RRF Configurator questions...
-
I hope this is where I can post these questions.
I think I'm all wired up and ready to get back to setting up my machine. I'm trying to use the online configurator;
https://configurator.reprapfirmware.org/I have tried to figure this out, but I know my BL Touch settings aren't right and I'd rather post again than trust to luck. (cost me $65 last time..)
I'm trying to find these specs online but I just can't seem to figure out any calculators or direct numbers that seem to correlate to what's being asked on the configurator. I've perused through the duet3d docs, but it's really confusing to me (for now) and again, the terminology seems to be beyond my current understanding..
SO, that all being said, here's what I have.
BLV Mod frame with 2 Z Stepper motors.
V6 Hotend Not clone
BL Touch Not clone
Duet3D Not clone
Stepper Motors Model; j-4218hb2401
here's a link to some specs on the motor (what I could find) https://www.aliexpress.com/item/32817779500.html
I'm using a 12V power supply
Wiring is verified by others on this siteI know this is a lot to ask, but I'm not trusting my understanding at all at this point until I learn more. I'd just like to get my printer up and running and learn along the way. Thank you all!!
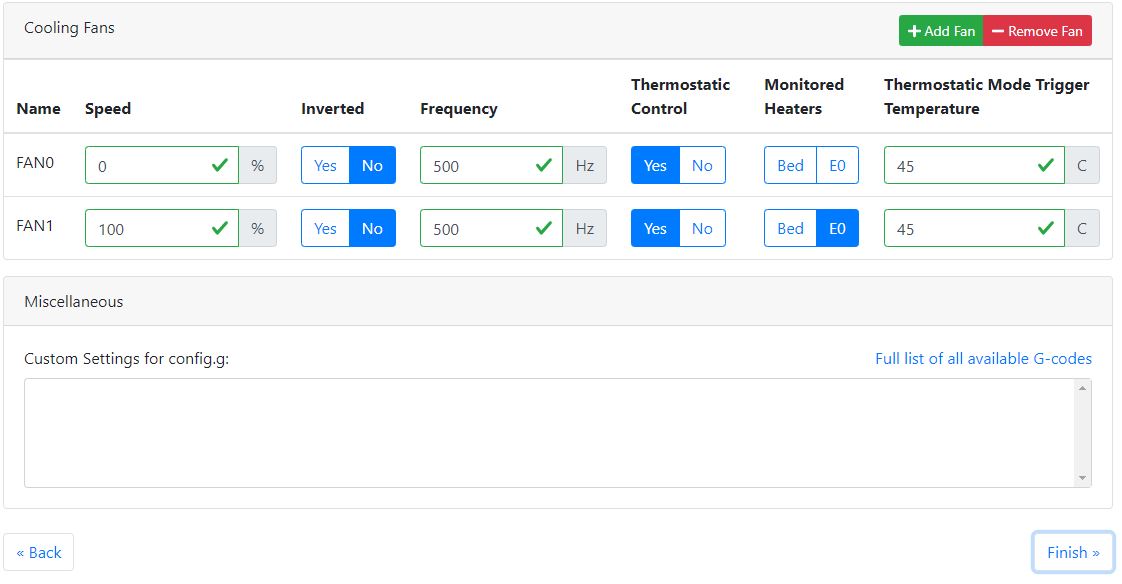
Here's a shot for shot of the configurator and what I'm trying to figure out..





-
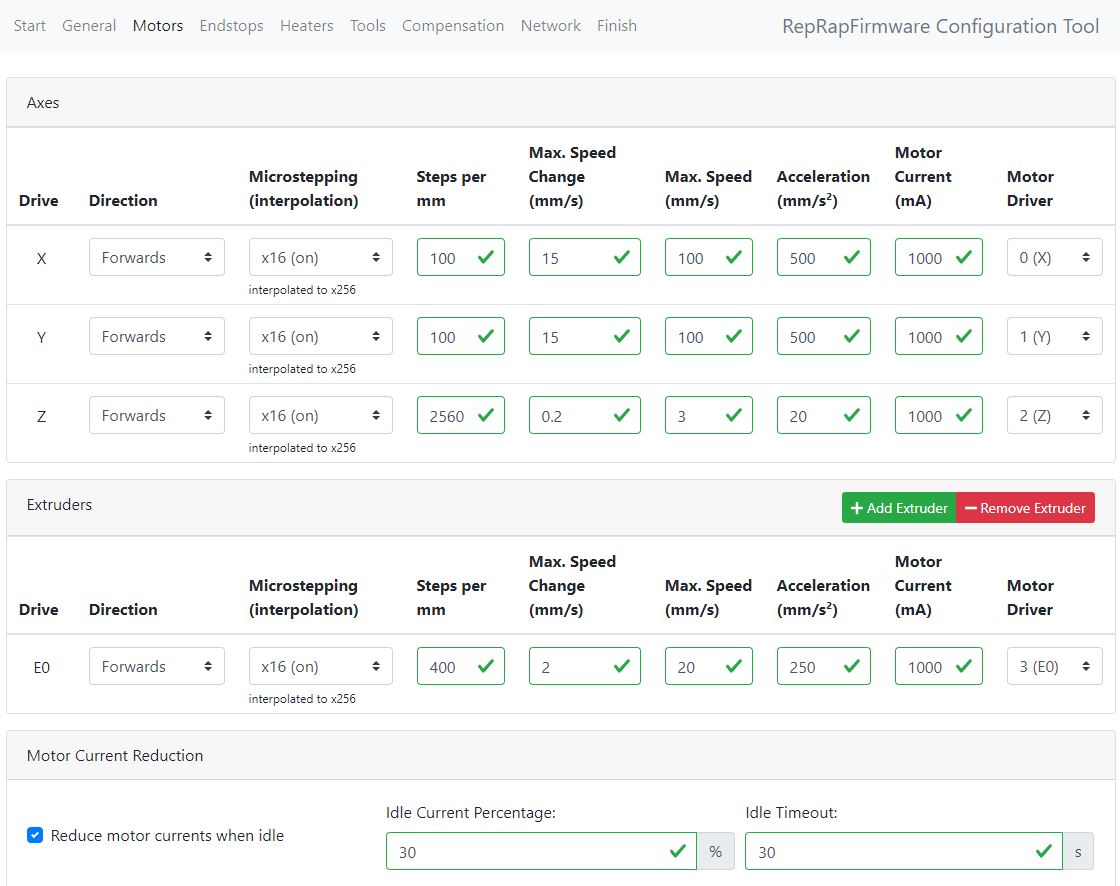
motor current should be 75% of the rated current.
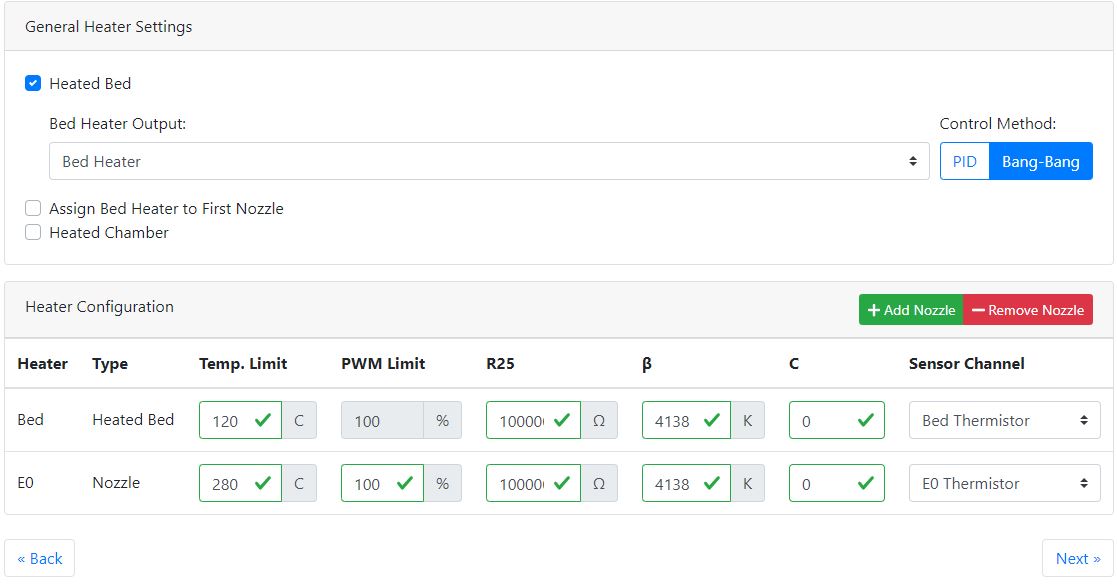
your thermistor values are wrong for an e3d v6 and probably for your hotbed.
fan0 should not be thermistatic controlled.
z steps of 2560 is almost certainly wrong
e0 steps need to be calibrated..
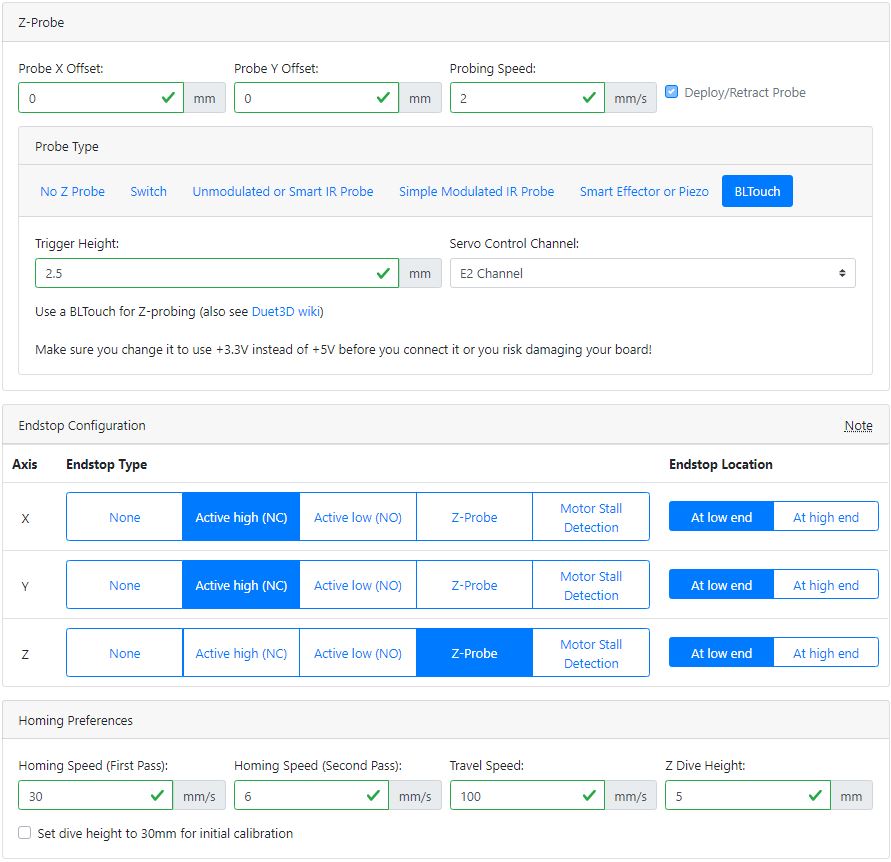
probe x y offset are not defined.
trigger height needs to be measured.whats your reason for going with a 12v psu and 1.8 degree steppers on the blv?
-
@hbrownell, please post the config.g file that the configurator generated and you uploaded to /sys on the SD card. Most of us find config.g files easier to read than screen shots from the configuration tool!
-
@hbrownell
Motors:-
for the motors you mentioned I'd start with 1200-1300 mA
-
100 steps/mm doesnt look right to me please refer to this calculator to get the relevant values for your specific setup.
same goes for Z steps/mm -
steps/mm on your extruder can be calibrated after you are setup:
- measure and mark 150mm of filament from a fixed point (i.e. extruder body)
- tell your printer to extrude 100mm of filament
- measure again to determine the actual amount of filament extruded
- calculate your new steps/mm using this formula: <current steps/mm> / <actual amount of filament extruded> * <length you wanted to extrude(100 mm in this example)>
Heater config
-
for your V6 if you got the standard kit the values should be R25=100000 B=4725 C=7.06e-8
But please look here for more detailed information to double check. -
for your heatbed, you will have to look up your specific model and the type of thermistor used. Check the datasheet of that thermistor to get your values.
BLTouch:
-
Probe X and Y Offsets are the distance from your nozzle to the BLTouch, this depends on your mounting solution
-
Trigger height is the distance from your nozzle to the bed once when the BLTouch triggers, this is also unique to your config and needs to be measured.
Fans:
- Fan0 should be your part cooling fan and should not be thermostatically controlled
- Fan1 config looks fine, if it does not work, try changing the PWM frequency.
-
-
@jv43 The Bed was an A8 replacement,
It is 1% 100K 3950 300℃. - from the repI am running a 16 tooth pulley for the belt, so the number that I get says 100 Steps pM, is that right?
-
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v2 on Fri May 24 2019 20:44:40 GMT-0500 (Central Daylight Time); General preferences
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves; Network
M550 P"3DPrinter" ; Set machine name
M552 S1 ; Enable network
M587 S"----" P"--------" ; Configure access point. You can delete this line once connected
M586 P0 S1 ; Enable HTTP
M586 P1 S0 ; Disable FTP
M586 P2 S0 ; Disable Telnet; Drives
M569 P0 S1 ; Physical drive 0 goes forwards
M569 P1 S1 ; Physical drive 1 goes forwards
M569 P2 S1 ; Physical drive 2 goes forwards
M569 P3 S1 ; Physical drive 3 goes forwards
M350 X16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation
M92 X100.00 Y100.00 Z2560.00 E400.00 ; Set steps per mm
M566 X900.00 Y900.00 Z12.00 E120.00 ; Set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; Set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; Set accelerations (mm/s^2)
M906 X1100.00 Y1100.00 Z1100.00 E1100.00 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; Set axis minima
M208 X210 Y210 Z200 S0 ; Set axis maxima; Endstops
M574 X1 Y1 S1 ; Set active high endstops; Z-Probe
M574 Z1 S2 ; Set endstops controlled by probe
M307 H6 A-1 C-1 D-1 ; Disable heater on PWM channel for BLTouch
M558 P9 H5 F120 T6000 ; Set Z probe type to bltouch and the dive height + speeds
G31 P500 X34.82 Y-8 Z2.5 ; Set Z probe trigger value, offset and trigger height
M557 X15:195 Y15:195 S20 ; Define mesh grid; Heaters
M305 P0 T100000 B4138 R4700 ; Set thermistor + ADC parameters for heater 0
M143 H0 S120 ; Set temperature limit for heater 0 to 120C
M305 P1 T100000 B4725 C7.060000e-8 R4700 ; Set thermistor + ADC parameters for heater 1
M143 H1 S280 ; Set temperature limit for heater 1 to 280C; Fans
M106 P0 S0 I0 F500 H T45 ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P1 S1 I0 F500 H1 T45 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on; Tools
M563 P0 D0 H1 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C; Automatic saving after power loss is not enabled
; Custom settings are not configured
; Miscellaneous
M501 ; Load saved parameters from non-volatile memory -
@hbrownell said in RRF Configurator questions...:
I am running a 16 tooth pulley for the belt, so the number that I get says 100 Steps pM, is that right?
yes
-
@dc42 does the configuration look ok? Should I start it up like this?
-
@hbrownell said in RRF Configurator questions...:
@dc42 does the configuration look ok? Should I start it up like this?
You should not have a M587 command in config,g. It won't work there anyway. Other than that, I didn't spot anything wrong with it.
-
@dc42 Thank you! On to the next round of troubleshooting.