Mitsubishi MR-E-70AG-KH003 servo apmlifiers and a Duet board
-
Hi,
anyone running a Duet board (preferably a 6XD) with any of these MR-E-***AG-KH003 servo amplifiers? -
@Anon1337 what step/direction enable inputs do those servo controllers have?
-
@T3P3Tony I believe it only has analog inputs unfortunately.
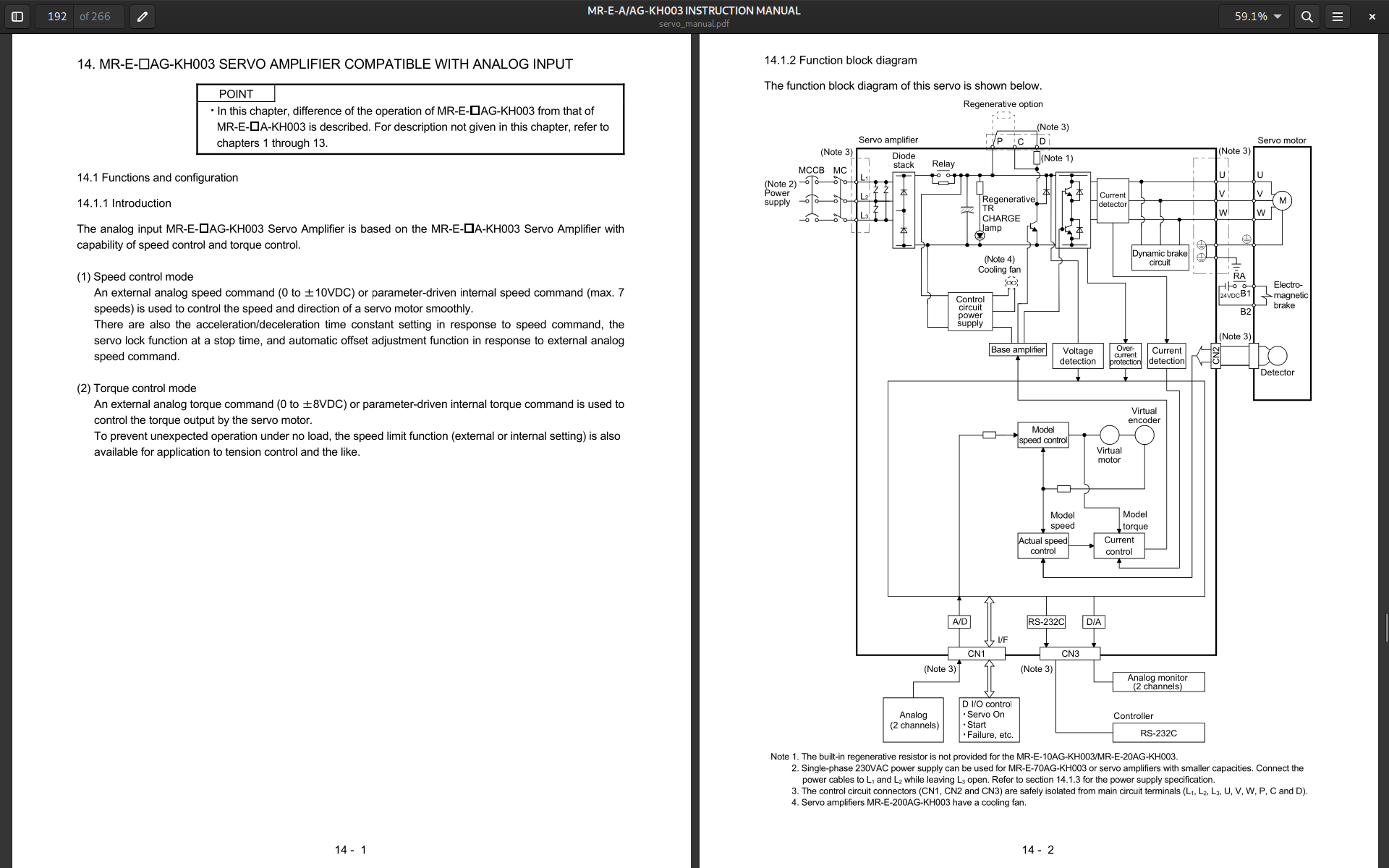
I can't upload the manual here because it's over the 4MB limit.
-
@Anon1337 then those are not directly compatible with the 6XD. you could use a PWM output via VFD style controller to get 0-10V, but it depends what you want to use the servos for.
-
@T3P3Tony understood.
What if I went a different route and swapped the servo motors for a closed loop steppers with something like the CL86T closed loop driver? As this thing accepts 5V step/dir commands this should work without a hitch, right? Or better yet for a different servo controller like the T6-750RS.(now I know this is a power/quality downgrade)
-
@Anon1337 the 6XD provides step/direction single ended outputs at 5V so that should work fine
-
@T3P3Tony I wonder with AC servo drivers how well do dual Y axis motors (parallel/serial motors, dual gantry motors, people call this setup by so many names it makes my head spin) work? Will they home well?
I see there is a new-ish board (1HCL) that's specifically made for the (upcoming?) closed loop stepper motor and that it works when used as such (at least on the 3.5 beta FW). But what about external controllers (such as the AC servo drivers)? I can find very little info on that. -
@Anon1337 the 1HCL will work with a wide range of 4 wire bipolar stepper motors with encoders (up to 6.3A RMS). We recommend using stepper motors with 1.8 degree step angle and an encoder with >1000PPR/4000CPR.
The 23CL builds the Duet 3 expansion board control technology + encoder into the motor casing itself( with an optional brake) so a 1HCL is not required - it can be connected directly to the CAN-FD bus.
For external controllers I recommend you use the 6XD to produce step/direction signals and select controllers that can accept these. The 1XD also allows connection to these sorts of controllers.
Whenever you have multiple motors moving the same gantry you need to take precautions to avoid the gantry getting out of tram. you can set the homing files up to move both motors at once when homing and ensure both sides of the axis touch off the homing switches before homing finishes. the 6XD and 1XD also have inputs for the "alarm"/"error" outputs that many closed loop external drivers have that should be connected and dealt with appropriately, for example, stop homing if the alarm on one or both motors are triggered.