DUET 3D MAINBOARD 6HC WIRING
-
Hi,
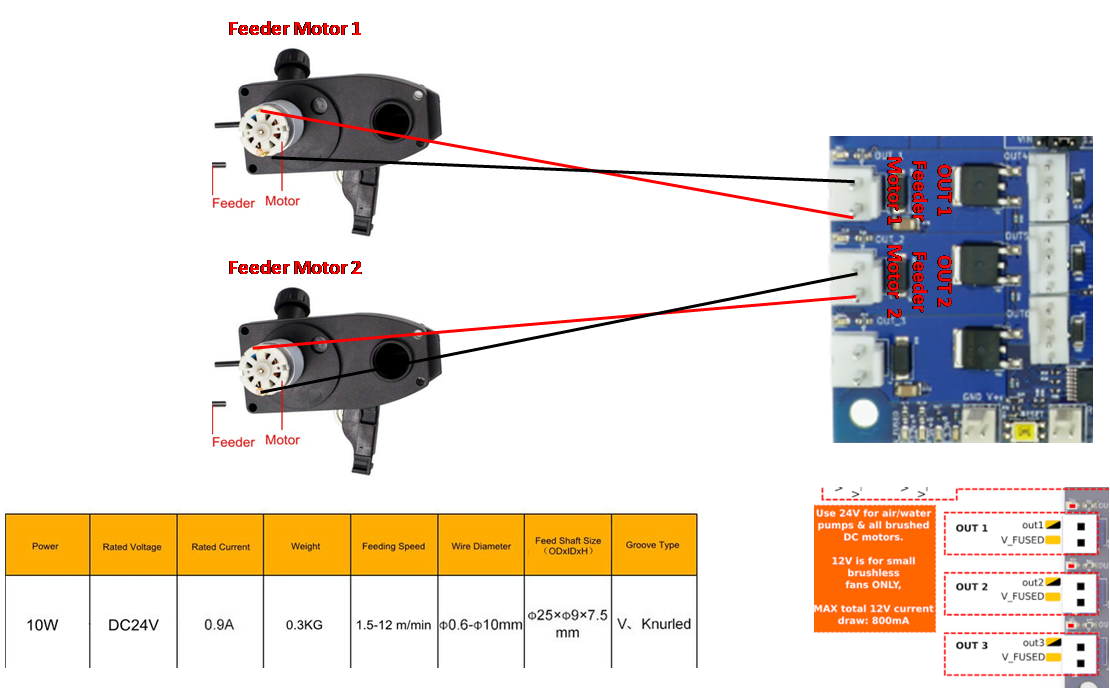
I am connecting two feeder Motors which are 24V each to OUT 1 & OUT 2 Pin's of Duet 3D Mainboard 6HC. Attaching the picture's of component and wiring diagram for the same. Requesting your feedback for the following queries.
Query 1 : Would the Wiring diagram suffice the purpose? Or Since it is 24V Should the jumpers be used to ensure 24V is supplied to the motor
Query 2 : Speed of the feeder motor i.e., feeding speed has to be varied from 1.5 ~ 12 m/min. How can I Set/vary the speed of the feeding motor?
-
- The 12v/VIN jumpers apply to the low current outputs OUT4 to OUT9 only. The high current outputs OUT1 to OUT3 are ways fed with VIN.
- If those are brushed DC motors then you can use PWM to control the speed. Use the M950 command to configure them as general purpose outputs, then use M42 commands to control the speed.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thanks for the feedback