XY movement corrections for non-parallel dual gantry machine
-
I am currently working on a machine with two gantries. However, getting both gantries perfectly parallel will be very hard, so I am looking for some alternatives. The idea was to correct the non-parallelism by altering the motion equations, i.e. the motors will correct any movement error resulting from the non-parallelism. In fact, I'd need a linear correction along the whole axis, as shown in the following figure:
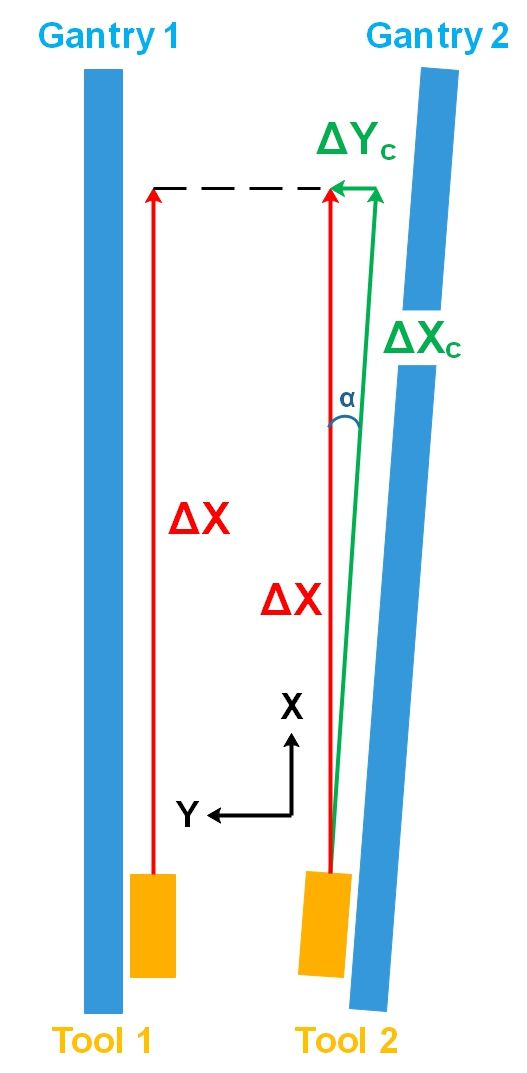
In order for tool 2 to carry out the exact same path ΔX as tool 1, it will need to carry out two correction movements ΔXc and ΔYc (where ΔXc > ΔX). Note that for better readability I exaggerated both with the non-parallelism and the size of the vectors. Imagine the vectors infinitesimal small (or as small as the microstepping allows it).
Is there a way to do this with the Duet3 and where in the config.g would I add these corrections? I have read about the IDEX calibration process which is similar but not the same since both tool sit on the same rail and you only need an offset correction.
-
Best to find a way to make the two gantries parallel.
Frederick
-
I wonder if this would work: https://duet3d.dozuki.com/Wiki/Gcode#Section_M556_Axis_skew_compensation
It doesn't seem like it's set up to use extra axes, but perhaps?