Worng homing on a CoreXY and totally wrong step/mm
-
@Veti said in Worng homing on a CoreXY and totally wrong step/mm:
have you read? this explains movements problems
https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareCoreXYPrinter?are you on firmware 3.1.1? check with m115
M350 X32 Y32 I0 ; configure microstepping without interpolation
M350 Z16 E16 I1 ; configure microstepping with interpolationunless there is a special reason you should got with X16 with interpolation on all axis
M92 X160.00 Y160.00 Z8000.00 E420.00 ; set steps per mm
z8000 that seems wrong.
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
B4138 is incorrect. look up the correct value in your thermistor documentation.
Good morning, yesterday I forgot to ask you why you said to use X16 and not X32....of course X32 only on X and Y axis....aren't X32 more "precise" than X16? Do you say X16 for possible motor's torque issues?
Thanks -
@the_dragonlord
duet wifi only allows for interpolation to x256 at x16.
in practice this become harder the higher the microstepping to be more accurate.
at x32 you are at around 5% the holding torque per microstep.in general the interpolation give you a better experience than the increased accuracy.
for a corexy machine, if you want real improvement, 0.9 degree motors make a big difference.
-
@Veti said in Worng homing on a CoreXY and totally wrong step/mm:
@the_dragonlord
duet wifi only allows for interpolation to x256 at x16.
in practice this become harder the higher the microstepping to be more accurate.
at x32 you are at around 5% the holding torque per microstep.in general the interpolation give you a better experience than the increased accuracy.
for a corexy machine, if you want real improvement, 0.9 degree motors make a big difference.
I already own two Wantai 0,9° stepper but I was afraid to loose too much torque....it is not like this? 0,9° stepper are a good choice?
-
@the_dragonlord
it depends on the steppers (their rating) and if you are on 24v.see the emf calculator here
https://www.reprapfirmware.org/i am running 0.9 degree steppers on my corexy.
-
@Veti said in Worng homing on a CoreXY and totally wrong step/mm:
@the_dragonlord
it depends on the steppers (their rating) and if you are on 24v.see the emf calculator here
https://www.reprapfirmware.org/i am running 0.9 degree steppers on my corexy.
I have 12V power supply...I made a configuration from the link you gave me....there are two parameteres wich I really don't know where to find the values: Phase resistance and Phase inductance, but wiht thees configuration I see that I will not start to loose torque until i'll reach 168mm/s that is a speed soooooo much higher than the maximum I'll print at...(tha chassis is a X5S chassis made of 2020 profiles). With this result I think I could use the 0,9° with no problem, right? In case I could increase the current....
Do you use the 0,9° even for the Z?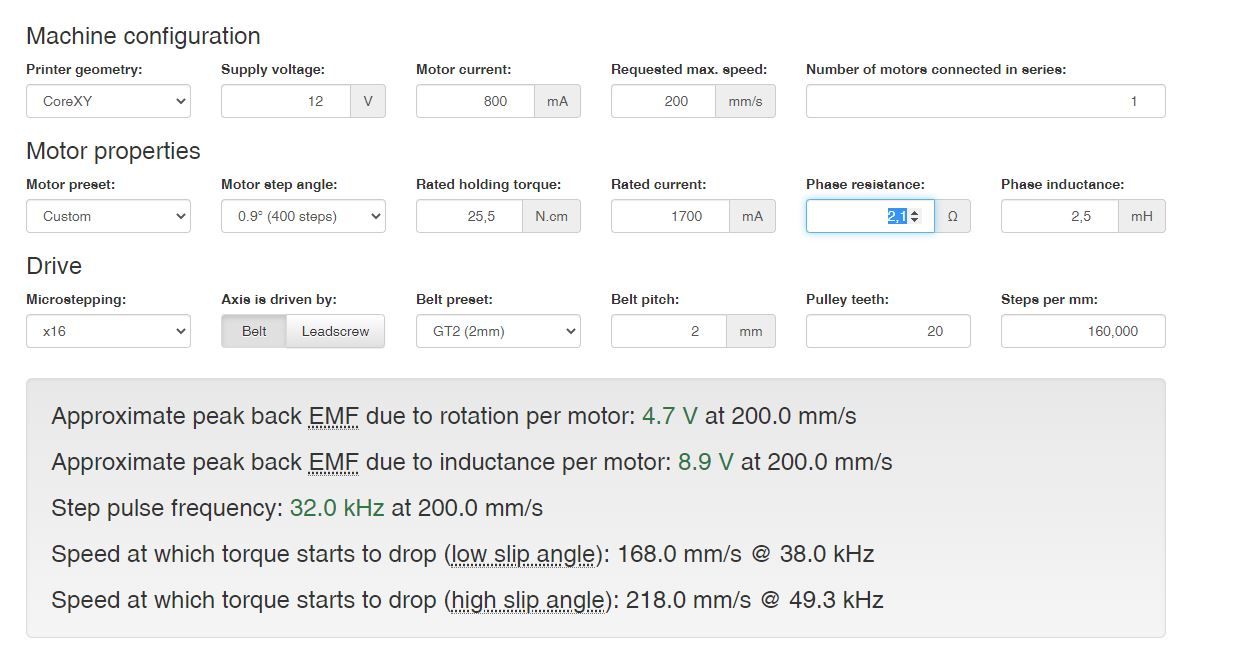
-
look on the motor for a part number and search google.
most of the times you will find a page with the information -
@Veti ok, I will....is your power supply 12 or 24V? Do you use 0,9° on Z axis as well?
Thanks! -
@the_dragonlord
24v and 0.9 are only on X and Y.
-
@Veti said in Worng homing on a CoreXY and totally wrong step/mm:
@the_dragonlord
24v and 0.9 are only on X and Y.
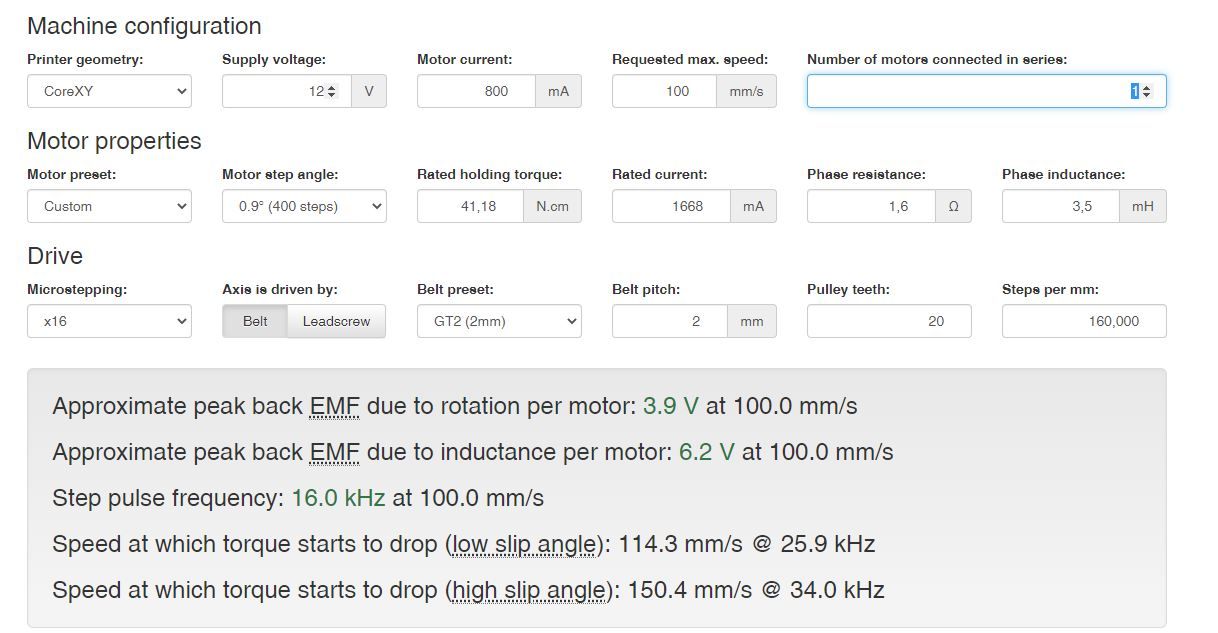
here's the configuration with the correct data for the stepper I own, what do you think about it?
-
looks ok
to be honest. if you already have the motors, why not give them a try? -
@Veti said in Worng homing on a CoreXY and totally wrong step/mm:
looks ok
to be honest. if you already have the motors, why not give them a try?yes of course, you mean to give a try to the 0.9?... first thing I'll choose 16x with interpolation! Thanks!