Wiring up External DQ542MA Stepper Motor Driver
-
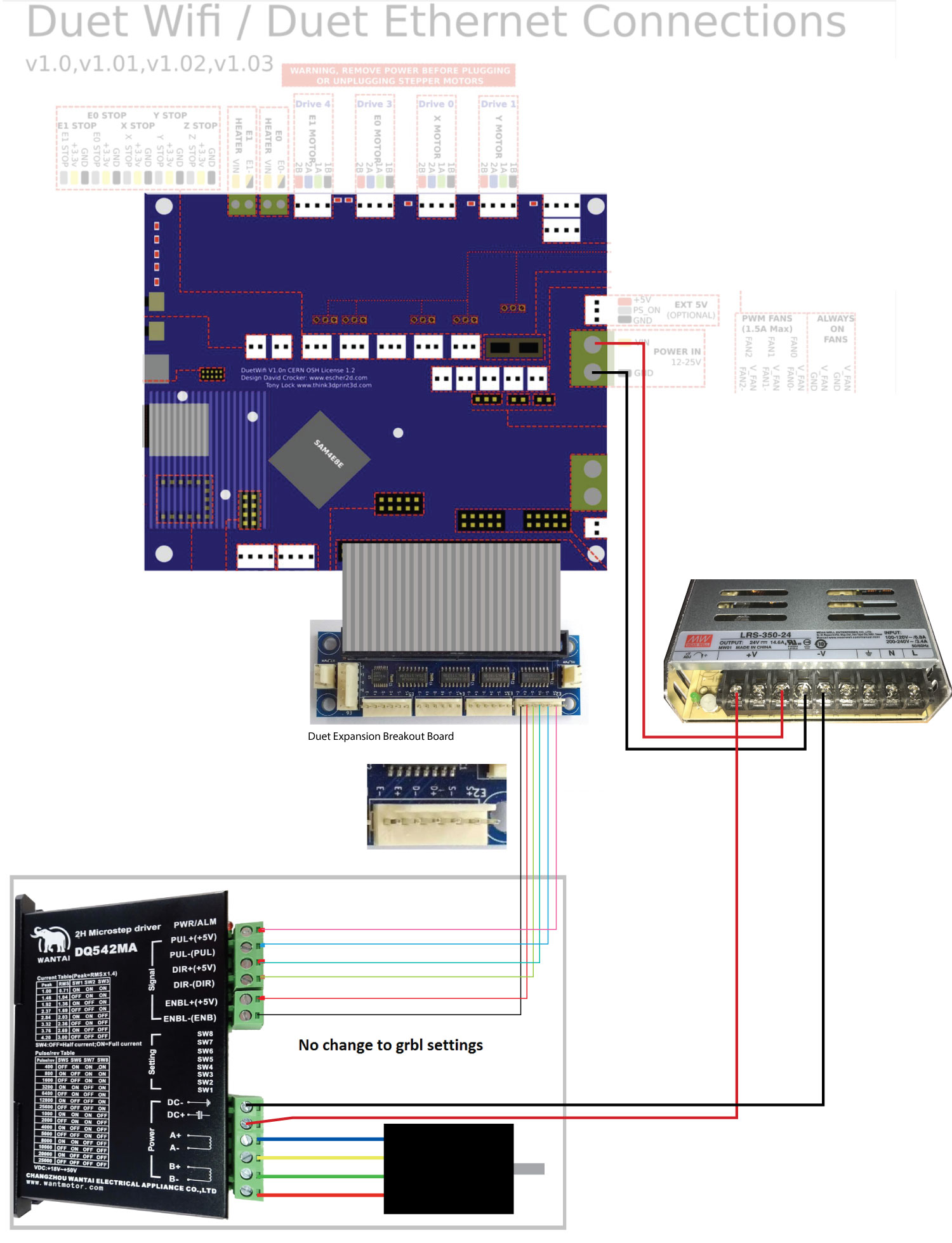
I would like to wire up an External DQ542MA Stepper Motor Driver to the DuetWifi to run some tests for CNC use.
https://makerparts.ca/products/dq542ma-stepper-motor-driver
http://www.wantmotor.com/product/dq542ma.html
looking for a "fool proof" way to easily connect these two
Appreciate any help -
Have you seen the wiki page about connecting external stepper drivers?
-
I did dig around the wiki
here is the configuration i think should work.let me know if you have any concerns

-
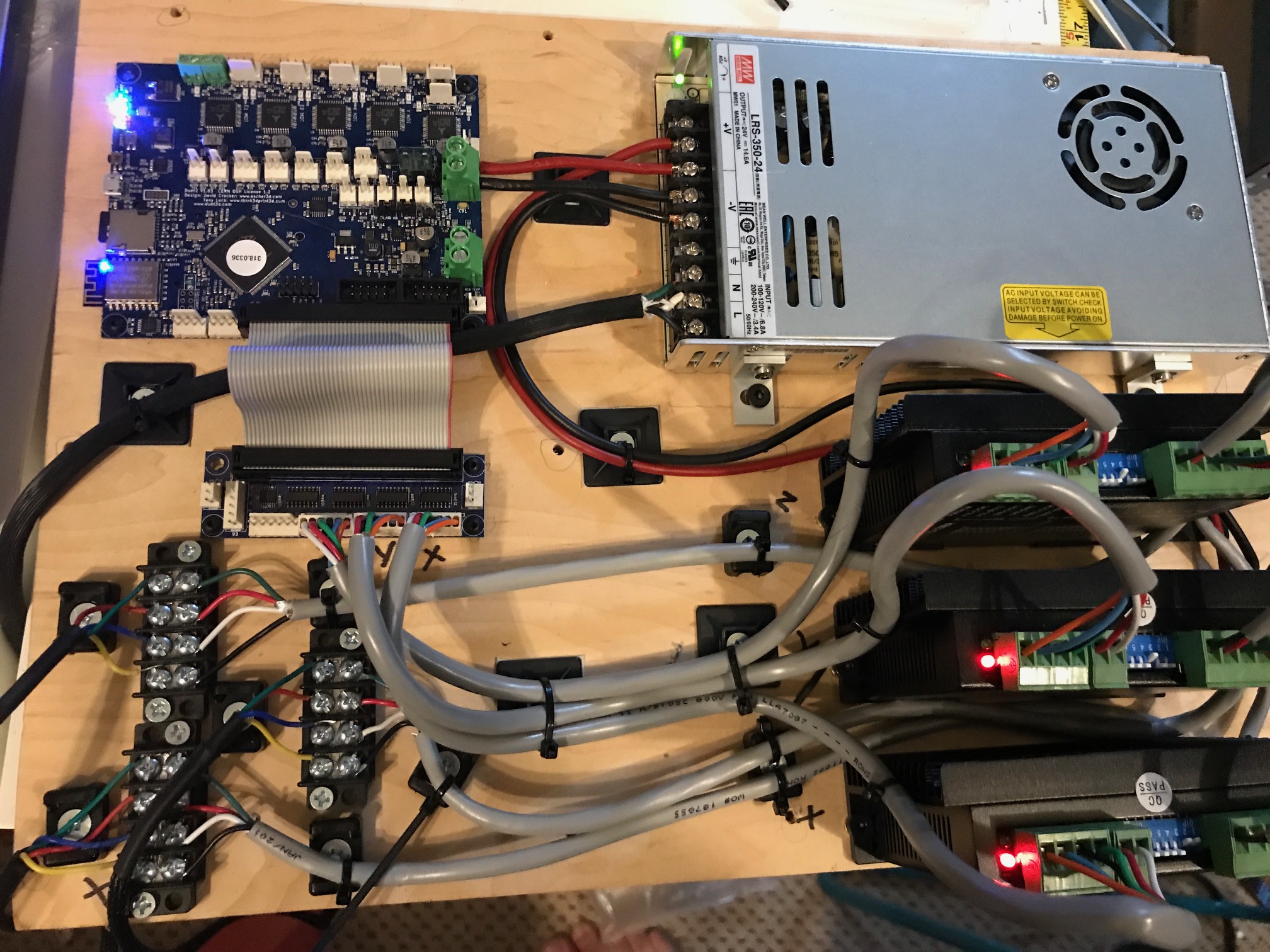
Ok i am not sure whats up.. at first i wired up one.. seemed fine, but now after i wired up all three
when i turn it on and try to move the steppers.. they Hold strong, but dont move.DQ542ma are being powered from one set of 12GA wires. and then split into three (one for each driver)
every thing is mounted to a wood board.. could this be a grounding issue?Red light shows on DQ542MAs
error code says
Motor doesn’t run, but maintains holding torque
Without input pulse signal
Adjust PMW & signal levelon DuetWifi firmware i have the driver configured like this
M569 P5 S1 T5:5:5:0for pulse timings


-
My Current config
[[language]]
; General preferences
M111 S0 ; Debugging off
M453 ; CNC mode
G21 ; Work in millimetres
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves
M555 P2 ; Set firmware compatibility to look like Marlin
M564 H0 ; allow movement before homing; Automatic saving after power loss is not enabled
; Endstops
;M558 P5 H5 F100 T2500 ; Set Z probe type to switch and the dive height + speeds
;G31 P600 X0 Y0 Z39.55 ; Set Z probe trigger value, offset and trigger height
;M557 X15:300 Y15:300 S20 ; Define mesh grid; Drives & Axis
;
; Define axis X on drive 5, axis Y on drives 6, axis Z on drive72 and dummy axis U on drive 9
; Show only axis X, Y and Z
M584 X5 Y6 Z7 U9 E1:2:3 P3
;
; Set stepper drives parameters for all the used ones
M569 P5 S1 R0 T5:5:5:0 ; Drive 5 goes forwards (E2 on Expansion Header)
M569 P6 S1 T2.5:2.5:5:0 ; Drive 6 goes forwards (E3 on Expansion Header)
M569 P7 S1 T2.5:2.5:5:0 ; Drive 7 goes forwards (E4 on Expansion Header);M906 X2000 Y2000 Z2000 U2000 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
;
; Set axis dynamic parameters
M92 X200 Y200 Z400 U400 ; Set steps per mm
M350 X16 Y16 Z16 U16 ; Configure microstepping with interpolation
M566 X900 Y900 Z12 U900 ; Set maximum instantaneous speed changes (mm/min)
M203 X2500 Y2500 Z2500 U2500 ; Set maximum speeds (mm/min)
M201 X150 Y150 Z150 U150 ; Set accelerations (mm/s^2)
;
; Set axis travel distances
M208 X-300 Y-300 Z-100 U0 S1 ; Set axis minima
M208 X300 Y300 Z200 U515 S0 ; Set axis maxima
;
; Set axis endstops
;M574 X1 Y1 Z2 U1 S1 ; Set active high endstops
;M581 X Y Z U S1 T0 C0 ; Enable endstop triggers while machining; Heaters
M140 H-1 ; Disable heated bed; Tools
; Network
M550 CbeamMac ; Set machine name
;M540 P0xBE:0xEF:0xDE:0xAD:0xFE:0xED ; Set MAC address
M552 S1 ;enable wifi
;M552 P192.168.0.121 S1 ; Enable network and set IP address
;M553 P255.255.255.0 ; Set netmask
;M554 P192.168.0.1 ; Set gateway
;M586 P0 S1 ; Enable HTTP
;M586 P1 S0 ; Disable FTP
;M586 P2 S0 ; Disable Telnet; Fans
;M106 P0 S0.3 I0 F500 H-1 ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off
;M106 P1 S1 I0 F500 H T45 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on
;M106 P2 S1 I0 F500 H T45 ; Set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned on; Custom settings are not configured
; Miscellaneous
M501 ; Load saved parameters from non-volatile memory; Change to workplace coordinates set 1
G54G92 X0 Y0 Z0
-
How are you trying to make the motors move? Are there any messages on the GCode Console? Don't forget that firmware 1.21 doesn't allow normal axis movements before homing, unless you send M564 H0.
-
my config.g has the M564 H0 in it.
things are moving now. but to be honest i am not sure what i changed to make it happen.. it just started working.. which is concerning.. as to why it wasnt before.
is there a buffer/cache that holds old settings
This is my current setup
M584 X5 Y6 Z7 U4 E1:2:3 P3
;
; Set stepper drives parameters for all the used ones
M569 P5 S0 R1 T6:6:5:0 ; X AXIS Drive 5 goes forwards (E2 on Expansion Header)
M569 P6 S0 R1 T6:6:5:0 ; Y AXIS Drive 6 goes forwards (E3 on Expansion Header)
M569 P7 S0 R1 T6:6:5:0 ; Z AXIS Drive 7 goes forwards (E4 on Expansion Header); Set axis dynamic parameters
M350 X1 Y1 Z1 U1 I0 ; Configure microstepping NO interpolation
M92 X200 Y200 Z200 U400 ; Set steps per mm
M566 X900 Y900 Z200 U900 ; Set maximum instantaneous speed changes (mm/min)
M203 X2000 Y2000 Z2000 U2500 ; Set maximum speeds (mm/min)
M201 X150 Y150 Z150 U150 ; Set accelerations (mm/s^2)