PID Tuning for Unconventional Heater
-
Hello,
I have a high-temp (very high-temp) printer that uses a (reflector plate) directional IR/radiant heater that directs heat towards the active print. I use a zone RTD temperature sensor to monitor the active Z plane. In addition, there is a high-heat build plate that is set to 180-200°C.The challenge is that when the active reflector plate gets closer to the build plate, the current PID (settings below) cause the temperature to overshoot and are slow to fall to the set temperature. I am not having heater faults, however the temperature overshoots 10-20°C.
Any suggestions of how to manually fine tune the current settings to be more stable and maintain temperature closer to the set temp +/- 3°C are welcomed.
I have referenced the Tuning the heater temperature control for help and it is close, but not close enough.
M307 H2
Heater 2: heating rate 0.763, cooling rate 0.453, dead time 7.50, max PWM 1.00, mode PID
Predicted max temperature rise 147°C
PID parameters: heating P31.2 I0.832 D163.8, steady P31.2 I1.632 D163.8 -
@tmreith said in PID Tuning for Unconventional Heater:
The challenge is that when the active reflector plate gets closer to the build plate, the current PID (settings below) cause the temperature to overshoot and are slow to fall to the set temperature. I am not having heater faults, however the temperature overshoots 10-20°C.
Are you saying that the distance between the reflector plate and the bed varies, and also that you are performing initial bed heating with the radiant heater turned on?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in PID Tuning for Unconventional Heater:
Are you saying that the distance between the reflector plate and the bed varies, and also that you are performing initial bed heating with the radiant heater turned on?
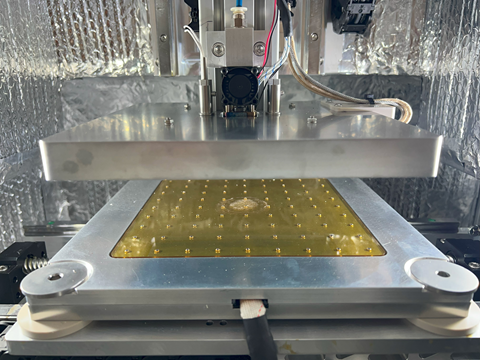
Yes, the reflector plate moves toward/away from the build plate. Yet, stays constant with the active extrusion plane. I have provided an image below.
There is very minimal air flow in the chamber and the sensor readings are stable.
The challenge is, as the reflector plate increments upward or towards the build plate, the relationship between the build plate and reflector plate changes. Also note that the build plate also acts as a reflector of some sort too.
The PID control properly request a blip of energy to bring the environment to the target temperature. There is a slight overshoot at this initial request. The PID control will pause and allow the environment temperature to drop towards the target temperature. This is all working great!
However, as we get closer to the set temp, the PID control will have small blips of energy requests for a "soft landing". This works great for traditional heating sources. In our case, the reflector plate emits high energy pulses of IR and radiant heat, so each time the PID control blips for a soft landing, the environment jumps 5-10c. Thus, slowing the recovery time.
An ideal behavior, would be that the PID control would allow the temperature to drop slightly below the target and reduce the amount of blips to allow the environment to stabilize more quickly.
-
SOLVED - used conditional gcode to control print zone. Reverted back to sensor attached to heater source. This provides a more stable control for the heater.
The conditional gcode reads multiple zone sensors to determine the adjustment needed to drive the heater.
Thanks for reviewing the post. -
 undefined dc42 marked this topic as a question
undefined dc42 marked this topic as a question
-
undefined dc42 has marked this topic as solved