Splitting Stepper Drivers
-
The work from home situation has revived my interest in making a two tiered delta flying extruder set-up. Two motors, belts, and carriages per tower (i.e. no shared components for forces to transfer through) the upper arms carry the extruder the lower arms the usual smart effector, and mirrored movements between the motors of each tower would keep the "flying" extruder just above the effector (using same length arms and carriages, etc.) I have enough spare parts, including arms, to make this work without spending anything, or at least not much.
My original plan was mirror axes and use fresh drivers for the new carriages (with a duex3/5) but now I'm wondering if I just wire the motors in series to the single driver, if that'd work. I'm on 12v (but going to 24 would prob cost less than a duex3), and I'm a delta fan specifically for printing as fast as possible (i.e. a loss of torque or anything might be especially noticed printing at 150+mm/s).
Any thoughts on this approach? Should I just go duex and map them to new drivers?
-
Even better... a fourth tower that exactly matches the Z of the effector. Specifically for flying extruders. Already in Duet Firmware.
https://forum.duet3d.com/topic/7570/flying-extruder-with-4th-axis/93
-
I'm aware of this approach, I'm the one who asked for it in 2017 lol:
https://forum.duet3d.com/topic/2568/crazy-flying-extruder-idea-92?_=1585612263880But, not what I'm trying to do with this build. It's better than a fixed extruder certainly, but I'm trying to get it to follow on all planes, and it'd be pretty straight-forward too, just not sure if splitting all the drivers is going to be too demanding.
-
Got it! That would be kinda cool.
-
@clearlynotstef said in Splitting Stepper Drivers:
Two motors, belts, and carriages per tower (i.e. no shared components for forces to transfer through) the upper arms carry the extruder the lower arms the usual smart effector, and mirrored movements between the motors of each tower would keep the "flying" extruder just above the effector
If there is really no difference in the kinematic... none whatsoever... how about two carriages on each belt? If the feeling is this would might be a downside with regard to more mass on the single motor, then put identical motors at the top and bottom of each belt. It certainly isn't going to overwhelm a 9 mm, reinforced, belt.
Drive the motors from extra drivers, with existing duet Xn:n syntax.
Thoughts??
This seems intriguing enough to me that I may order an extra set of robotdigg corners, so I have two sets that can carry motors. My big delta is built from these, motors on top at the moment. Then a 6HC has six drivers right on the board, and a toolboard could fly around with the extruder. Hmm....
-
Does anyone have thoughts on the torque loss I can expect to experience if I split all 3 of my towers' drivers?
-
@clearlynotstef If you wire them in series, the driver should sort out the voltage for each motor to hit the required current setting. However, as the voltage will double, you'll want to run it on the highest VIN voltage you can, ie 24V. If you wire the motors in parallel, you halve the current per motor, though the voltage will stay the same. So you will have to double the motor current settings, assuming the stepper drivers can cope with that.
I think you will have a torque drop-off wired in series at high speed, which won't happen if wired in parallel. But how much and when, I really don't know.
Ian
-
This was taken from an article on series/paralle/unipolar within one motor; the basic physics still apply.
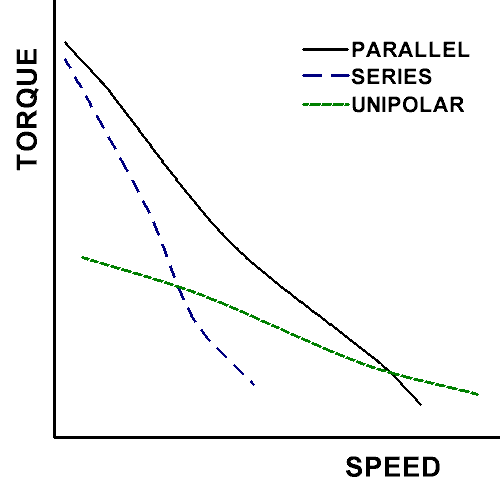
Parallel is almost always 'better', assuming you can set the driver to a current that results in the motors doing what you want.
-
What is the motivation for this? Is it to retain the dynamic performance of the delta effector while greatly shortening the Bowden extruder? If so, surely by approx doubling the moving mass while using the same linear guides and structure and move profiles you risk dropping the lowest resonant frequency of the end effector by about 40%?
Would it not make more sense to stiffen-up the components in the dynamic load loop instead, and just mount a direct-drive extruder to the end-effector? You could use top and bottom parallel motors for sure, or you could:- switch to steel-reinforced AT3 or AT5 belts and pulleys and NEMA 23 400 step/rev motors.
- substitute linear guide profiles that are far stiffer in bending, and do a little triangulation between them if possible
- replace delta link plastic or magnetic ball joints with either high articulation metal ball joints or universal joints
- triangulate the main structure to react tower bending and shear loads down into the base.
It seems to me that this sort of issue is a fundamental weakness of Delta printers, because the delta arms are attached to the structure near the top, not near ground level. Unless the structure is also redesigned for larger loads, how does separating the payload into two closely-spaced components moving in parallel going to address the underlying problem?
Tony
-
@Tony-Owens basically I it comes down to different takes on what would cause artifacts. I do not think my frame will cause issues. It's all 2040, not particularly big, metal corners, strapped tightly to the table with ratchet straps, and gains some additional stability from the 6mm Plexi attaching each tower to both neighbors the whole length of the tower. My thought is I'd best minimize artifacts by minimizing the moving mass on the effector/arms/belts. I'm currently using a flying effector attached via elastic to the carriages and happy with the results but want to see how fast I can get quality prints, and that bouncing on mass isn't going to help at higher speeds. This plan takes keeps the Bowden very short, but moves the mass of the extruder to a completely separate motion system. I'd share 2040 but otherwise it's weight is not shared to the hotend, different belts, arms, carriages and rods. I don't think sharing a frame is going to impact the effector personally, but am always open to other views!