adding manual controlled steppers
-
Hi,
I searched around but could not find a clear answer for my question.
I'd like to know if there is an option to manually trigger/move additional steppers during a print based on gcode commands or macros.
Two examples:- I would like to run a stepper motor for adjusting external parts. The motor is not involved into the printer kinematic
- I would like to run a second extruder motor (for T1) to prime a nozzle while the print with T0 is still ongoing.
Would that be possible?
Regards,
Andy -
to precise my request:
Currently I am running my machine via klipper. I am moving to Duet because klipper has severe multi gantry limitations.
But I do have one issue left: My machine requires the adjustment of an external filament device during printing without stopping the print. Speaking in reprap language that would mean an additional one motor Independent axis I guess.
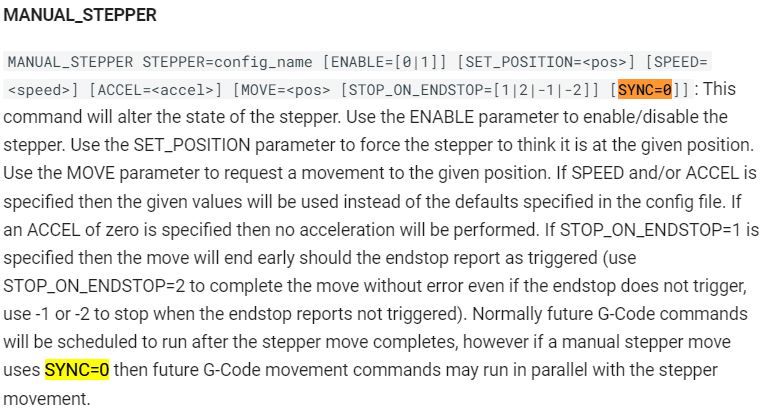
In klipper this is named manual stepper and looks like this:
-
@slaughter2k currently the only way to do that in RRF would be to configure that stepper motor as an independent motion system in RRF 3.5 (under development) so that you can control it asynchronously with respect to the main motion system. However, I understand that you also want to run two motion systems. So you would need a version of RRF that supports three motion systems in all.
The current RRF 3.5 dev branch supports just two motion systems, but we can look at increasing that to three on the Duet 3 MB6HC board once we have released 3.5beta1.
-
ok, I feared that it would be like that currently.
I am thinking of a simple workaround via an external arduino(?) with stepper driver. The external motor has just to be able to home itself and drive to 9 different positions.
--> Is there a way that a gcode would trigger an external device (arduino?). I just thought ofM118: Used to send messages to a specific target: USB, PanelDue/UART, HTTP or Telnet
--> M118 P2 S"home" ;send home signal via UART to external arduino
--> M118 P2 S"0" ;send position 0 via UART to external arduinoM118 P5 would work in addition for Due 3 and second UART interface, right?
-
@slaughter2k do you need to run the additional stepper motor while the machine is printing, or only when it is not printing? If you only need to run it when the machine is not printing or when the print is paused, then you could simply configure it as an additional axis.
You could use M118 as you suggest for sending messages to an Arduino.