New idea: SCARA-cartesian hybrid
-
Hi everyeone,
I have this new idea with supersimple mechanics!So I would like to build a big printer (2000x500x500mm) as simple as possible.
Therefore I am playing with the idea of putting only the proximal part of a SCARA arm on a big rail. This arm will have a belt that will serve as the 3d axis (!)
This means the extruder can reach more or less the colored zone:
Is this currently possible with RRF? I don't think so if I read the SCARA documentation.
Maybe I should set the distal arm length at 0, but then how do I configure the proximal arm having an axis also?I have built cartesian printers with Duet3D before, so some experience already.
-
@fromwastetowind that kinematics is not currently supported, but could be added with a little work. I think you could approximate it by treating the arm as the distal arm and configuring a very long proximal arm in RRF, so that rotation of that proximal arm causes the distal joint to approximate linear movement in the X direction.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42
Thanks for the idea @dc42. It think it is valid indeed, except the code probably assumes that the movement of the proximal joint also moves the proximal arm in the y direction. Although it will be linear because of the length, I think there will still be some movement.. distorting everything?
Maybe it's simpeler to work with absolute x-y coordinates in the gcode and convert them to polar? Each component of the polar coordinate (angle and radius) would match the movement needed for the rotating axis (arm), and the belt axis. This also seems not to hard to implement? What do you think?
-
@fromwastetowind I think we've seen a crane style polar printer before on the forum. let me dig.
-
https://forum.duet3d.com/topic/33630/polar-printer?_=1733607004803 is one; I remember another
EDIT: This one! https://forum.duet3d.com/post/143468
<>RatRig V-Minion Fly Super5Pro RRF<> V-Core 3.1 IDEX k*****r <> RatRig V-Minion SKR 2 Marlin<>
-
@fromwastetowind you can configure the degree of interaction between the proximal arm and distal arm angles. Use the C parameter of the M669 command for this.
Alternatively you could add this kinematics to the firmware. See https://github.com/Duet3D/RepRapFirmware/wiki/Adding-New-Kinematics.
-
@oliof That's exactly what I mean! Indeed it works like a crane, I did not realise it yet.
But appearently this just works with the polar kinematic systems which is already programmed. Do I replace the bed joint/rotating axis with the arm joint in config.g?
(I am trying to reach Oliverracing for his config.g but he does not seem active anymore.) -
@fromwastetowind said in New idea: SCARA-cartesian hybrid:
Do I replace the bed joint/rotating axis with the arm joint in config.g
that's what I would try.
-
@oliof Ok, thanks. Am I right to think that the print object must always be placed off-center, because the vertical axis is in the way? I made a drawing to show what I mean:
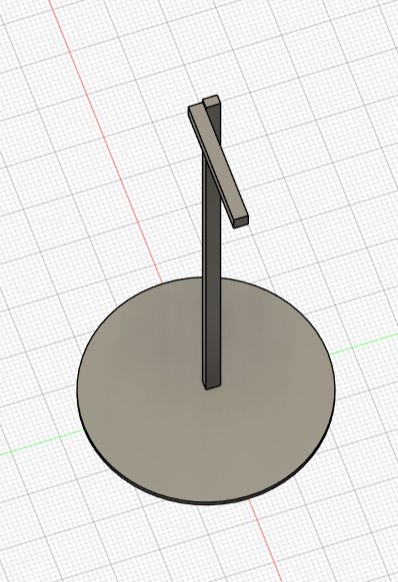
I don't see an option really to set this with M669 parameters. -
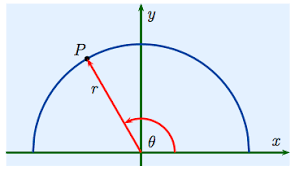
@fromwastetowind I think this is an 'inverse' Polar printer, and it is irrelevant to the firmware if it is the crane that rotates or the bed. The nozzle just needs to travel along a line drawn between the centre and the circumference, ie along a radius line.
See https://docs.duet3d.com/User_manual/Machine_configuration/Configuration_Polar
Apart from the links already mentioned, there was a similar printer design (though running on a hacked version of Klipper) at SMRRF: https://www.youtube.com/live/Hlw3mt-x0nE?si=amwlz8DMR0daYQjS&t=1437
You should be able to put a print anywhere on the bed, just not in the centre. M669 Raaa:bbb defines the minimum and maximum radius in mm.
Ian