Clearpath servomotor --> 50Nm --> suggestion
-
HI guys !
We have finally set up the main rotary delta robot. Most of the problems ware in upper arm production and setup,but we solve it. Now it' time to wire all this. I will post picture of work in progress so someone alse can benefit from this too.Question:
I need to run auto calibration on each motor but the upper arm is now tightened to gearbox shaft. As far as i remember in the first auto calibration test, motor shaft has turn full circle few times and i can not do this now... Should i just dismantle the upper arm and make calibration without it or is there a way to set some option in calibration setup routine ?
A. -
I'm not sure what you mean by auto calibration, because RRF doesn't support that for rotary deltas. But you need to measure the upper arm angle at which each endstop triggers and put those angles into the M669 command.
-
i meant auto calibration as part of MSP software
It's related just to clearpath motor setup. -
Yes, you will need to add a T parameters to the M569 commands for the external drivers, which I presume are P5 P6 and P7. The Clearpath manual should say what values you need (they are step pulse width, step pulse interval, direction setup time, and direction hold time).
I have completed MSP auto config on all motors and they are ready for duet test. I will try with one motor just to see if this will work.
There is one thing that i dont understand...
Dont i need to set M584 command to remap motors to x,y,z, for use on external driver ? -
Yes, M584 X5 Y6 Z7
-
I still can not make any motor movements.
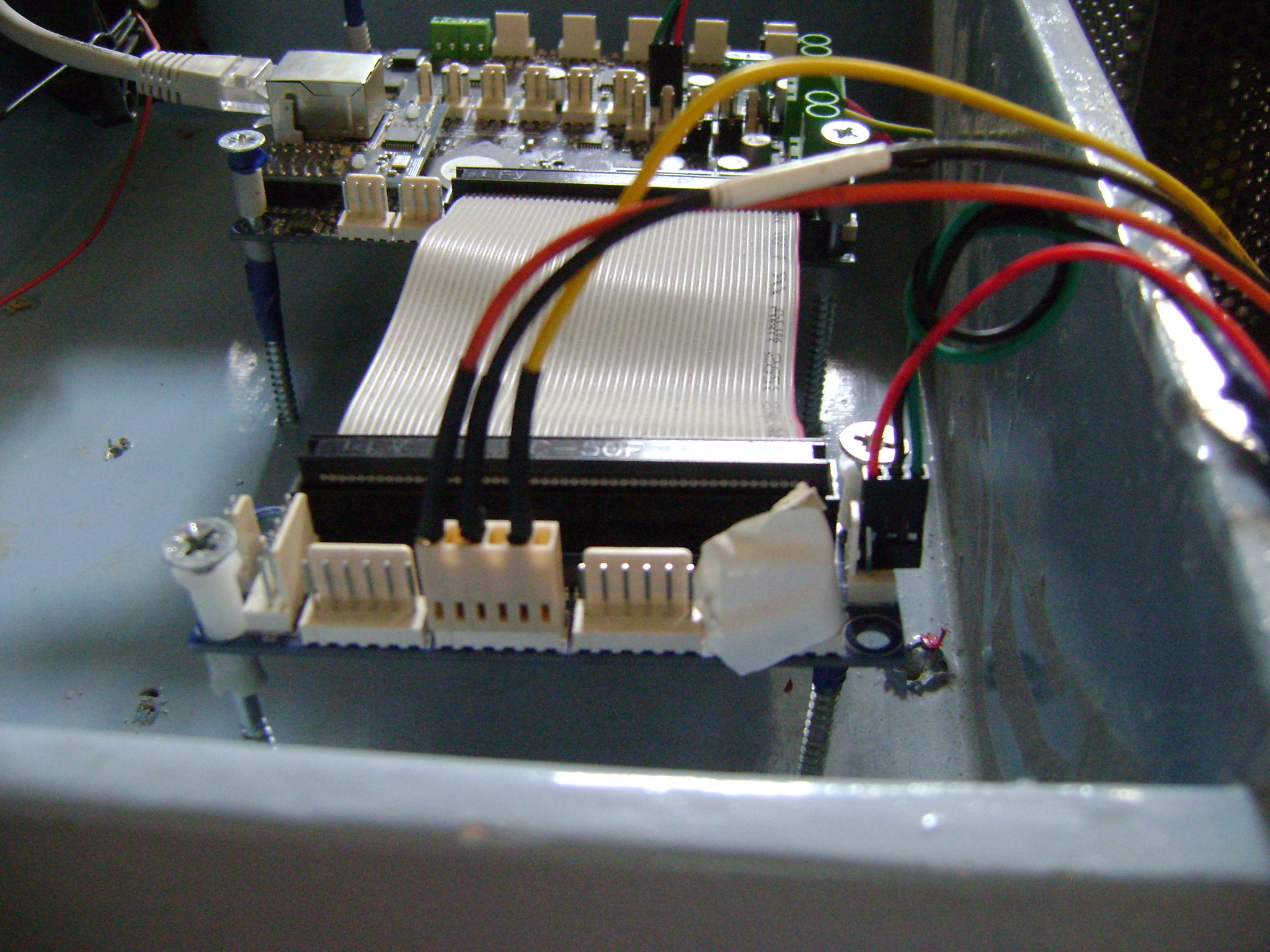
Just to be sure am doing this correctly, please guys, take a look at connections.... So far i have tested direct connection ( without 5V pin ) and with 5V pin. Pictures in attach...

Btw. I have connected white, blue, black and green to 5V pin. -
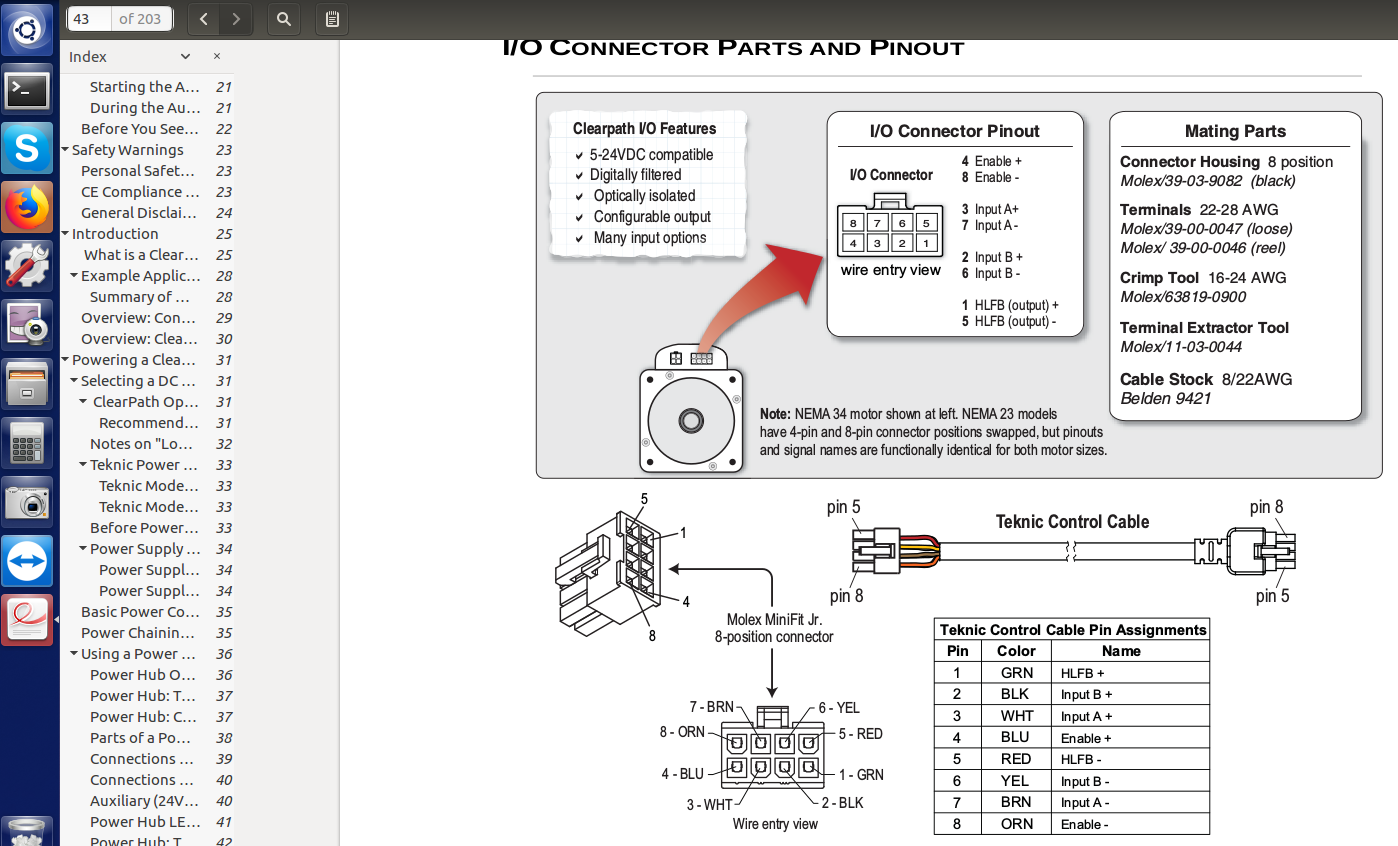
Sorry - your photos make no sense. I posted a photo of a working system back in January showing the Clearpath wiring plugged directly into the expansion board.
-
Hi EdKirk and thank you for reply.
Really no need to apologize. I am in learning phase with this kind of setup so any reply is more then welcome.I have tried to connect wires on the exactly same way as you did ( from left to right --> orange/blue/brown/white/yellow/ black ) but there was no movement whatsoever, so i pulled all positive wires (inputA+, inputB+, enable+, HLFB+ ) and hook them to 5V pin. I was thinking that this would help solving the "logic" part because its written in manual that 5V is some startup voltage...
Did you make some other HW changes ?
Btw. this is the setup that am using at the moment and this are the command that i use for test :; Drives
M569 P0 S0 ; Drive 0 goes backwards
M569 P1 S0 ; Drive 1 goes forwards
M569 P2 S0 ; Drive 2 goes forwards
M569 P3 S0 ; Drive 3 goes forwards
;------------------------------
M569 P5 R0 T3:3:3:3
M569 P6 R0 T3:3:3:3
M569 P7 R0 T3:3:3:3
M584 X5 Y6 Z7 E3:4Commands:
G91
G1 S2 Y50 F600Maybe there is a problem with my config setup ?

-
If the wires are connected properly the motors will work when configured properly and given a proper command. You should be able to read VDC on the enable pins and if my memory is correct the motor will hold hard when enable is energized, can not turn by hand. I don’t know if there is a command to energize enable. I don’t think you will get voltage on step and direction because they are digital signals. You can use G Code to rotate motors but I don’t commit it to memory, you will have to look it up. dc42 has some routines posted, I last used it in his setup instructions when setting up my Delta printer. Also if frequency is set to high in Clearpath the rpm will be so slow it appears to not be moving, set at a low number. Check if motor is frozen when given a command with Duet that means you are getting enable signal and something is going on. For normal operation with Duet everything has to be properly set up and correct. I found it difficult to convert from other controllers to Duet, very steep learning curve. I couldn’t get Duet to work until I ran the configurator and followed the instructions, no short cuts.
-
I did it ! It's working.
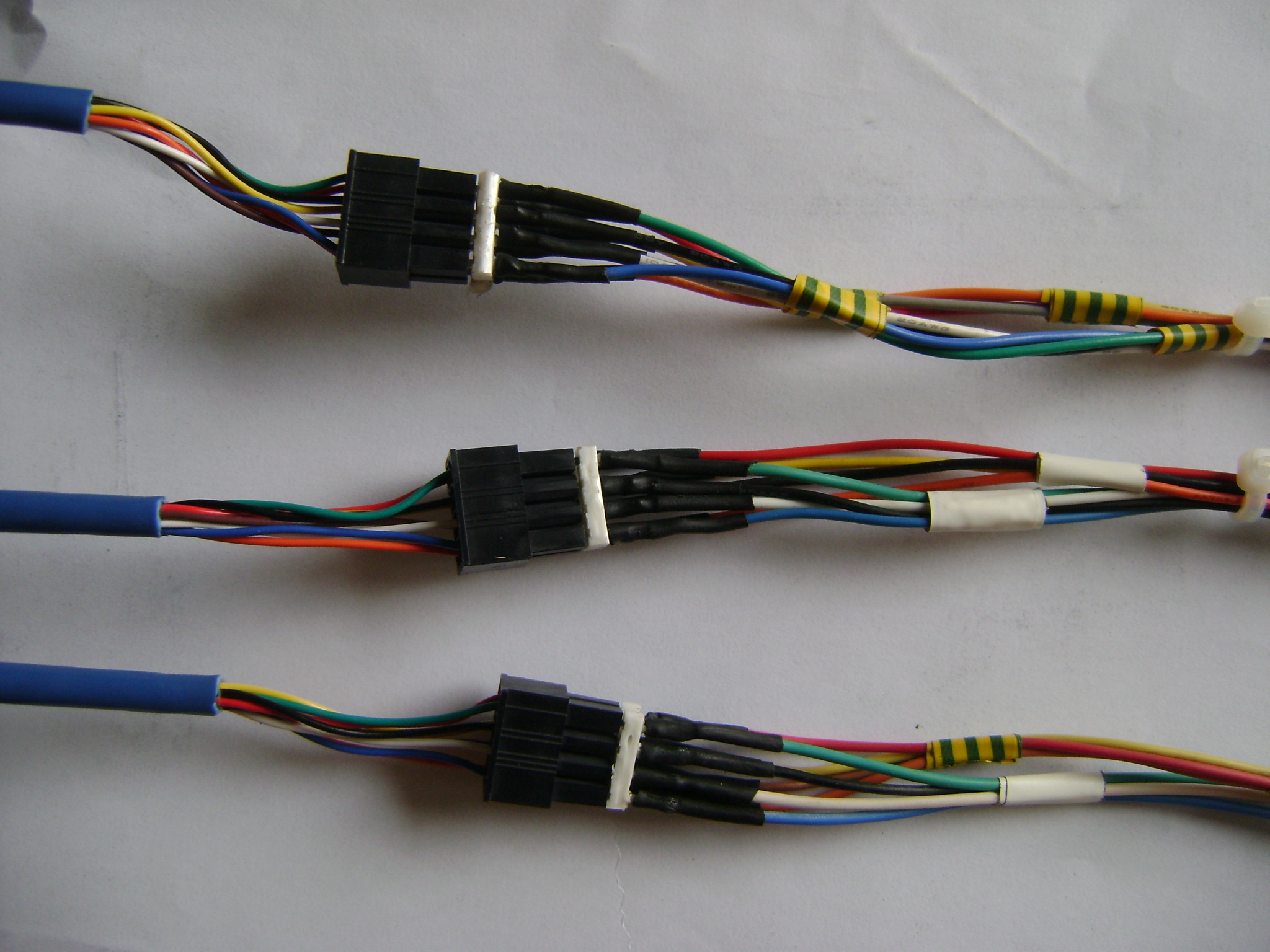
I have retested several times adapter that i hooked up to molex connector and everything was ok.
Connections are soldered and solid.Finaly i decide to cut it and connect teknic wires directly to new inline connector.
After sending G91 / G1 S2 X50 F1000 motor start to move slowly.The only thing i can think of is that the adapter wires ware to long and/or to big ( gauge)....
Am working on this for lat 6 hours, and after i changed HW and config for X times i found that mistake is general one.. Damn, i really need start to drink
") Thank you all for your comments !
Thank you all for your comments !Maybe i will need help with fine tuning but this is another story...
-
Go into Clearpath setup and lower the frequency, the motor will speed up. I like to run steps per mm in config.g around 200.
-
P.S. congratulations!!
-
Hi guys ! I had some login problems in the morning but now it's OK.
After vacation and battery recharge i can continue to work.There are few "problems" that i found during latest testing:
1.)
If i run G91 / G1 S2 X-50 F500 on the X axis motor, i get correct positioning and hand starts to lift, but..2.)
if i run the same command on Y axis, movement speed and positioning is totally different. In fact, i have to hit emergency stop because upper hand would hit the top of the construction. Funny part is that this will happen equal if i enter Y-10 or Y-1003.)
For some unknown reason i can not start motor on Z axis. I try to switch positions on different expansion board connectors and i rechecked all, but without luck. Btw. there are 3,3V on this connector so this should work.I have two power supply's. On one i have hooked X and Y motor and Z is on separate one.
I changed this too but nothing happened.At the moment, this is my current setting:
M669 K10 U380 L900 A-10:7.3 R15 H1000 B500 ; rotary delta
M669 X150 Y150 Z150 ; rotate +X direction by 150deg
M666 X0 Y0 Z0 ; endstop adjustments
M574 X2 Y2 Z2 S0 ; END STOP SWITCHES; Drives
M569 P0 S0 ; Drive 0 goes backwards
M569 P1 S0 ; Drive 1 goes forwards
M569 P2 S0 ; Drive 2 goes forwards
M569 P3 S0 ; Drive 3 goes forwards
;------------------------------
M569 P5 R0 T3:3:3:3 ; Drive X
M569 P6 R0 T3:3:3:3 ; Drive Y
M569 P7 R0 T3:3:3:3 ; Drive Z
M584 X5 Y6 Z7 E3:4
;-------------------------------
M92 X88.889 Y88.889 Z88.889 ; Set steps per mm
M350 X16 Y16 Z16 I0 ; Configure microstepping without interpolation
;-------------------------------
M566 X2000 Y2000 Z2000 E ; Set maximum instantaneous speed changes (mm/min)
M203 X100000 Y100000 Z100000 E0 ; Set maximum speeds (mm/min)
M201 X8000 Y8000 Z8000 E0 ; Set accelerations (mm/s^2)
M906 X2100 Y2100 Z2100 E800 I70 ;Set motor currents (mA) and motor idle factor
M84 S15 ; Set idle timeout..A.
-
I found error in clearpath setup so after reconfiguration i can use Z axis.
I have copy pasted main conf file to all motors and everything is working accept smooth movement. Btw. the same is happening when i test it in MSP setup. Shortly, motor start to move smoothly but after some 20 cm it starts to "shake". As if it would move every second or third step...Now,when i took a better look, it looks like that this shaking comes from micro stepping. The upper hand starts to vibrate when it moves up. Ofcourse, when i add lower hands (carbon tubes), everything looks like if it would shake... Edkirk mentioned 200 steps per mm ... Should this solve it ? Btw. am running rotary delta firmware..
A.