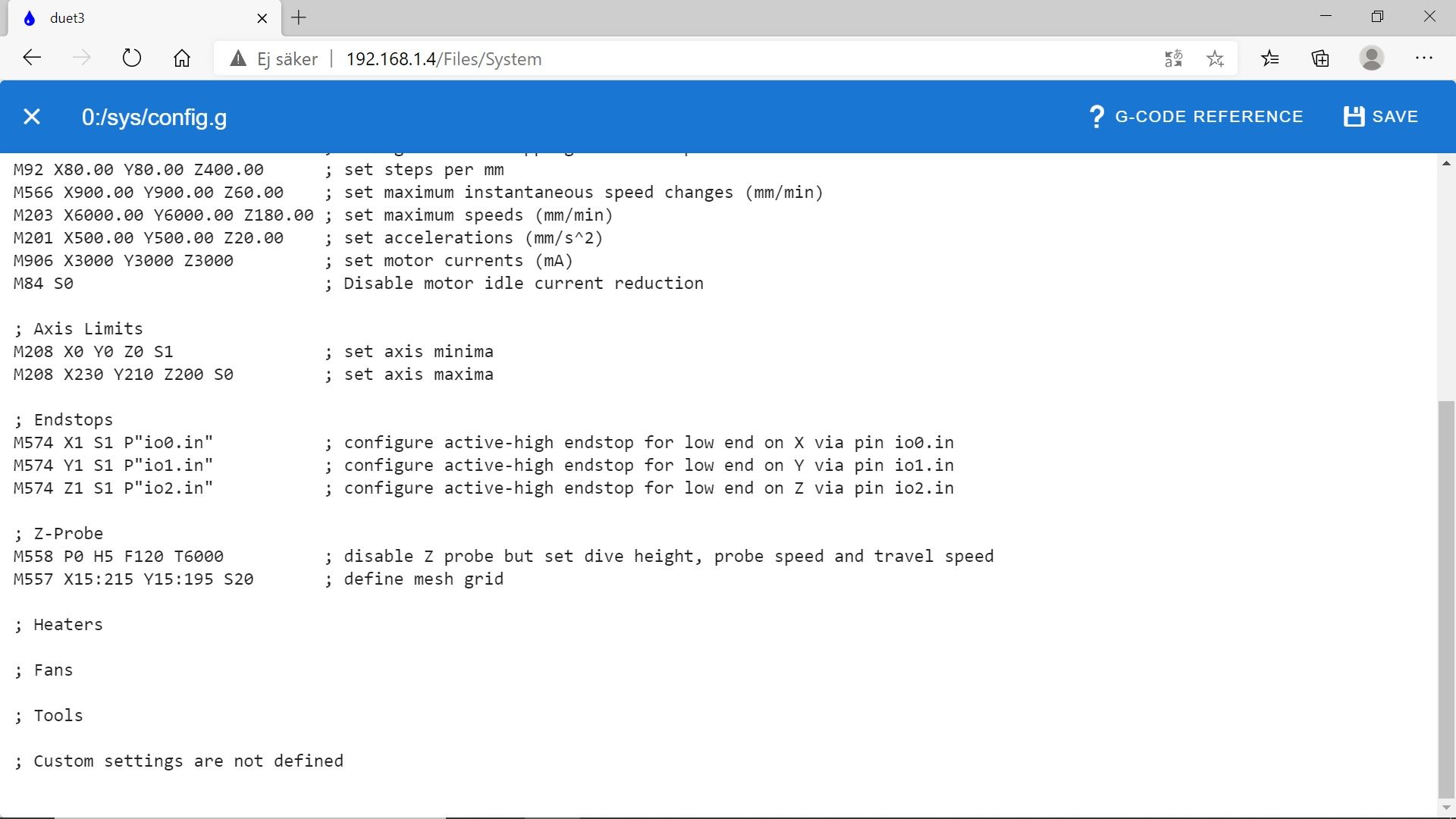
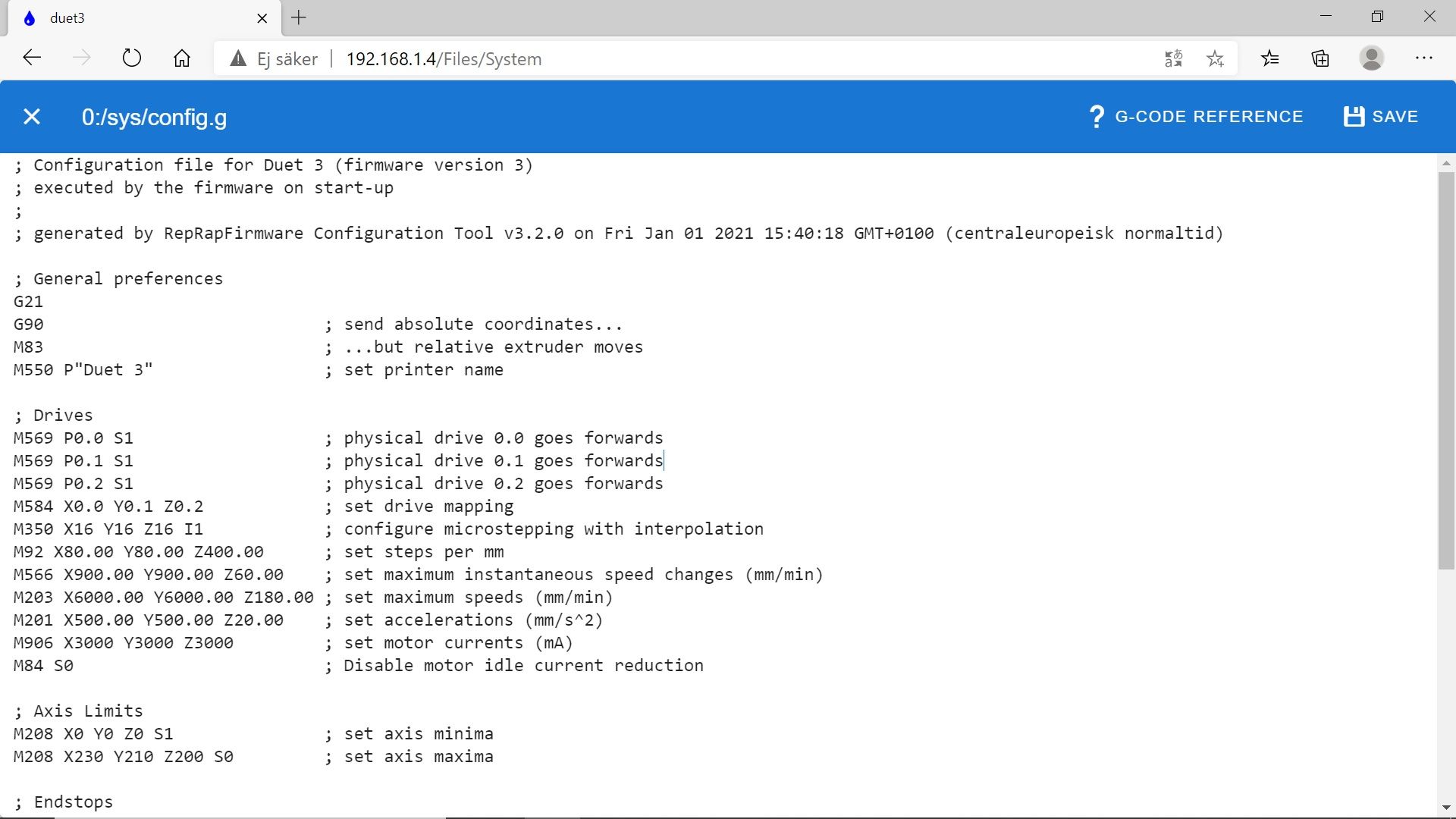
See pics of web control and config.g below.
I tried to make the config as simple as possible just to test a stepper motor.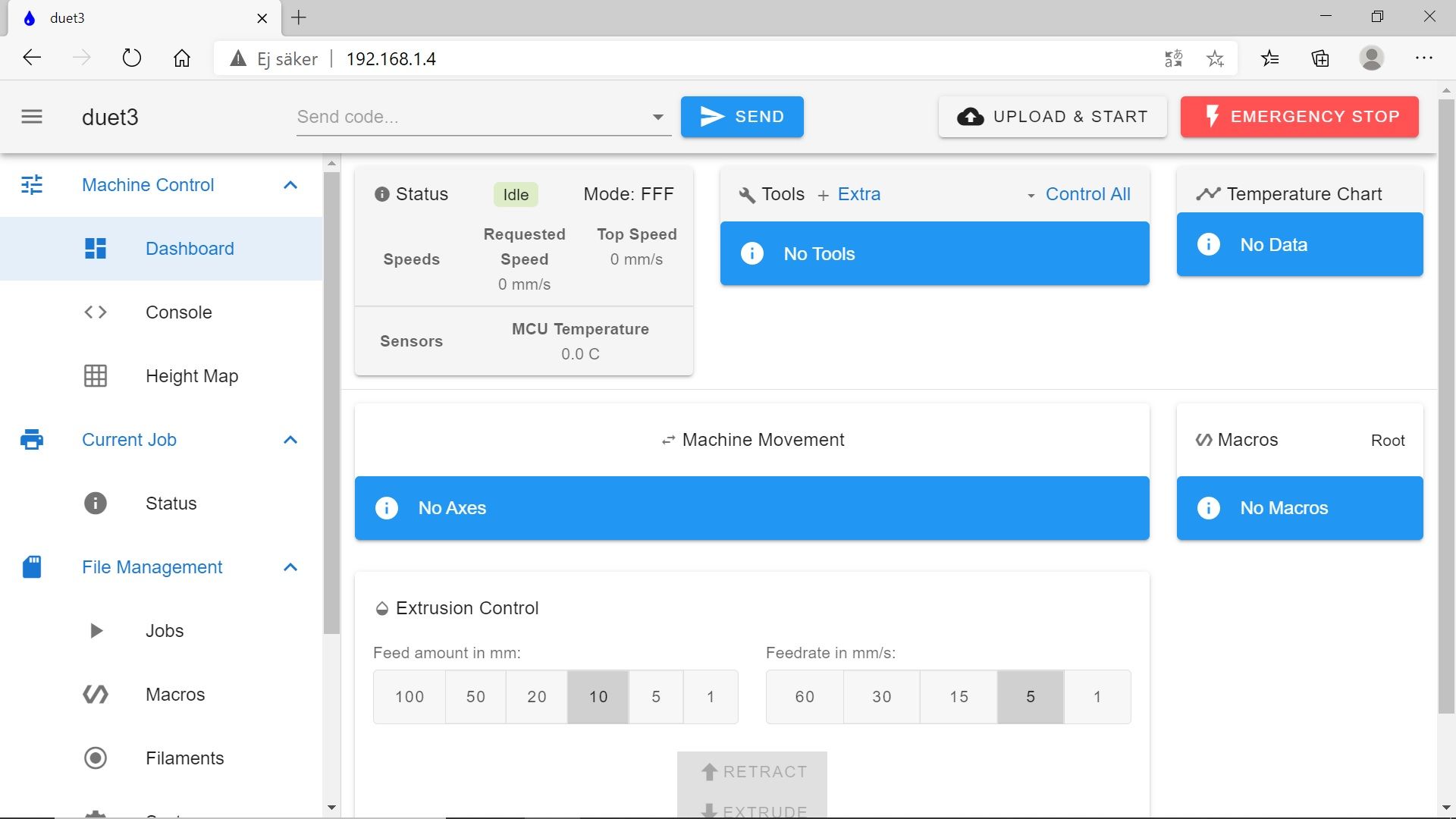
-
Hi,
do you have someting like that in you config.g? -->
; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M554 P0.0.0.0 ; gateway M553 P255.255.255.0 ; subnet mask M586 P0 S1 ; enable HTTP M586 P1 S1 ; enable FTP (for remote backups) M586 P2 S0 ; disable Telnet -
Can you post a text copy and paste of your full config.g and the results of sending M122 and M98 P"config.g" in the gcode console?
-
@medicusdkfz With the PI, DWC will complain about network stuff being in config.g. It's not need with the PI.
-
M550 P"Duet 3" is probaby throwing an error - remove the space to match the hostname,
-
Thanks for reply!
I took a way the space in the Duet3 name.
I sent the G code commands, i hope I got it right.
See pic and config.g text below.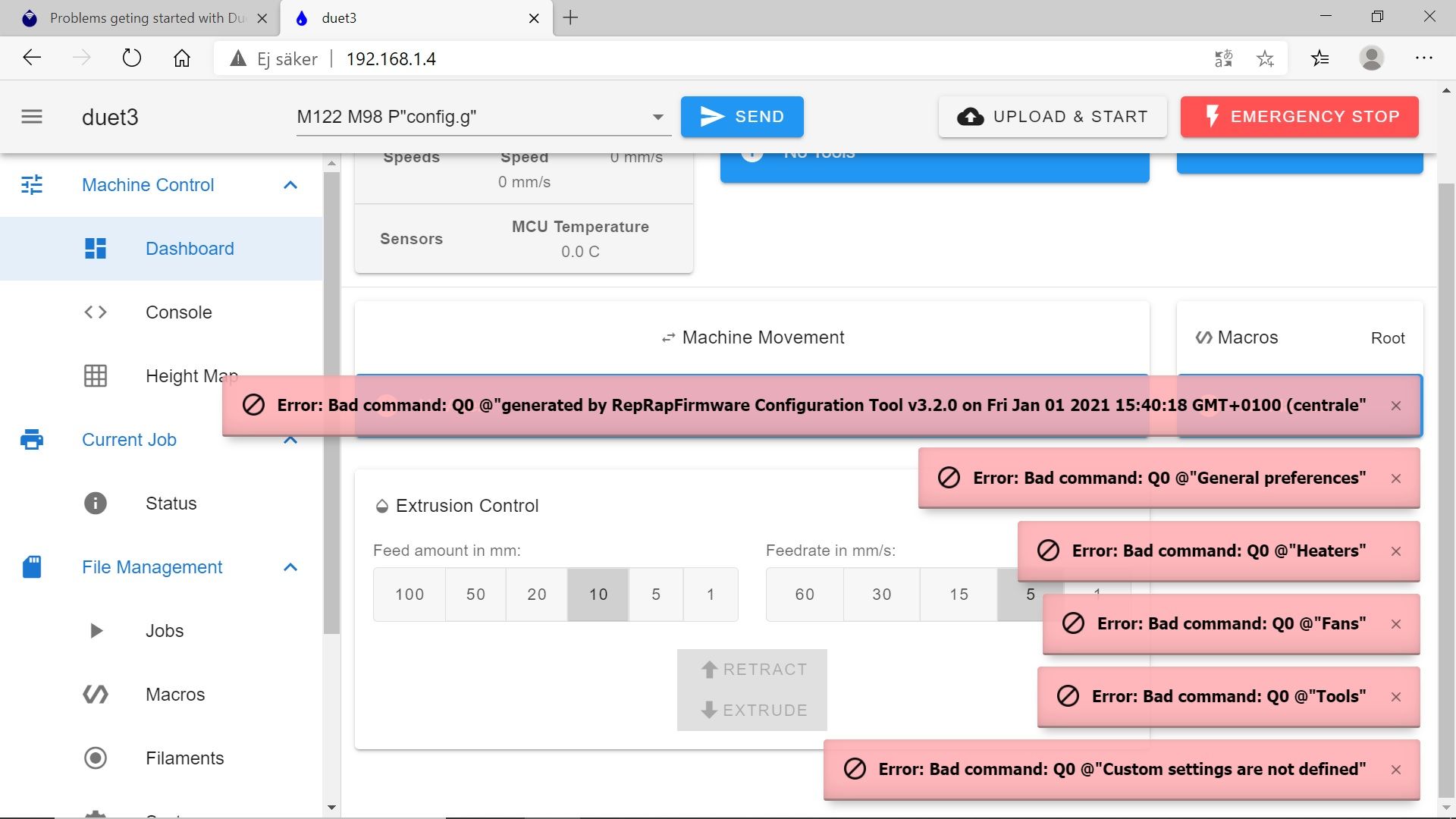
; Configuration file for Duet 3 (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.0 on Fri Jan 01 2021 15:40:18 GMT+0100 (centraleuropeisk normaltid); General preferences
G21
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Duet3" ; set printer name; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M584 X0.0 Y0.1 Z0.2 ; set drive mapping
M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2)
M906 X3000 Y3000 Z3000 ; set motor currents (mA)
M84 S0 ; Disable motor idle current reduction; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X230 Y210 Z200 S0 ; set axis maxima; Endstops
M574 X1 S1 P"io0.in" ; configure active-high endstop for low end on X via pin io0.in
M574 Y1 S1 P"io1.in" ; configure active-high endstop for low end on Y via pin io1.in
M574 Z1 S1 P"io2.in" ; configure active-high endstop for low end on Z via pin io2.in; Z-Probe
M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
; Fans
; Tools
; Custom settings are not defined
-
it seems you did not copy the config correctly
its complaining about special characters. -
@sol88 I have been having the same issue and I am stuck. I've tried the config tool multiple time and it looks like everything is setup but getting the same bad commands as well as no tools or anything else showing in DWC.
The only thing I did to try to fix since is in each .g file to include the config.g was to delete any line that started with a semicolon. This got rid of the bad commands but now it says incompatible firmware even after update through sudo CMD to 3.2
-
@rebel_yell_101 Please start a new thread and include the details of your setup. Include your config.g. What duet board? Include the results of M122 and M98 P"config.g".