Clearpath servomotor --> 50Nm --> suggestion
-
Hi to all.
This question is addressed mostly to clearpath users because before I buy motors for them i would like to be sure i choose right. Of course, anyone else is more then welcome to participate in this conversation.What i would like to buy:
1.) SD servo motor so i can hook it up to DUET2.) Motor that will work on 100 RPM. At that speed i need partly peak 50 Nm of torque ( gear ratio can be adjusted to 20:1,10:1 etc ).
3.) this application requires high speed movement and overall weight of arms plus load can be reduced to 1kg.
I saw controller and software they are using so i guess that there is a way to set up something like this ?
If i look at constant torque diagram, there is no way to get more the 20Nm but then again, maybe this would be enough because peak torque will be reached just 1/2 of work time ?
Arnix
-
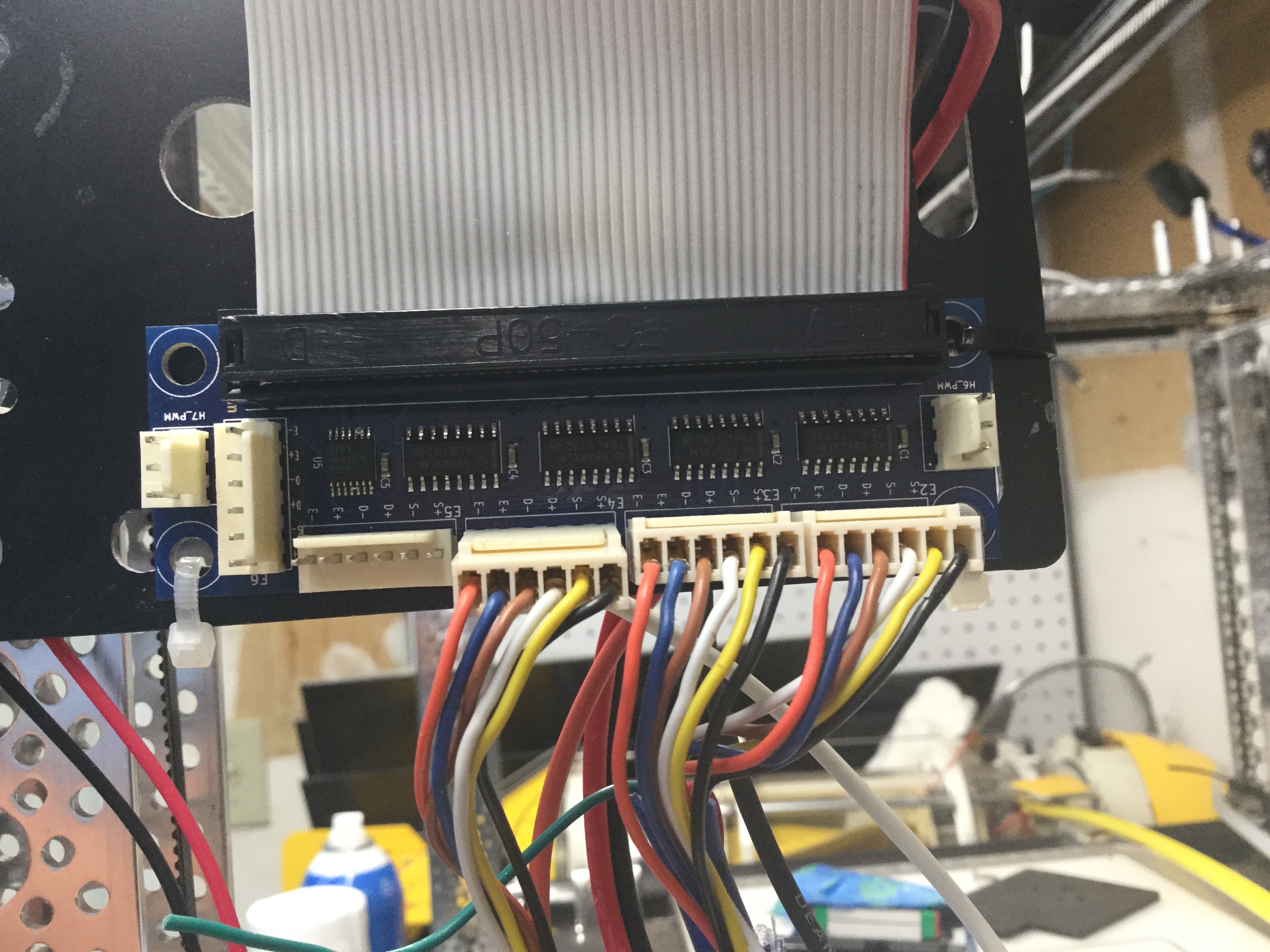
This is how I connected the Clearpath to the Duet expansion breakout board using the Clearpath wiring harness.

-
I’m using this servo on my 24 x 24 inch CNC Router, I have a smaller one on my 3D Printer. They are fast and powerful and overkill for both applications. I cannot relate to your application, contact Clearpath with your specs, they have helped me.

-
https://hackaday.io/project/12618-corexy-3d-printer-using-servos. I don’t know if the link works but this is my 3D Printer with servos.
-
Hi Ed.
Sorry for late reply. We have finally decided what we will buy. The torque moment is lower then we have define in our simulation but we will see what's gonna happen. If necessary am gonna create two "smaller" robots with 70cm radius each, to get this 60 pcs per minute.This is the motor in question:
https://www.teknic.com/model-info/CPM-SDSK-3426P-RLN/
with
25:1 gearboxTell me:
-
is there a way in this servo setup to calculate how much turns do i need for smooth pickups ?. Am asking this because in the stepper motor setup i have max torque at 200 steps so i would like to understand how can i "for sure " calculate needed turns and Nm. According to simulation and plus some "backup plan" to get this 60 pickups ( 0.4 // 02 // 0.4 ) i need 100 turns. Is this correct ?
-
i have send price request to one German and one Netherlands company, regarding the gearbox and i hope that they will reply this week.. Do you have some suggestion where can i buy something like this ( for some reasonable price ) ?
-
how important is the backlash value ( Chinese version has values under 15 arc/min ) in clearpath servo setup ?. In other words, can the lack of gearbox be reduced / compensated in servo motor setup ? Just an idea...
Maybe it can be "reduced" thru duet config ?
A.
-
-
I made a simple belt reduction to increase “Steps per MM” to improve print quality. Made a great improvement.

-
Hi Edkirk !
We have raised some money ( few colleges and I ) and we bought 3x SD motors. They are quite expensive but i hope that they will do the job...
Rated constant power is 300W per motor. Btw. i have bought 25:1 gearbox from one Chinese company and i must say, I am very impressed with the job that they have done. The company name is NewStartMotion and it was suggested by one of Teknic employee. The price for this gearbox is reasonable and product is very good.Am planning to start with basic wiring and setup today, so i will let you know how this works. Tell me:
- can i run this setup program on my linux OS box
- i saw some posts on the forum that config file should be changed to setup this new motors, maybe some additional wiring, etc...
OK, lets start with the wiring and then we can setup the rest.
A.
-
You will need a good crimping tool to make the plugs for the harness to plug into the expansion board. At some time Clearpath changed one of the wire colors so yours may not match the photo I posted above. Clearpath instructions are excellent but the information on color codes and application are in two separate parts of their manual.
-
Hi Ed.
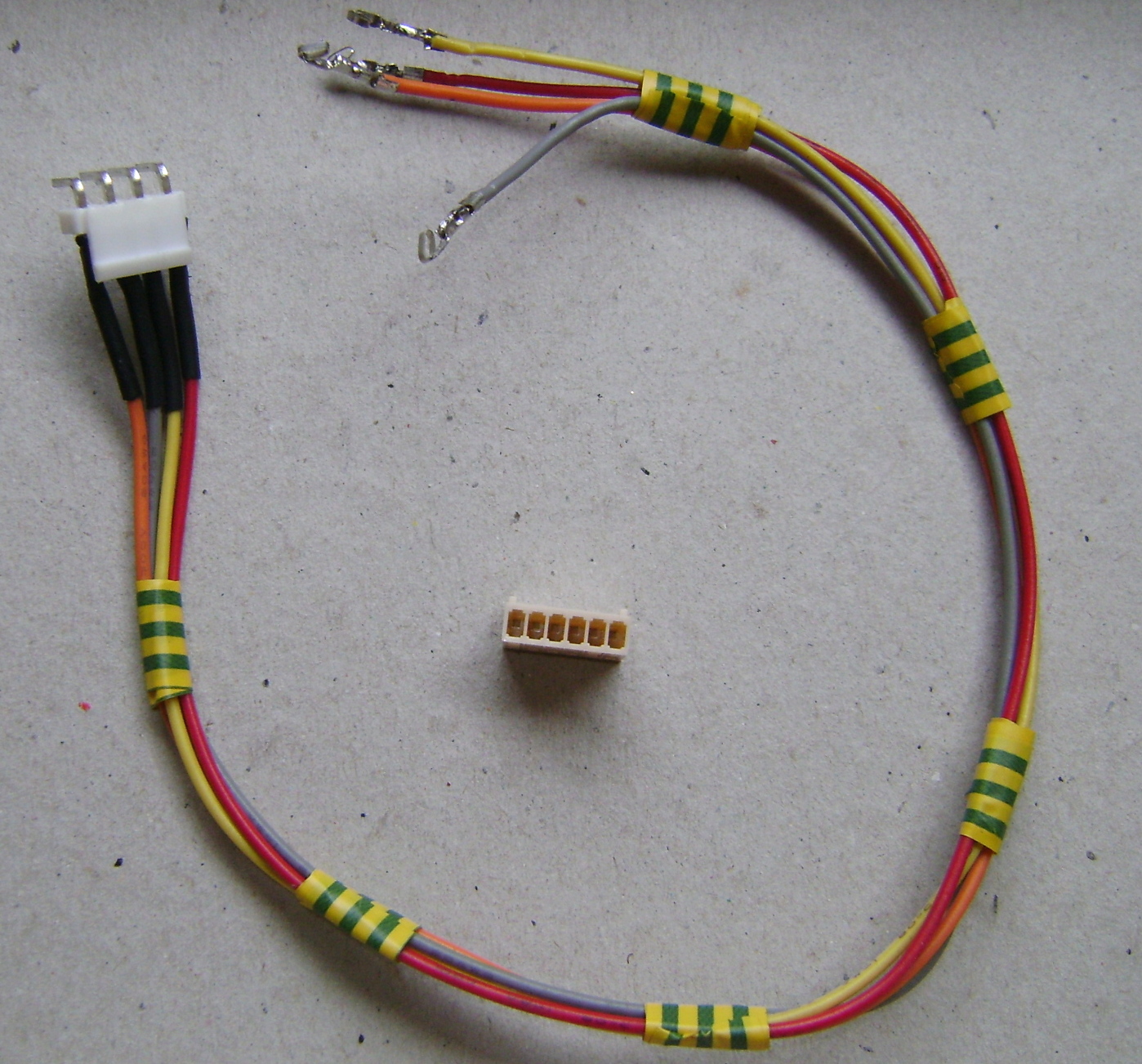
I didnt want to cut of the connector so I made some basic 2 "adapters" from the parts i have in garage. .
.I used angled ( the only one that i had ) pin header and soldered 6 wires on those headers. Other part of the wires are ready for standard inline 6 pin header. I just need to sort them in right order... Btw. where did you find manual ? Did you downloaded it form teknic website ?
-
Not going to work, Clearpath has to have + and - connected to each function; enable, step and direction. You can download the manual at their site. Soo easy to just Clearpath wiring and power supply.
-
Manual --> OK.
Just a quick review of your answer...Maybe we didnt understand us.
I have 2 sets of those cables ( 2 pcs of 4 pin headers).
I didnt do anything else accept extending the original cables without cutting the molex connector. This extension is just plugged in into existing molex connector ( with 1:1 color setup ).If i see correctly on your photo, inline connector is set without red and green wire.... Anyhow, i will take a look into manual
")
Regards !
-
Hi !
I tested the motor over USB and it worked perfectly.
I also found the wiring part in the clearpath manual so everything is set for duet test.Wiring for one motor is as follows:
Orange -> enable -
Blue --> enable +
Brown --> input A -
White --> input A +
Yellow --> input B -
Black --> input B +
Inline connector is wired to drive 5 of duets expansion board.OK. now what
How to make some basic test from duet ?
Do i need to add something to config.g file (M569 command), do i need any additional wiring ?At, the moment, motors are not connected to rotary delta robot and test will be made on one single motor.
Best regards and thank you in advance for your comment !
Arnix -
@arnix said in Clearpath servomotor --> 50Nm --> suggestion:
Do i need to add something to config.g file (M569 command)
Yes, you will need to add a T parameters to the M569 commands for the external drivers, which I presume are P5 P6 and P7. The Clearpath manual should say what values you need (they are step pulse width, step pulse interval, direction setup time, and direction hold time).
Then send G91 and then G1 S2 commands to test the motors individually.
-
Not to much to set up the Clearpath, once it is installed run the auto calibration as per instructions. The other thing is steps, the Clearpath has a setting for frequency and config.g M92 has steps per mm. if the frequency is to high and the steps is too low the motor shaft appears to not move, if it is the opposite the motor will turn very fast. Since you are using a reduction gear experiment before attaching the gear box. You will probably want to start with the frequency setting at its lowest. I set my frequency so the steps is around two to three hundred. then dial in M92 to get the proper travel. You don’t have this capability with a stepper motor.
-
@dc42
Hi David and thank you for replay.
P5 P6 and P7 ... step pulse width, step pulse interval, direction setup time, and direction hold time
So, basic setup should be something like this:
M569 P5 S1 ;
M569 P6 S1 ;
M569 P7 S1 ;
M569 P5 R1 T 2:2:5 ( need to be checked with manual )
... ?@Edkirk
Autocalibration:- i run the auto calibration part with 70% peak and it completed without problems. Gearbox is running as it should. At 2500 rpm i get 100 rpm / minute on gearbox. Weight test is also passed ok ( tested with 3 kg on gearbox shaft ). Now, there is an option for setup acceleration but i dont know what is some minimal or maximal value. If i set some bigger or lower value, then some defined limit value, will this be automatically corrected in MSP ? I know its basic question but motor is too expensive to test it with try / fail option :-). At the moment i have 2500 RPM ( max is 3010 RPM ) and acceleration is set to 3000...
Gear:
- OK, i will test it without gearbox, but after test i need to make auto calibration again. Should this auto tuning setup be "compatible" with my M92 / M569 manual tuning defined in duet ?
A.
-
Auto calibration is used to define how the servo works with the machine, fun to see the motor work. Other then remap outputs to the output board and calibrate steps per mm I didn’t make any other changes to Duet, other then miss wiring the motor it hard to damage the motor. Have you actually operated the motors with Duet?
-
I will test duet tomorrow. Can you share your M92 and M569 setup ?
-
My M92 and M569 are useless to your application which are machine specific and will be determined by the action of your machine. Mine is a corexy and I have not clue of what you are doing other then driving Clearpath servos with a Duet controller.
-
@Edkirk
I agree. But is there anything else accept those two command , that i need to watch for ?And, do you define M569 for each drive (p5/6/7 ) ?
A.
A.
-
HI guys !
We have finally set up the main rotary delta robot. Most of the problems ware in upper arm production and setup,but we solve it. Now it' time to wire all this. I will post picture of work in progress so someone alse can benefit from this too.Question:
I need to run auto calibration on each motor but the upper arm is now tightened to gearbox shaft. As far as i remember in the first auto calibration test, motor shaft has turn full circle few times and i can not do this now... Should i just dismantle the upper arm and make calibration without it or is there a way to set some option in calibration setup routine ?
A.