I2C on expansion board Duet3HC
-
@dc42 okay will define these micros.
monitor task for now just sending a command and receiving the datafor (;;) { TaskBase::Take(); if (running) { CanMessageBuffer buf(nullptr); // CanMessageAccelerometerData& msg = *(buf.SetupStatusMessage<CanMessageAccelerometerData>(CanInterface::GetCanAddress(), CanInterface::GetCurrentMasterAddress())); CanMonitorDataStart &monitorData = *(buf.SetupStatusMessage< CanMonitorDataStart>(CanInterface::GetCanAddress(), CanInterface::GetCurrentMasterAddress())); #if TEST_PACKING uint16_t pattern = 0; #endif /*if (accelerometer->StartCollecting(axes)) { }*/ if (monitor->readRangeSingleMillimeters() != 0) { data = monitor->readRangeSingleMillimeters(); monitorData.deviceNumber = 1; if (monitor->timeoutOccurred()) { debugPrintf("Timeout Error in monitor"); } } monitor->stopContinuous(); //stop sensor data*/ // Wait for another command running = false; } }uint8_t readReg(uint8_t reg) { uint8_t value; last_status = 0; //bus->requestFrom(address, (uint8_t)1); // value = bus->read(); return Transfer((uint8_t)reg, &value, 1, 1, VL53L0XI2CTimeout); }uint16_t readRangeSingleMillimeters() { startTimeout(); while ((readReg(RESULT_INTERRUPT_STATUS) & 0x07) == 0) { if (checkTimeoutExpired()) { did_timeout = true; return 65535; } } // assumptions: Linearity Corrective Gain is 1000 (default); // fractional ranging is not enabled uint16_t range = readReg16Bit(RESULT_RANGE_STATUS + 10); writeReg(SYSTEM_INTERRUPT_CLEAR, 0x01); return range; } -
@nikhil how do you set 'running' to true?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Init :--
Sensor *temp = new sensor(Platform::GetSharedI2C(), sensorxAddressLsb); // added false for default addressss if (temp == nullptr) { // debugPrintf("error creating sensor"); no use } if (temp->CheckPresent()) // returns hardcoded true As I was not having anything to check { if (!temp->init()) / { // waiting time should be less while initializing debugPrintf("not initializing the sensor\n"); //no use return; } // increase timing budget temp->setMeasurementTimingBudget(200000); monitor = temp; monitorTask = new Task<MonitorTaskStackWords>; monitorTask->Create(MonitorTaskCode, "sensor", nullptr, TaskPriority::Monitor); } else { delete temp; }Diagnostocs
# if SAME5x Platform::GetSharedI2C().Diagnostics(reply); # endifIn Command processing
Sending temperary Gcode M54 to make 'running = true'#if SUPPORT_I2C_SENSORS case CanMessageType::monitorData: requestId = buf->msg.monitorData.requestId; rslt = MonitorHandlerProcessing::ProcessStartRequest(replyRef); break; #endifGCodeResult MonitorHandlerProcessing::ProcessStartRequest(const StringRef &reply) noexcept { reply.printf("Inside monitor"); if (monitor == nullptr) { reply.printf("monitor %u not present", CanInterface::GetCanAddress()); return GCodeResult::error; } if (running) { reply.printf("Monitor is busy collecting data"); return GCodeResult::error; } running = true; monitorTask->Give(); return GCodeResult::ok; }first I use M54 B1 to start set 'running' = true and as soon as I do M122 B1 the response is given below and it stops the CAN communication. Means there's issue in implementing I2C client? is it?
M122 B1 Diagnostics for board 1: Duet EXP3HC firmware version 3.3beta2+1PB1 (2021-04-28 17:18:32) Bootloader ID: SAME5x bootloader version 2.3 (2021-01-26b1) Never used RAM 158396, free system stack 0 words Tasks: Move(notifyWait,160) HEAT(delaying,91) CanAsync(notifyWait,72) CanRecv(notifyWait,84) CanClock(notifyWait,74) Sensor(notifyWait,57) TMC(notifyWait,64) MAIN(running,438) AIN(delaying,260) Last reset 00:03:58 ago, cause: reset button Last software reset data not available Driver 0: position 0, 80.0 steps/mm, standstill, reads 41196, writes 11 timeouts 0, SG min/max 0/0, steps req 0 done 0 Driver 1: position 0, 80.0 steps/mm, standstill, reads 41198, writes 11 timeouts 0, SG min/max 0/0, steps req 0 done 0 Driver 2: position 0, 80.0 steps/mm, standstill, reads 41202, writes 11 timeouts 0, SG min/max 0/0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 10, peak Rx sync delay 188, resyncs 1, no step interrupt scheduled VIN: 17.2V, V12: 12.3V MCU temperature: min 39.0C, current 39.2C, max 39.4C Ticks since heat task active 77, ADC conversions started 238550, completed 238549, timed out 0, errs 0 Last sensors broadcast 0x00000000 found 0 82 ticks ago, loop time 0 CAN messages queued 25, send timeouts 0, received 1167, lost 0, free buffers 36, min 36, error reg 0 dup 0, oos 0, bm 0, wbm 0 Error: M122: Response timeout: CAN addr 1, req type 6024, RID=52 ok -
@nikhil have you defined all 3 of the I2C handlers? If not then the transmit interrupt will get stuck in the dummy handler.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Yes I've defined all 3 handlers but the function calling inside handler is same. The interrupt function.
in config.h
#define I2C_HANDLER0 SERCOM4_0_Handler // Handler for Interrupts all the handlers #define I2C_HANDLER1 SERCOM4_1_Handler #define I2C_HANDLER3 SERCOM4_2_Handlerin Platform.c
void I2C_HANDLER0() noexcept { Platform::sharedI2C->Interrupt(); } void I2C_HANDLER1() noexcept { Platform::sharedI2C->Interrupt(); } void I2C_HANDLER3() noexcept { Platform::sharedI2C->Interrupt(); }M122 B1 Diagnostics for board 1: Duet EXP3HC firmware version 3.3beta2+1PB2 (2021-04-28 18:44:42) Bootloader ID: SAME5x bootloader version 2.3 (2021-01-26b1) Never used RAM 158396, free system stack 0 words Tasks: Move(notifyWait,160) HEAT(delaying,99) CanAsync(notifyWait,72) CanRecv(notifyWait,84) CanClock(notifyWait,74) VL53L0X(notifyWait,57) TMC(notifyWait,64) MAIN(running,442) AIN(delaying,260) Last reset 00:00:28 ago, cause: software Last software reset data not available Driver 0: position 0, 80.0 steps/mm, standstill, reads 17991, writes 11 timeouts 0, SG min/max 0/0, steps req 0 done 0 Driver 1: position 0, 80.0 steps/mm, standstill, reads 17994, writes 11 timeouts 0, SG min/max 0/0, steps req 0 done 0 Driver 2: position 0, 80.0 steps/mm, standstill, reads 17998, writes 11 timeouts 0, SG min/max 0/0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 7, peak Rx sync delay 183, resyncs 1, no step interrupt scheduled VIN: 17.2V, V12: 12.3V MCU temperature: min 39.2C, current 39.2C, max 39.2C Ticks since heat task active 239, ADC conversions started 28984, completed 28984, timed out 0, errs 0 Last sensors broadcast 0x00000000 found 0 244 ticks ago, loop time 0 CAN messages queued 25, send timeouts 0, received 119, lost 0, free buffers 36, min 36, error reg 0 dup 0, oos 0, bm 0, wbm 0 Monitor is available okI2C section is not printing.
-
@nikhil, it's hard for me to comment further without seeing all the code.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thanks for the help. May be sensors function has problem will check those. Will add remote M260 for 3HC V1.0 with changes and contribute in 3HC's firmware.
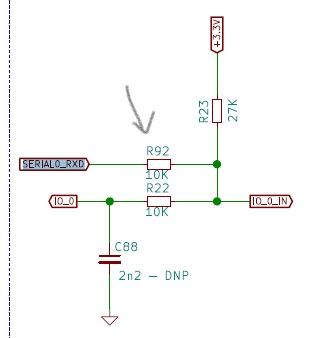
I've bypassed the resistor R22. To get PA17 is it correct one.
-
Hi @dc42 , I went through the code and made changes. the module is working as I can see
I2C bus errors 0, naks 69, other errors 0 I2C device address 0x29facing no acknowledgment. I'm using 0x29 address for the slave (sensor Adafruit VL53L0X) the same address I tried with arduino that's working fine. Can it be because of hardware. Or while sending data fast voltage is not reaching 3.3v or more?
-
@nikhil I suspect it is a firmware issue. Have you published your fork on github? Did you add external 4K7 pullup resistors to +3.3V, or does your I2C device already have those?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 It's working I changed the resistor as you said. I'll publish the fork. It was firmware issue.
-
@nikhil
Hi,
I'm struggle with similar problem to connect i2c sensor to expansion board Duet3HC.
Could you publish your fork on github?
Thanks in advance