Feed speed reported wrongly with G1 H1 on delta
-
I have a delta running on a MB6HC with attached Raspberry Pi
Board: Duet 3 MB6HC (MB6HC)
DSF Version: 3.3.0
Firmware: RepRapFirmware for Duet 3 MB6HC 3.3 (2021-06-15)I've noticed that on a G1 H1 command (in my homedelta.g) the speed reported in the web interface is around 1.7x what the command specifies, e.g.
G1 H1 X750 Y750 Z750 F1800which should raise the head at 30mm/sec but claims to raise it at 52mm/s:
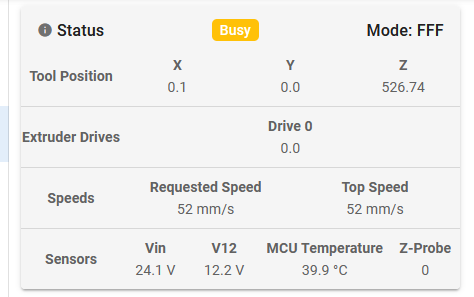
However, the head actually rises at the commanded speed, i.e. in this case 30 mm/s (taking about 18 seconds to move 520mm in the case I've just tested).
For 'normal' G1 commands with absolute coordinates the figure is reported correctly (reported speed and achieved speed both match commanded speed).
-
@achrn I can see why this happens. Normally, the feed rate you specify in the G1 command refers to the combined movement of the XYZ (and any other linear) axes. But when homing all 3 towers simultaneously on a delta, we want the feed rate to refer to the individual speeds of each of the towers. So RRF multiples the feed rate you ask for by sqrt(3) so that when it does the calculations, you get the correct feed rate. A consequence of that is that the reported feed rate is incorrect.