Circles not printing properly
-
Hello Hive mind,
Have converted a creatbot d600 pro from the stock setup over to Duet 3 with 1 xd boards to drive the axis motors. Initially all was good and since doing a firmware update circles no longer print properly. They are skewed on the y axis by 2mm. Have gone through the process of checking belts, gantry squareness and all is good. All belts are tight on both x and y axis, gantry is square, all drive gear screws are tight. Steps are calibrated, material flow is calibrated.
Thinking this may be motor timing issue, started to adjust the motor timings and can get the x axis to change which subsequently adds additional skew to the circle however any changes made to the y axis motor timings does nothing and the 2mm skew remains consistent. Wondering if this may be a firmware issue, motor issue or other? As yet have not changed the x and y axis over to check if there may be an issue with x1d board.
X axis motor is stock creatbot JSS57P2N hybrid stepper motor
Original Y axis motor died and was replaced with below
2.0 N·m NEMA 23 Integrated Easy Servo Motor
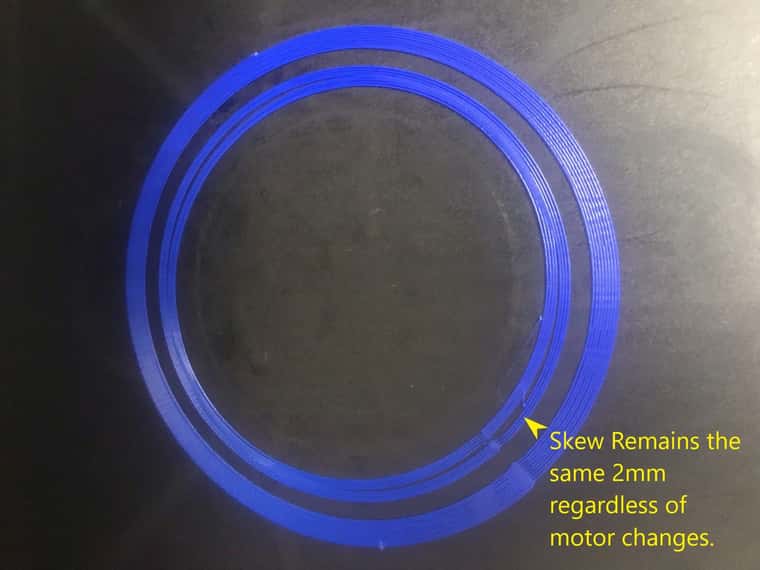
https://oceancontrols.com.au/SMC-136.html?category_id=572#product-details-tab-specificationConfig.g and picture of the skew attached.
 ```
```; Configuration file for Duet 3 (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.5 on Sat Nov 20 2021 09:35:37 GMT+0800 (Australian Western Standard Time) ; General preferences M575 P1 S1 B57600 ; enable support for PanelDue G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Duet 3" ; set printer name ; Drives G4 S2 ; Wait for expansion boards to start M569 P40.0 S0 R0 T5.0:5.0:10:100 ; physical drive X 40.0.0 goes forwards, requires an active high enable M569 P41.0 S1 R0 T5.0:5.0:10:100 ; physical drive Y 41.0 goes forwards, requires an active high enable M569 P42.0 S0 R1 T5.0:5.0:5:0 ; physical drive Z 42.0 goes forwards, requires an active low enable M569 P20.0 S0 ; physical drive extruder 1 20.0 goes forwards M569 P21.0 S1 ; physical drive extruder 2 21.0 goes forwards M584 X40.0 Y41.0 Z42.0 E20.0:21.0 ; set drive mapping M350 X16 Y16 Z1 E16:16 I0 ; configure microstepping without interpolation M92 X266.40 Y106.65 Z641.00 E430.00:430.00 ; set steps per mm M566 E120.00:120.00 ; set maximum instantaneous speed changes (mm/min) M203 E1200.00:1200.00 ; set maximum speeds (mm/min) M201 E250.00:250.00 ; set accelerations (mm/s^2) M906 E600:600 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X580 Y600 Z600 S0 ; set axis maxima ; Endstops M574 X1 S1 P"20.io2.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin 121.io2.in M574 Y1 S1 P"io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io1.in ; Z-Probe M950 S0 C"20.io0.out" ; create servo pin 0 for BLTouch M558 P9 C"20.io0.in" H15 F100 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X49 Y25 Z3.32 ; set Z probe trigger value, offset and trigger height M557 X50:500 Y50:500 S100 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T250000 B4138 R4700 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out7" T0 ; create bed heater output on !out7 and map it to sensor 0 M307 H0 B0 R0.551 C275.9 D9.13 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"20.temp1" Y"thermistor" T100000 B4680 C6.455513e-8 ; configure sensor 1 as thermistor on pin 20.temp0 M950 H1 C"20.out0" T1 ; create nozzle heater output on 20.out0 and map it to sensor 1 M307 H1 B0 R3.053 C222.5 D7.48 S1.00 V23.4 ; disable bang-bang mode for heater and set PWM limit Tool 0 M143 H1 S310 ; set temperature limit for heater 1 to 310C M308 S2 P"21.temp0" Y"thermistor" T100000 B4680 C6.455513e-8 ; configure sensor 2 as thermistor on pin 21.temp0 M950 H2 C"21.out0" T2 ; create nozzle heater output on 21.out0 and map it to sensor 2 M307 H2 B0 R2.990 C272.3:266.9 D7.61 S1.00 V23.0 ; disable bang-bang mode for heater and set PWM limit Tool 1 M143 H2 S310 ; set temperature limit for heater 2 to 310C M308 S3 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 3 as thermistor on pin temp1 M950 H3 C"out1" T3 ; create chamber heater output on out1 and map it to sensor 3 M307 H3 B0 R1.852 C43.3 D1.97 S1.00 ; enable bang-bang mode for the chamber heater and set PWM limit M141 H3 ; map chamber to heater 3 M143 H3 S70 ; set temperature limit for heater 3 to 70C M308 S4 Y"mcutemp" A"mcutemp" ; virtual temperature sensor for Duet3 MB ; Fans M950 F0 C"20.out1" Q500 ; create fan 0 on pin 20.out1 and set its frequency M106 P0 S1 H1 T40 ; set fan 0 value. Thermostatic control is turned on M950 F1 C"21.out2" Q500 ; create fan 1 on pin 21.out2 and set its frequency M106 P1 S1 H2 T40 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"21.out1" Q500 ; create fan 2 on pin 21.out1 and set its frequency M106 P2 S1 H2 T40 ; set fan 2 value. Thermostatic control is turned on M950 F3 C"out2" Q500 ; create fan 3 on pin out2 and set its frequency - Electronics Enclosure M106 P3 S1 H4 T40 ; set fan 3 temperature. Thermostatic control is turned on ; Tools M563 P0 S"Hot End 1" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M563 P1 S"Hot End 2" D1 H2 F0 ; define tool 1 G10 P1 X58.75 Y0 Z0 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not definedThanks for any help
-
@Thunderrunna I would expect backlash like that to be mechanical, particularly as it was previously working. Check that the Y axis motor pulley is tight on the motor shaft, or for any extra resistance to movement on the axis, before playing with settings.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Evening Ian, Before firmware update everything was printing perfectly. Then firmware update and the circles were skewed 2mm as previously stated. Have gone over both x and y axis with a fine tooth comb. checked all screws and couplings (the y axis motor goes through a reduction drive gearbox setup and then splits out via couplers to shafts to drive gears on left and right side, the gearbox belt and grub screws for the pulleys were both checked and were tight, belt tension was checked on both the reduction gear drive and also left and right to the y axis and is all good, gantry was disconnected from the drive and moved freely, once reconnected, gantry remained to move freely with the exception of being connected to the drive system but no "tight points" appeared). When changing the x axis timings, the skew would change 90 degrees to where the main issue is and would shift according to the timing changes. X axis timings were reverted to what they were and the y axis timings were changed, test print and nothing changed at all. Skew remained the same regardless of changes unlike the x axis where the "skew" was effectively controllable and repeatable. Leaves me scratching my head as this wasn't an issue until the firmware was updated on all boards and that regardless of timing changes to the y axis motor, the skew doesn't change.
-
@Thunderrunna What firmware version were you running before, and what version now? Have the 1XD boards definitely been updated to the same version as the main board (use M122 B40 etc to check)? Does anything show in the M122 output following printing a skewed circle? Can you revert the firmware and see if the issue goes away?
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Good Evening Ian
Current firmware is 3.4.5, previous firmware was 3.3. The update was done via ssh and compiled mainboard as well as all daughter boards (Duet 3 mainboard 6HC, 2 x Duet 3 Tool board 1LC, 3 x 1xd boards, tool distribution board).
All boards are on 3.4.4.
This is extremely puzzling as it is only the Y axis that is skewed, and the fact that the skew does not change even with changes to the timings, where as the x axis will change when motor timings are changed.
Wondering if might be motor, 1xd board or firmware.
Potential process of troubleshooting to check if motor, board or firmware would be to first swap the x and y 1xd boards/motor connections and see if the problem follows or not?
Reverting firmware is something i have considered but would keep that as a final option.
What would be the best approach to revert the firmware?Thank you
-
@Thunderrunna I've asked @dc42 if he has any insights into what might be causing this. Could you swap the Y axis 1XD board for the X axis board, and see if that causes the issue to follow the board, or stay with that axis? If it is a board problem, that may help diagnosis.
Ian
-
@Thunderrunna We think that reverting the firmware to 3.3 is the quickest way of determining if this is a firmware or hardware issue. If the problem goes away, then clearly it's on the firmware side, and we'll take a good look at it. However, we haven't seen any problems such as this during testing.
Can you share your config.g, the circles gcode, and an output of M122 after you have printed the circles, and they come out incorrect.
Downgrading the firmware is pretty straightforward, as you are running standalone (I think). Simply upload the 3.3 firmware zip. You may need to update the expansion boards separately, though.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Good Evening Ian,
The printer is in a workshop currently so will organise something to run the tests above and collect the information required asap. Duet is running with a raspberry pi 4 and not in standalone mode.
-
@Thunderrunna @dc42 has checked the release notes and the significant change to 1XD timing were done in version 3.3. So no difference between 3.3 and 3.4.x. He noticed that your M569 timings use a very long step-to-direction hold time, 100us. He suggests reducing that to 10us unless you have reason to think 10us is insufficient. Note that this is set to 0 on your Z axis, and direction setup up time is different from the other axes at 5us, too.
If you still want to revert to RRF 3.3, see the DSF downgrade packages notes here: https://docs.duet3d.com/en/User_manual/Machine_configuration/DSF_RPi#downgrade-packages
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Eveing Ian, The machine is a creatbot D600 pro and hen printing, the prints would have a "leaning to wer of pisa" effect from left right and front to back, a consistent layer shift effectively. Changing the motor timings on x and y (X axis motor is stock creatbot JSS57P2N hybrid stepper motor
Original Y axis motor died and was replaced with below
2.0 N·m NEMA 23 Integrated Easy Servo Motor
https://oceancontrols.com.au/SMC-136.html?category_id=572#product-details-tab-specification) removed this and prints were then as should be. The z axis is a "standard" stepper motor and thus the timings are different to x and y axis motors. As the immediate thought was "mechanical" the y axis was gone over multiple times with a fine tooth comb. The y axis goes from the motor drive gear via a looped belt to a larger drive gear. This drive gear then branches out to rods to drive both sides of the y axis on linear guides. When the gantry is disconnected from the motor and drive rods, it moves freely back and forth and no backlash is felt or visibly present and both sides move in unison and cannot "skew" or "miss drive" due to the linear guides. Attaching one side drive rod and leaving the other "free", the "free" side will still move as if connected. Both gantry belts and loop belt in the reduction drive were checked for potentially missing teeth and or excessive wear. All this was fine. the slicer at current is simplify3d 4.1, to rule out potentially a bad cad test model, 3 different "circles" were drawn and exported from 3 different cad softwares and all sliced in simplify3d, issue remained. Headscratching ensued and then an attempt at adjusting y axis motor timings was undertaken. Lower values rendered the drive to cease all movement, higher values made no change. The same test was attempted on the x axis for a reference. Lower values would render the drive to cease all movement, higher values would effectively create offset circular strings of varying distances dependant on the motor timings used. This was repeatable at anytime, the y axis remained the same regardless of motor timings. This is where the real headscratching came about as to why the x axis can effectively be "forced" to create repeatable errors with change of motor timings but the y axis does not change at all. The only thing changed before this error occuring was a firmware update. The question then becomes is there a firmware glitch, a board glitch or a motor issue.
Once i have availability to access the machine, i will get all the requested information together (file g code, m122 outputs).
Thank you for your time and assistance. -
@Thunderrunna It sounds like the difference in behaviour of the X and Y axis, when changing the motor timings, is down to the different motors and (presumably) stepper/servo drivers. I've had a look at the datasheet here but I can't see anything obvious that would cause a change in behaviour. I couldn't find a datasheet for the JSS57P2N, just this product page: https://www.jss-motor.com/product/nema-23-integrated-step-servo-motor-with-driver.html
Is it the Y axis that is moving incorrectly after the firmware update?
Unfortunately, I think the only way to say for sure if it's a firmware issue, or something else that has happened at the same time as the firmware update, is to revert the firmware to the version that was working.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts
Good Evening Ian, had a chance to get some time with the machine today after resolving a few internet issues. I went through and double checked all the boards firmware (all diagnostic logs will be attached below). Ran an update via ssh, raspian buster image updated (and this is where a lot more questions are raised) and the boards remained as they are as no updates required.Ran the same print file as the previous image in the beginning of the forum, this time the results were different after the raspberry pi update. the skew has become less but is still visible, the motors were very "jerky" i.e the motors seemed to vibrate throughout the print which is new and also the movements weren't smooth, very staggered. Again checked through the y axis, belt tension, bearings, checked grub screws, anything that could be a possible problem even though the machine has not moved nor switched on since the last time when this post was created, still all is good, run the same file again, same result. Did not revert the firmware backwards as the previous firmware had a homing issue where when homing all axes, the x and y would home together (front left of the bed) and upon return to center of the bed, the z axis would immediately begin to raise. This was problematic in the case of not enough z height during the travel move, the bl touch pin would get caught and bent before triggering.
Attached is the config file, board diagnostics pre and post print, g code file for the print and picture of the latest circle test print.

Config.g file
; Configuration file for Duet 3 (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.5 on Sat Nov 20 2021 09:35:37 GMT+0800 (Australian Western Standard Time) ; General preferences M575 P1 S1 B57600 ; enable support for PanelDue G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Duet 3" ; set printer name ; Drives G4 S2 ; Wait for expansion boards to start M569 P40.0 S0 R0 T5.0:5.0:10:100 ; physical drive X 40.0.0 goes forwards, requires an active high enable M569 P41.0 S1 R0 T5.0:5.0:10:100 ; physical drive Y 41.0 goes forwards, requires an active high enable M569 P42.0 S0 R1 T5.0:5.0:5:0 ; physical drive Z 42.0 goes forwards, requires an active low enable M569 P20.0 S0 ; physical drive extruder 1 20.0 goes forwards M569 P21.0 S1 ; physical drive extruder 2 21.0 goes forwards M584 X40.0 Y41.0 Z42.0 E20.0:21.0 ; set drive mapping M350 X16 Y16 Z1 E16:16 I0 ; configure microstepping without interpolation M92 X266.40 Y106.65 Z641.00 E430.00:430.00 ; set steps per mm M566 E120.00:120.00 ; set maximum instantaneous speed changes (mm/min) M203 E1200.00:1200.00 ; set maximum speeds (mm/min) M201 E250.00:250.00 ; set accelerations (mm/s^2) M906 E600:600 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X580 Y600 Z600 S0 ; set axis maxima ; Endstops M574 X1 S1 P"20.io2.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin 121.io2.in M574 Y1 S1 P"io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io1.in ; Z-Probe M950 S0 C"20.io0.out" ; create servo pin 0 for BLTouch M558 P9 C"20.io0.in" H15 F100 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X49 Y25 Z3.32 ; set Z probe trigger value, offset and trigger height M557 X50:500 Y50:500 S100 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T250000 B4138 R4700 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out7" T0 ; create bed heater output on !out7 and map it to sensor 0 M307 H0 B0 R0.551 C275.9 D9.13 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"20.temp1" Y"thermistor" T100000 B4680 C6.455513e-8 ; configure sensor 1 as thermistor on pin 20.temp0 M950 H1 C"20.out0" T1 ; create nozzle heater output on 20.out0 and map it to sensor 1 M307 H1 B0 R3.053 C222.5 D7.48 S1.00 V23.4 ; disable bang-bang mode for heater and set PWM limit Tool 0 M143 H1 S310 ; set temperature limit for heater 1 to 310C M308 S2 P"21.temp0" Y"thermistor" T100000 B4680 C6.455513e-8 ; configure sensor 2 as thermistor on pin 21.temp0 M950 H2 C"21.out0" T2 ; create nozzle heater output on 21.out0 and map it to sensor 2 M307 H2 B0 R2.990 C272.3:266.9 D7.61 S1.00 V23.0 ; disable bang-bang mode for heater and set PWM limit Tool 1 M143 H2 S310 ; set temperature limit for heater 2 to 310C M308 S3 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 3 as thermistor on pin temp1 M950 H3 C"out1" T3 ; create chamber heater output on out1 and map it to sensor 3 M307 H3 B0 R1.852 C43.3 D1.97 S1.00 ; enable bang-bang mode for the chamber heater and set PWM limit M141 H3 ; map chamber to heater 3 M143 H3 S70 ; set temperature limit for heater 3 to 70C M308 S4 Y"mcutemp" A"mcutemp" ; virtual temperature sensor for Duet3 MB ; Fans M950 F0 C"20.out1" Q500 ; create fan 0 on pin 20.out1 and set its frequency M106 P0 S1 H1 T40 ; set fan 0 value. Thermostatic control is turned on M950 F1 C"21.out2" Q500 ; create fan 1 on pin 21.out2 and set its frequency M106 P1 S1 H2 T40 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"21.out1" Q500 ; create fan 2 on pin 21.out1 and set its frequency M106 P2 S1 H2 T40 ; set fan 2 value. Thermostatic control is turned on M950 F3 C"out2" Q500 ; create fan 3 on pin out2 and set its frequency - Electronics Enclosure M106 P3 S1 H4 T40 ; set fan 3 temperature. Thermostatic control is turned on ; Tools M563 P0 S"Hot End 1" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M563 P1 S"Hot End 2" D1 H2 F0 ; define tool 1 G10 P1 X58.75 Y0 Z0 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined code_textwill add pre and post diagnostics and g code in separate replies
-
codePre print initial startup 7/1/2023, 9:20:02 AM M122 B21 Diagnostics for board 21: Duet TOOL1LC rev 1.1 or later firmware version 3.4.4 (2022-10-14 11:46:33) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 2620, free system stack 88 words Tasks: Move(notifyWait,0.0%,153) HEAT(notifyWait,1.0%,113) CanAsync(notifyWait,0.0%,65) CanRecv(notifyWait,0.1%,76) CanClock(notifyWait,0.1%,65) ACCEL(notifyWait,0.0%,61) TMC(notifyWait,14.7%,57) MAIN(running,59.6%,351) IDLE(ready,0.0%,26) AIN(delaying,24.4%,142), total 100.0% Last reset 03:02:01 ago, cause: power up Last software reset time unknown, reason: AssertionFailed, available RAM 3392, slot 0 Software reset code 0x0120 ICSR 0x00000000 SP 0x2000415c Task Freestk 129 bad marker Stack: 00000544 00022ffc 00019b65 20003134 00016cff 20003134 000163d1 20000ed0 00000000 00000001 00008275 200071c8 200071c8 200071e0 00000000 20000f50 00011647 000223b8 00022474 00021ac8 00019b05 200071c8 200071c8 20000f50 000083ed 200071d8 000009c7 Driver 0: pos 0, 430.0 steps/mm,standstill, SG min 0, read errors 0, write errors 0, ifcnt 13, reads 43173, writes 0, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -1/5, peak Rx sync delay 218, resyncs 0/0, no step interrupt scheduled VIN voltage: min 23.9, current 23.9, max 24.0 MCU temperature: min 16.6C, current 28.5C, max 28.5C Last sensors broadcast 0x00000004 found 1 244 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 143315, send timeouts 0, received 93143, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 0, other errors 0 7/1/2023, 9:19:58 AM M122 B20 Diagnostics for board 20: Duet TOOL1LC rev 1.1 or later firmware version 3.4.4 (2022-10-14 11:46:33) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 2644, free system stack 88 words Tasks: Move(notifyWait,0.0%,153) HEAT(notifyWait,1.0%,101) CanAsync(notifyWait,0.0%,65) CanRecv(notifyWait,0.1%,76) CanClock(notifyWait,0.1%,65) ACCEL(notifyWait,0.0%,61) TMC(delaying,14.8%,57) MAIN(running,59.6%,351) IDLE(ready,0.0%,26) AIN(delaying,24.3%,142), total 100.0% Last reset 03:01:57 ago, cause: power up Last software reset time unknown, reason: AssertionFailed, available RAM 3392, slot 2 Software reset code 0x0120 ICSR 0x00000000 SP 0x2000415c Task Freestk 129 bad marker Stack: 00000544 00022ffc 00019b65 20003134 00016cff 20003134 000163d1 20000ed0 00000000 00000001 00008275 200071c8 200071c8 200071e0 00000000 20000f50 00011647 000223b8 00022474 00021ac8 00019b05 200071c8 200071c8 20000f50 000083ed 200071d8 000009c7 Driver 0: pos 0, 430.0 steps/mm,standstill, SG min 0, read errors 0, write errors 0, ifcnt 13, reads 45102, writes 0, timeouts 1, DMA errors 0, CC errors 0, failedOp 0x71, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 0/6, peak Rx sync delay 216, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.0, current 24.1, max 24.1 MCU temperature: min 15.3C, current 27.2C, max 27.3C Last sensors broadcast 0x00000002 found 1 241 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 143396, send timeouts 0, received 93192, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 0, other errors 0 7/1/2023, 9:19:54 AM M122 B42 Diagnostics for board 42: Duet EXP1XD firmware version 3.4.4 (2022-10-14 11:45:39) Bootloader ID: SAMC21 bootloader version 2.0 (2020-10-15b1) All averaging filters OK Never used RAM 5484, free system stack 88 words Tasks: Move(notifyWait,0.0%,147) HEAT(notifyWait,0.3%,115) CanAsync(notifyWait,0.0%,64) CanRecv(notifyWait,0.2%,77) CanClock(notifyWait,0.1%,64) MAIN(running,82.4%,443) IDLE(ready,0.0%,40) AIN(delaying,17.0%,142), total 100.0% Last reset 03:01:52 ago, cause: power up Last software reset data not available Driver 0: pos 0, 641.0 steps/mm, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 1/5, peak Rx sync delay 204, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.3, current 24.3, max 24.4 MCU temperature: min 13.4C, current 23.5C, max 23.8C Last sensors broadcast 0x00000000 found 0 235 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 57386, send timeouts 0, received 121901, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 7/1/2023, 9:19:51 AM M122 B41 Diagnostics for board 41: Duet EXP1XD firmware version 3.4.4 (2022-10-14 11:45:39) Bootloader ID: SAMC21 bootloader version 2.0 (2020-10-15b1) All averaging filters OK Never used RAM 5484, free system stack 88 words Tasks: Move(notifyWait,0.0%,147) HEAT(notifyWait,0.3%,115) CanAsync(notifyWait,0.0%,64) CanRecv(notifyWait,0.2%,77) CanClock(notifyWait,0.1%,64) MAIN(running,82.4%,443) IDLE(ready,0.0%,40) AIN(delaying,17.0%,142), total 100.0% Last reset 03:01:50 ago, cause: power up Last software reset data not available Driver 0: pos 0, 106.7 steps/mm, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -1/4, peak Rx sync delay 203, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.0, current 24.1, max 24.1 MCU temperature: min 14.3C, current 27.0C, max 27.2C Last sensors broadcast 0x00000000 found 0 76 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 57424, send timeouts 0, received 121983, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 7/1/2023, 9:19:48 AM M122 B40 Diagnostics for board 40: Duet EXP1XD firmware version 3.4.4 (2022-10-14 11:45:39) Bootloader ID: SAMC21 bootloader version 2.0 (2020-10-15b1) All averaging filters OK Never used RAM 5484, free system stack 88 words Tasks: Move(notifyWait,0.0%,147) HEAT(notifyWait,0.3%,115) CanAsync(notifyWait,0.0%,64) CanRecv(notifyWait,0.2%,77) CanClock(notifyWait,0.1%,64) MAIN(running,82.8%,443) IDLE(ready,0.0%,40) AIN(delaying,16.6%,142), total 100.0% Last reset 03:01:46 ago, cause: power up Last software reset data not available Driver 0: pos 0, 266.4 steps/mm, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 1/5, peak Rx sync delay 205, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.3, current 24.3, max 24.3 MCU temperature: min 13.3C, current 23.8C, max 23.9C Last sensors broadcast 0x00000000 found 0 154 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 57718, send timeouts 0, received 122608, lost 0, free buffers 37, min 36, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 7/1/2023, 9:19:25 AM M122 B0 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.4.5 (2022-11-30 19:35:23) running on Duet 3 MB6HC v1.01 (SBC mode) Board ID: 08DJM-9P63L-DJ3S0-7J9DG-3SD6J-1VJZ9 Used output buffers: 1 of 40 (23 max) === RTOS === Static ram: 152760 Dynamic ram: 67960 of which 204 recycled Never used RAM 129748, free system stack 190 words Tasks: SBC(ready,3.3%,448) HEAT(notifyWait,0.1%,322) Move(notifyWait,0.0%,351) CanReceiv(notifyWait,0.3%,774) CanSender(notifyWait,0.0%,336) CanClock(delaying,0.0%,339) TMC(notifyWait,39.1%,91) MAIN(running,57.2%,1126) IDLE(ready,0.0%,30), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 03:01:24 ago, cause: power up Last software reset at 2023-03-04 10:36, reason: User, GCodes spinning, available RAM 126288, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0043c000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 Step timer max interval 134 MCU temperature: min 35.3, current 38.1, max 38.3 Supply voltage: min 23.9, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0 Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min n/a, mspos 8, reads 13784, writes 0 timeouts 0 Driver 1: standstill, SG min n/a, mspos 8, reads 13784, writes 0 timeouts 0 Driver 2: standstill, SG min n/a, mspos 8, reads 13784, writes 0 timeouts 0 Driver 3: standstill, SG min n/a, mspos 8, reads 13784, writes 0 timeouts 0 Driver 4: standstill, SG min n/a, mspos 8, reads 13784, writes 0 timeouts 0 Driver 5: standstill, SG min n/a, mspos 8, reads 13784, writes 0 timeouts 0 Date/time: 2023-07-01 02:19:26 Slowest loop: 2.73ms; fastest: 0.05ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters 3 -1 -1 -1, ordering errs 0 === GCodes === Segments left: 0 Movement lock held by null HTTP* is doing "M122 B0" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === CAN === Messages queued 63946, received 454722, lost 0, boc 0 Longest wait 2ms for reply type 6013, peak Tx sync delay 276, free buffers 50 (min 49), ts 35524/35524/0 Tx timeouts 0,0,0,0,0,0 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 36645/36645 SPI underruns 0, overruns 0 State: 5, disconnects: 1, timeouts: 1 total, 1 by SBC, IAP RAM available 0x2ad48 Buffer RX/TX: 0/0-0, open files: 0 === Duet Control Server === Duet Control Server v3.4.5 Code buffer space: 4096 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0 Full transfers per second: 0.00, max time between full transfers: 56.8ms, max pin wait times: 47.5ms/16.4ms Codes per second: 0.00 Maximum length of RX/TX data transfers: 3160/64 7/1/2023, 9:04:12 AM Connected to duet3.local _text -
Post print status 7/1/2023, 10:01:46 AM m122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.4.5 (2022-11-30 19:35:23) running on Duet 3 MB6HC v1.01 (SBC mode) Board ID: 08DJM-9P63L-DJ3S0-7J9DG-3SD6J-1VJZ9 Used output buffers: 1 of 40 (24 max) === RTOS === Static ram: 152760 Dynamic ram: 68288 of which 0 recycled Never used RAM 126288, free system stack 142 words Tasks: SBC(resourceWait:,0.8%,476) HEAT(notifyWait,0.0%,322) Move(notifyWait,1.2%,245) CanReceiv(notifyWait,0.1%,772) CanSender(notifyWait,0.0%,326) CanClock(delaying,0.0%,339) TMC(notifyWait,7.8%,91) MAIN(running,90.0%,1222) IDLE(ready,0.1%,30), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 00:19:24 ago, cause: software Last software reset at 2023-07-01 02:42, reason: User, none spinning, available RAM 126316, slot 2 Software reset code 0x0012 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 Step timer max interval 135 MCU temperature: min 38.1, current 39.7, max 39.9 Supply voltage: min 23.9, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0 Heap OK, handles allocated/used 99/0, heap memory allocated/used/recyclable 2048/12/12, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min 0, mspos 8, reads 4062, writes 11 timeouts 0 Driver 1: standstill, SG min 0, mspos 8, reads 4062, writes 11 timeouts 0 Driver 2: standstill, SG min 0, mspos 8, reads 4062, writes 11 timeouts 0 Driver 3: standstill, SG min 0, mspos 8, reads 4063, writes 11 timeouts 0 Driver 4: standstill, SG min 0, mspos 8, reads 4063, writes 11 timeouts 0 Driver 5: standstill, SG min 0, mspos 8, reads 4063, writes 11 timeouts 0 Date/time: 2023-07-01 03:01:46 Slowest loop: 381.28ms; fastest: 0.04ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 20, maxWait 119498ms, bed compensation in use: mesh, comp offset 0.000 === MainDDARing === Scheduled moves 23553, completed 23553, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters 3 -1 -1 -1, ordering errs 0 Heater 0 is on, I-accum = 0.3 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP* is doing "M122" in state(s) 0 Telnet is idle in state(s) 0 File* is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === CAN === Messages queued 81096, received 74524, lost 0, boc 0 Longest wait 2ms for reply type 6026, peak Tx sync delay 292, free buffers 50 (min 30), ts 5825/5824/0 Tx timeouts 0,0,0,0,0,0 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 46748/46748 SPI underruns 0, overruns 0 State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x2acf8 Buffer RX/TX: 0/0-0, open files: 0 === Duet Control Server === Duet Control Server v3.4.5 Code buffer space: 4096 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0 Full transfers per second: 40.18, max time between full transfers: 79.9ms, max pin wait times: 55.2ms/19.0ms Codes per second: 20.51 Maximum length of RX/TX data transfers: 3396/1560 7/1/2023, 9:54:11 AM Finished printing file 0:/gcodes/Bricscad.gcode, print time was 0h 10m 7/1/2023, 9:53:09 AM T:241.1 /240.0 T0:241.1 /240.0 T1:36.7 /0.0 B:90.1 /90.0 C:24.4 /0.0 7/1/2023, 9:53:09 AM T:241.1 /240.0 T0:241.1 /240.0 T1:36.7 /0.0 B:90.1 /90.0 C:24.4 /0.0 7/1/2023, 9:52:20 AM T:241.2 /240.0 T0:241.2 /240.0 T1:36.6 /0.0 B:90.1 /90.0 C:24.1 /0.0 7/1/2023, 9:52:20 AM T:241.2 /240.0 T0:241.2 /240.0 T1:36.6 /0.0 B:90.1 /90.0 C:24.1 /0.0 7/1/2023, 9:51:33 AM T:241.2 /240.0 T0:241.2 /240.0 T1:36.2 /0.0 B:90.0 /90.0 C:24.4 /0.0 7/1/2023, 9:51:33 AM T:241.2 /240.0 T0:241.2 /240.0 T1:36.2 /0.0 B:90.0 /90.0 C:24.4 /0.0 7/1/2023, 9:50:44 AM T:241.2 /240.0 T0:241.2 /240.0 T1:36.1 /0.0 B:89.6 /90.0 C:24.1 /0.0 7/1/2023, 9:50:44 AM T:241.2 /240.0 T0:241.2 /240.0 T1:36.1 /0.0 B:89.6 /90.0 C:24.1 /0.0 7/1/2023, 9:49:57 AM T:241.2 /240.0 T0:241.2 /240.0 T1:35.9 /0.0 B:90.0 /90.0 C:24.3 /0.0 7/1/2023, 9:49:57 AM T:241.2 /240.0 T0:241.2 /240.0 T1:35.9 /0.0 B:90.0 /90.0 C:24.3 /0.0 7/1/2023, 9:49:09 AM T:240.6 /240.0 T0:240.6 /240.0 T1:35.6 /0.0 B:90.1 /90.0 C:23.6 /0.0 7/1/2023, 9:49:09 AM T:240.6 /240.0 T0:240.6 /240.0 T1:35.6 /0.0 B:90.1 /90.0 C:23.6 /0.0 7/1/2023, 9:46:58 AM T:239.6 /240.0 T0:239.6 /240.0 T1:34.0 /0.0 B:90.7 /90.0 C:26.0 /0.0 7/1/2023, 9:46:58 AM T:239.6 /240.0 T0:239.6 /240.0 T1:34.0 /0.0 B:90.7 /90.0 C:26.0 /0.0 7/1/2023, 10:04:00 AM m122 b21 Diagnostics for board 21: Duet TOOL1LC rev 1.1 or later firmware version 3.4.4 (2022-10-14 11:46:33) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 2620, free system stack 88 words Tasks: Move(notifyWait,0.0%,153) HEAT(notifyWait,0.2%,115) CanAsync(notifyWait,0.0%,65) CanRecv(notifyWait,0.0%,76) CanClock(notifyWait,0.0%,65) ACCEL(notifyWait,0.0%,61) TMC(delaying,3.0%,57) MAIN(running,91.9%,351) IDLE(ready,0.0%,26) AIN(delaying,4.9%,142), total 100.0% Last reset 00:21:40 ago, cause: software Last software reset time unknown, reason: AssertionFailed, available RAM 3392, slot 0 Software reset code 0x0120 ICSR 0x00000000 SP 0x2000415c Task Freestk 129 bad marker Stack: 00000544 00022ffc 00019b65 20003134 00016cff 20003134 000163d1 20000ed0 00000000 00000001 00008275 200071c8 200071c8 200071e0 00000000 20000f50 00011647 000223b8 00022474 00021ac8 00019b05 200071c8 200071c8 20000f50 000083ed 200071d8 000009c7 Driver 0: pos 0, 430.0 steps/mm,standstill, SG min 0, read errors 0, write errors 1, ifcnt 27, reads 60433, writes 13, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 0/5, peak Rx sync delay 216, resyncs 0/0, no step interrupt scheduled VIN voltage: min 23.5, current 23.9, max 23.9 MCU temperature: min 35.0C, current 35.0C, max 38.9C Last sensors broadcast 0x00000004 found 1 79 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 25984, send timeouts 0, received 16878, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, other errors 0 7/1/2023, 10:03:56 AM m122 b20 Diagnostics for board 20: Duet TOOL1LC rev 1.1 or later firmware version 3.4.4 (2022-10-14 11:46:33) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 2644, free system stack 45 words Tasks: Move(notifyWait,0.6%,91) HEAT(notifyWait,0.3%,83) CanAsync(notifyWait,0.0%,57) CanRecv(notifyWait,0.1%,74) CanClock(notifyWait,0.0%,65) ACCEL(notifyWait,0.0%,61) TMC(notifyWait,3.0%,57) MAIN(running,91.1%,351) IDLE(ready,0.0%,26) AIN(delaying,4.9%,142), total 100.0% Last reset 00:21:36 ago, cause: software Last software reset time unknown, reason: AssertionFailed, available RAM 3392, slot 2 Software reset code 0x0120 ICSR 0x00000000 SP 0x2000415c Task Freestk 129 bad marker Stack: 00000544 00022ffc 00019b65 20003134 00016cff 20003134 000163d1 20000ed0 00000000 00000001 00008275 200071c8 200071c8 200071e0 00000000 20000f50 00011647 000223b8 00022474 00021ac8 00019b05 200071c8 200071c8 20000f50 000083ed 200071d8 000009c7 Driver 0: pos 684348, 430.0 steps/mm,standstill, SG min 2, read errors 0, write errors 1, ifcnt 30, reads 56049, writes 14, timeouts 0, DMA errors 0, CC errors 0, steps req 692948 done 692948 Moves scheduled 22093, completed 22093, in progress 0, hiccups 0, step errors 0, maxPrep 496, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 0/5, peak Rx sync delay 216, resyncs 0/0, no step interrupt scheduled VIN voltage: min 22.7, current 24.0, max 24.1 MCU temperature: min 34.5C, current 34.5C, max 41.1C Last sensors broadcast 0x00000002 found 1 198 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 25929, send timeouts 0, received 38934, lost 0, free buffers 37, min 36, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 343, adv 35255/74656 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, other errors 0 7/1/2023, 10:03:50 AM m122 b41 Diagnostics for board 41: Duet EXP1XD firmware version 3.4.4 (2022-10-14 11:45:39) Bootloader ID: SAMC21 bootloader version 2.0 (2020-10-15b1) All averaging filters OK Never used RAM 5484, free system stack 43 words Tasks: Move(notifyWait,0.0%,111) HEAT(notifyWait,0.1%,115) CanAsync(notifyWait,0.0%,64) CanRecv(notifyWait,0.0%,75) CanClock(notifyWait,0.0%,64) MAIN(running,96.4%,427) IDLE(ready,0.0%,40) AIN(delaying,3.4%,142), total 100.0% Last reset 00:21:30 ago, cause: software Last software reset data not available Driver 0: pos -224641, 106.7 steps/mm, steps req 0 done 0 Moves scheduled 21773, completed 21773, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 0/4, peak Rx sync delay 195, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.0, current 24.1, max 24.1 MCU temperature: min 27.3C, current 29.6C, max 29.8C Last sensors broadcast 0x00000000 found 0 53 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 423, send timeouts 0, received 854, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 7/1/2023, 10:03:47 AM m122 b40 Diagnostics for board 40: Duet EXP1XD firmware version 3.4.4 (2022-10-14 11:45:39) Bootloader ID: SAMC21 bootloader version 2.0 (2020-10-15b1) All averaging filters OK Never used RAM 5484, free system stack 43 words Tasks: Move(notifyWait,0.6%,111) HEAT(notifyWait,0.1%,115) CanAsync(notifyWait,0.0%,64) CanRecv(notifyWait,0.2%,75) CanClock(notifyWait,0.0%,64) MAIN(running,95.4%,448) IDLE(ready,0.0%,40) AIN(delaying,3.7%,142), total 100.0% Last reset 00:21:26 ago, cause: software Last software reset data not available Driver 0: pos -549460, 266.4 steps/mm, steps req 4630002 done 4185260 Moves scheduled 22356, completed 22356, in progress 0, hiccups 14385, step errors 0, maxPrep 804, maxOverdue 17691, maxInc 80, mcErrs 0, gcmErrs 0 Peak sync jitter 0/5, peak Rx sync delay 279, resyncs 0/0, no step interrupt scheduled VIN voltage: min 23.9, current 24.3, max 24.3 MCU temperature: min 24.4C, current 26.4C, max 26.5C Last sensors broadcast 0x00000000 found 0 240 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 10319, send timeouts 0, received 44176, lost 0, free buffers 37, min 36, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 571, adv 34376/74648 -
Simplify3d g code for test file
-
Thank you
-
@droftarts touching base. Any ideas or suggestions?
-
@Thunderrunna I’ll have a look at the gcode, see if I can run it, when I get the chance, probably tomorrow, but I doubt the problem is there.
Did you swap the 1XD boards over? Did you manage to revert the firmware to RRF 3.3 to test?
Another thought: did you tune the Y axis motor when it was replaced? I notice in the product page link you posted there is some documentation about this, though I haven’t read it. It could be that the encoder is not reporting the position to the stepper driver correctly.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts
Good Evening Ian,
Didnt get the chance to revert back to 3.3 due to time constraints,and also a bit hesitant at this point due to when 3.3 firmware was installed there were issues with homing (as stated above, changing homing scripts did nothing), running a bed mesh would stop and error after probing 5 points (was unable to resolve this issue) so the bed was manually leveled and checked every few print runs.Did not get the chance to switch the 1XD boards around (time constraints).
The new Y axis motor is exactly the same as the original "stock" creatbot motor and all dip switches and tuning parameters were copied over and besides the aforementioned issues, everything worked fine.
As stated above, the machine had not been switched on or run since the last time when the circles issue was raised here in the forum. This time round, the only change was that the rpi4 has run an update and the gcode file that was used last time and saved on the sd card was run after the update to which not only did the print come out differently (the offset/skew is better/tighter) but the machine itself i.e the motors especially sounded as if they were heavily labouring, very jerky/deep vibration sort of sound on all movements. And this is where the testing ceased as the only thing that changed was the rpi4 updating and thus raised more questions of why is the circles "skew" now better than previous but still skewed none the less.
Cheers,
Albert