Choosing ACT steppers
-
Hello,
I'm currently working on a Delta printer design and would like to use 0.9° stepper motors for the axes. I've read some good comments about ACT motors in several comments, and I've found two motors that might be interesting - 17HM5424 and 17HM5417. I've found a list comparing the different stepper versions here:
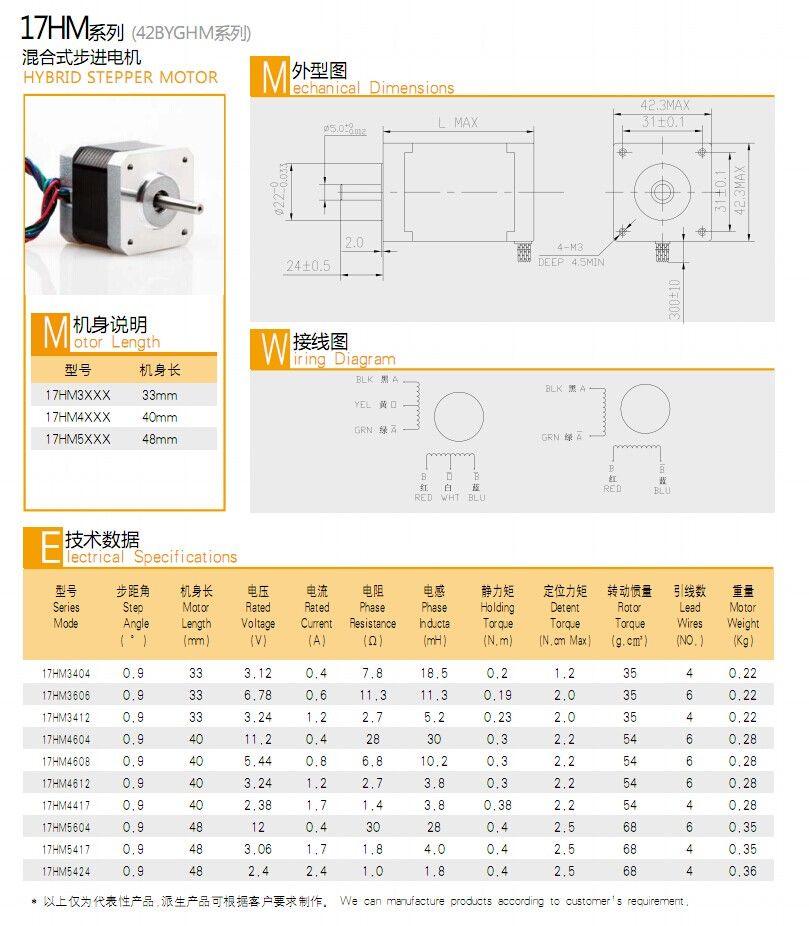
If I understand correctly, the 17HM5424 would be the better alternative because the lower inductance would allow for faster movement, is that correct?
Also, is it worth using 0.9° steppers for the extruders (direct MK8-style) as well or should I use 1.8° steppers for that?Thanks
Volker -
For the Duet WiFi, I would choose the 2.4A motor. For any other electronics including the Duet 0.8.5, I would choose the 1.7A one.
I use geared extruders rather than direct drive because direct drive extruders often suffer from lack of torque. If you must use a direct drive extruder, then I think a 0.9deg/step motor would be a good idea in order to improve extruder resolution, as long as it has sufficient torque.
-
A bit late, but nevertheless: Thank you very much, David!
I've assembled a preliminary version of one of my Delta towers, and it seems to work as intended.
A follow-up question - how do I determine a sensible current setting for the steppers? https://duet3d.com/wiki/Choosing_stepper_motors reads "Plan to run each stepper motor at between 50% and 85% of its rated current." - does that refer to the 2.4A, and can I insert that value directly into the M906 line? -
Yes, if they are 2.4A motors then run them at between 50% and 85% of 2.4A. Currently the maximum supported on the Duet WiFi is 2.0A but that will be increased. The current in the M906 line must be given in mA.