Incorrect object model / status when multiple drivers on Z
-
Board: Duet 3 MB6HC (MB6HC)
DSF Version: 1.2.4.0
Firmware: RepRapFirmware for Duet 3 MB6HC v0.6 or 1.0 3.01-beta3 (2020-01-29b1); Axis to driver mapping M584 X0 Y1 U2 Z3:4:5 ; X and Y for CoreXY. U for toolchanger lock. Z has three drivers for kinematic bed suspension. M584 E1.0:1.1:2.0:2.1 ; Extruders for four tools. M569 P0 S0 ; Drive 0 direction | X stepper M569 P1 S0 ; Drive 1 direction | Y Stepper M569 P2 S0 ; Drive 2 direction | U Tool Changer Lock M569 P3 S0 ; Drive 3 direction | Front Left Z M569 P4 S0 ; Drive 4 direction | Front Right Z M569 P5 S0 ; Drive 5 direction | Back Z ; End of main board drivers. Expansion boards have three each. ; Expansion 0 M569 P6 S0 ; Drive 6 direction | Extruder T0 M569 P7 S0 ; Drive 7 direction | Extruder T1 ; Expansion 1 M569 P8 S0 ; Drive 8 direction | Extruder T2 M569 P9 S0 ; Drive 9 direction | Extruder T3When requesting a http://ipofprinter/machine/status, it incorrectly shows drivers from 4 upward as being part of extruders, where 4 and 5 are actually part of Z. Here is a tree view of part of that response:
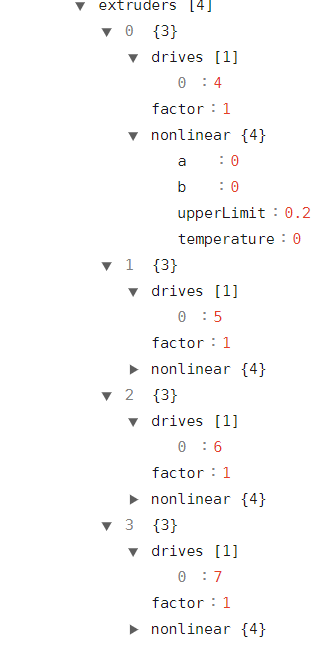
Here is the full response:
-
I noticed this while trying to reverse the first extruder.
M569 P6 S0
and
M569 P6 S1
Show no difference on the extruder itself.
-
@Danal said in Incorrect object model / status when multiple drivers on Z:
; Axis to driver mapping
M584 X0 Y1 U2 Z3:4:5 ; X and Y for CoreXY. U for toolchanger lock. Z has three drivers for kinematic bed suspension.
M584 E1.0:1.1:2.0:2.1 ; Extruders for four tools.M569 P0 S0 ; Drive 0 direction | X stepper
M569 P1 S0 ; Drive 1 direction | Y Stepper
M569 P2 S0 ; Drive 2 direction | U Tool Changer Lock
M569 P3 S0 ; Drive 3 direction | Front Left Z
M569 P4 S0 ; Drive 4 direction | Front Right Z
M569 P5 S0 ; Drive 5 direction | Back Z
; End of main board drivers. Expansion boards have three each.
; Expansion 0
M569 P6 S0 ; Drive 6 direction | Extruder T0
M569 P7 S0 ; Drive 7 direction | Extruder T1
; Expansion 1
M569 P8 S0 ; Drive 8 direction | Extruder T2
M569 P9 S0 ; Drive 9 direction | Extruder T3Your M569 commands for expansion boards are wrong. They should be e.g.:
; Expansion 0
M569 P1.0 S0 ; Drive 0 direction | Extruder T0
M569 P1.1 S0 ; Drive 1 direction | Extruder T1
; Expansion 1
M569 P2.0 S0 ; Drive 0 direction | Extruder T2
M569 P2.1 S0 ; Drive 1 direction | Extruder T3I will look into the M409 report.
-
I just started a system using your M584 commands in config.g. This was the result:
06/02/2020, 14:05:34 m409 k"move.extruders" {"key":"move.extruders","flags":"","result":[{"driver":"1.0","factor":100.0,"nonlinear":{"a":0,"b":0,"upperLimit":0.20},"pressureAdvance":0},{"driver":"1.1","factor":100.0,"nonlinear":{"a":0,"b":0,"upperLimit":0.20},"pressureAdvance":0},{"driver":"2.0","factor":100.0,"nonlinear":{"a":0,"b":0,"upperLimit":0.20},"pressureAdvance":0},{"driver":"2.1","factor":100.0,"nonlinear":{"a":0,"b":0,"upperLimit":0.20},"pressureAdvance":0}]} 06/02/2020, 14:05:24 m409 k"move.axes" {"key":"move.axes","flags":"","result":[{"acceleration":500.0,"drivers":["0.0"],"homed":false,"jerk":900.0,"letter":"X","machinePosition":0,"max":200.0,"min":0,"speed":6000.0,"userPosition":0,"visible":true,"workplaceOffsets":[0,0,0,0,0,0,0,0,0]},{"acceleration":500.0,"drivers":["0.1"],"homed":false,"jerk":900.0,"letter":"Y","machinePosition":0,"max":200.0,"min":0,"speed":6000.0,"userPosition":0,"visible":true,"workplaceOffsets":[0,0,0,0,0,0,0,0,0]},{"acceleration":20.0,"drivers":["0.3","0.4","0.5"],"homed":false,"jerk":12.0,"letter":"Z","machinePosition":0,"max":200.0,"min":0,"speed":300.0,"userPosition":0,"visible":true,"workplaceOffsets":[0,0,0,0,0,0,0,0,0]},{"acceleration":500.0,"drivers":["0.2"],"homed":false,"jerk":900.0,"letter":"U","machinePosition":0,"max":200.0,"min":0,"speed":6000.0,"userPosition":0,"visible":true,"workplaceOffsets":[0,0,0,0,0,0,0,0,0]}]}These look correct to me. I am using the internal build of RRF at https://www.dropbox.com/sh/3azy1njy3ayjsbp/AACquxr2m00eV568RZg5QG5wa?dl=0 running in standalone mode.
-
Thank you for the M569, that explains that...! I will update.
I will also try the internal build and report back, that will be this evening Central US timezone (about 10 hours from this post)