@JoergS5 Thanks for the reply. I have now found the robot 4 axis pelletized section of the duet3d documentation ( duet3d*/User_manual/Machine_configuration/robot_4_axis_palletized), this sould be a perfekt fitt.
I have uploaded the "github*/JoergS5/RepRapFirmware_robot" firmware to the board and run the firmware update. But now im stuck with :
M669 K13 B"axisTypes=PRRRp"
currently only CoreXY5AC and CoreXY5BC are support
and it wont take the D values
=== M669 K13 current config ===
numOfAxes 5 axisTypes ��������� chain ����������������������������������������� (normal ��������������������� special ��������������)
axis � ori: -0.00 0.00 0.00 point: -0.00 0.00 0.00 angles min/max/home: -0.00 0.00 0.00
axis � ori: 0.00 0.00 0.00 point: 0.00 0.00 0.00 angles min/max/home: 0.00 0.00 0.00
axis � ori: 0.00 0.00 0.00 point: 0.00 0.00 0.00 angles min/max/home: 0.00 0.00 0.00
axis � ori: 0.00 0.00 0.00 point: 0.00 0.00 0.00 angles min/max/home: 0.00 0.00 0.00
axis � ori: 0.00 0.00 0.00 point: 0.00 0.00 0.00 angles min/max/home: 0.00 0.00 0.00
Screw values:
reference angles/positions: -0.00 0.00 0.00 0.00 0.00
endpoint axis X: -0.00 -0.00 -0.00
endpoint axis Y: -0.00 -0.00 -0.00
endpoint axis Z: -0.00 -0.00 -0.00
endpoint point: -0.00 -0.00 -0.00
abSign: 0 (A/B angle preference: 0 take >=0, 1 take <= 0, 2 don't change calculation
cache used: -1 maximum: 200
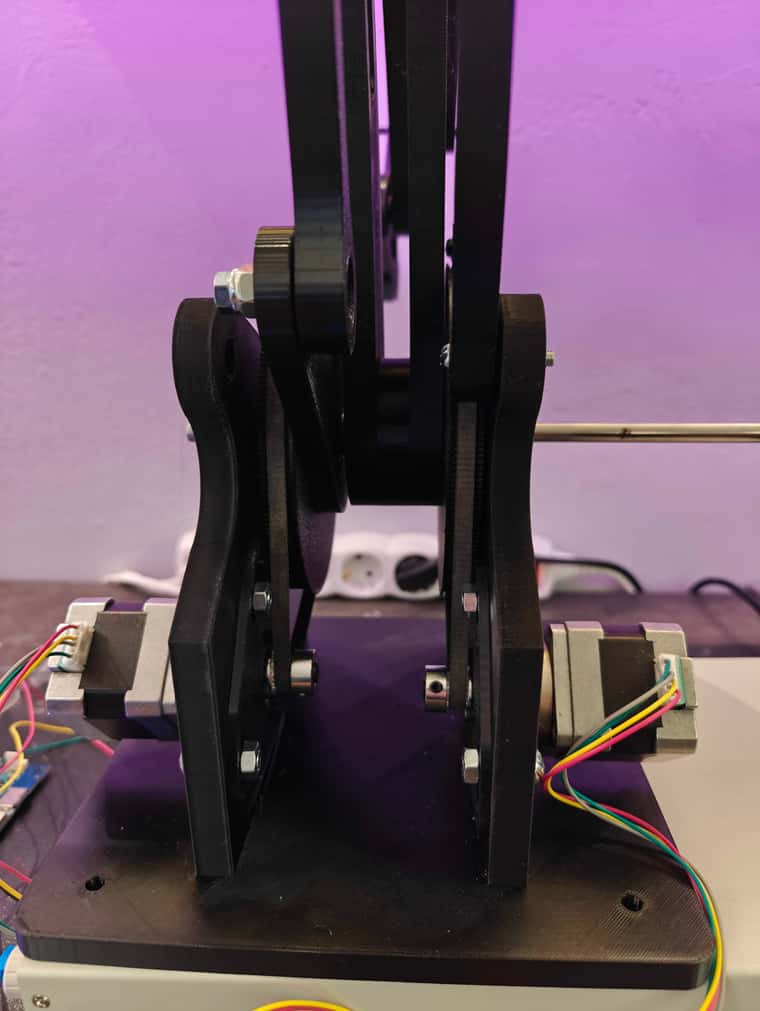
Mine is the same as yours with one arm fixt to the base (mine is to the right seen from behind)
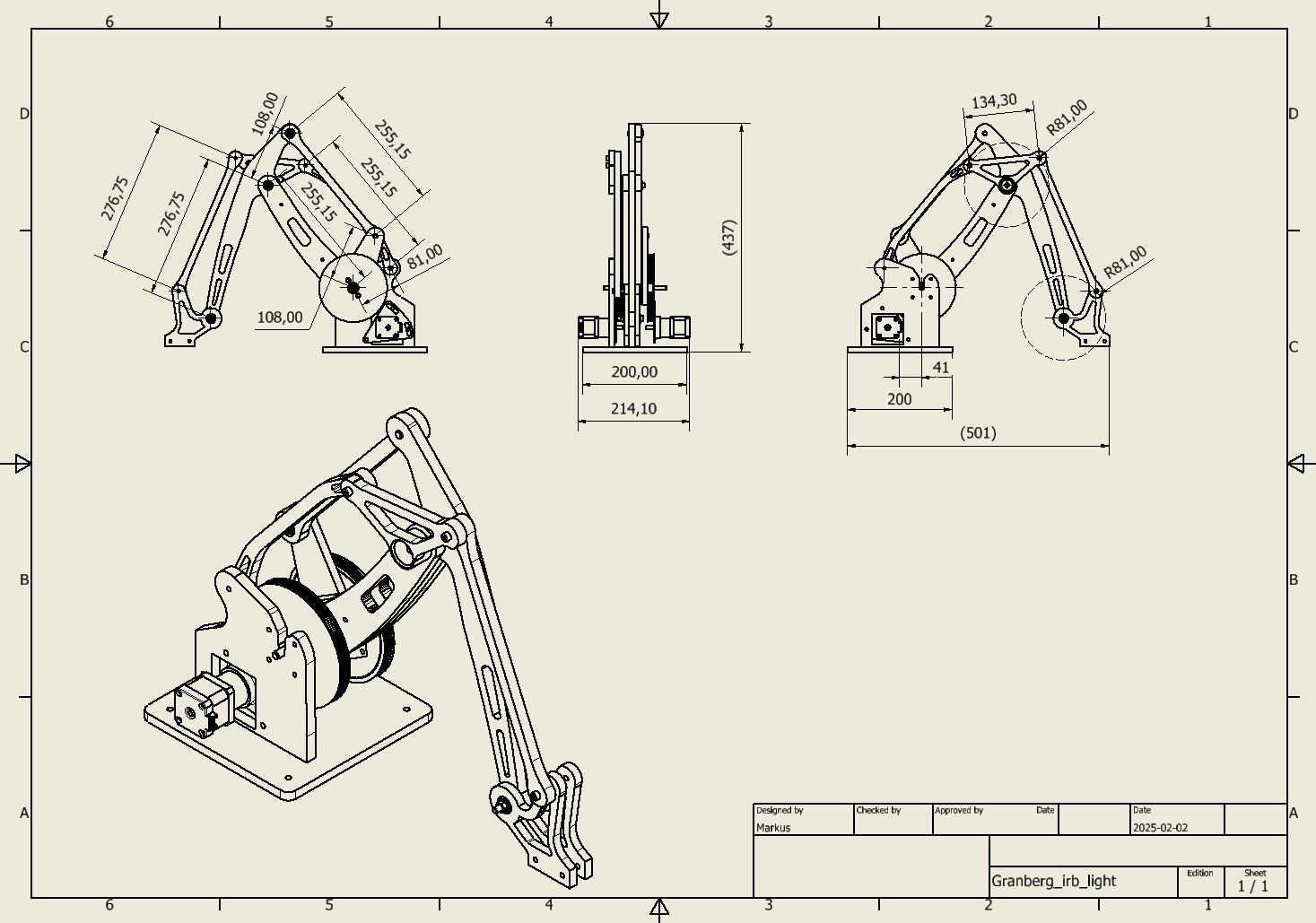
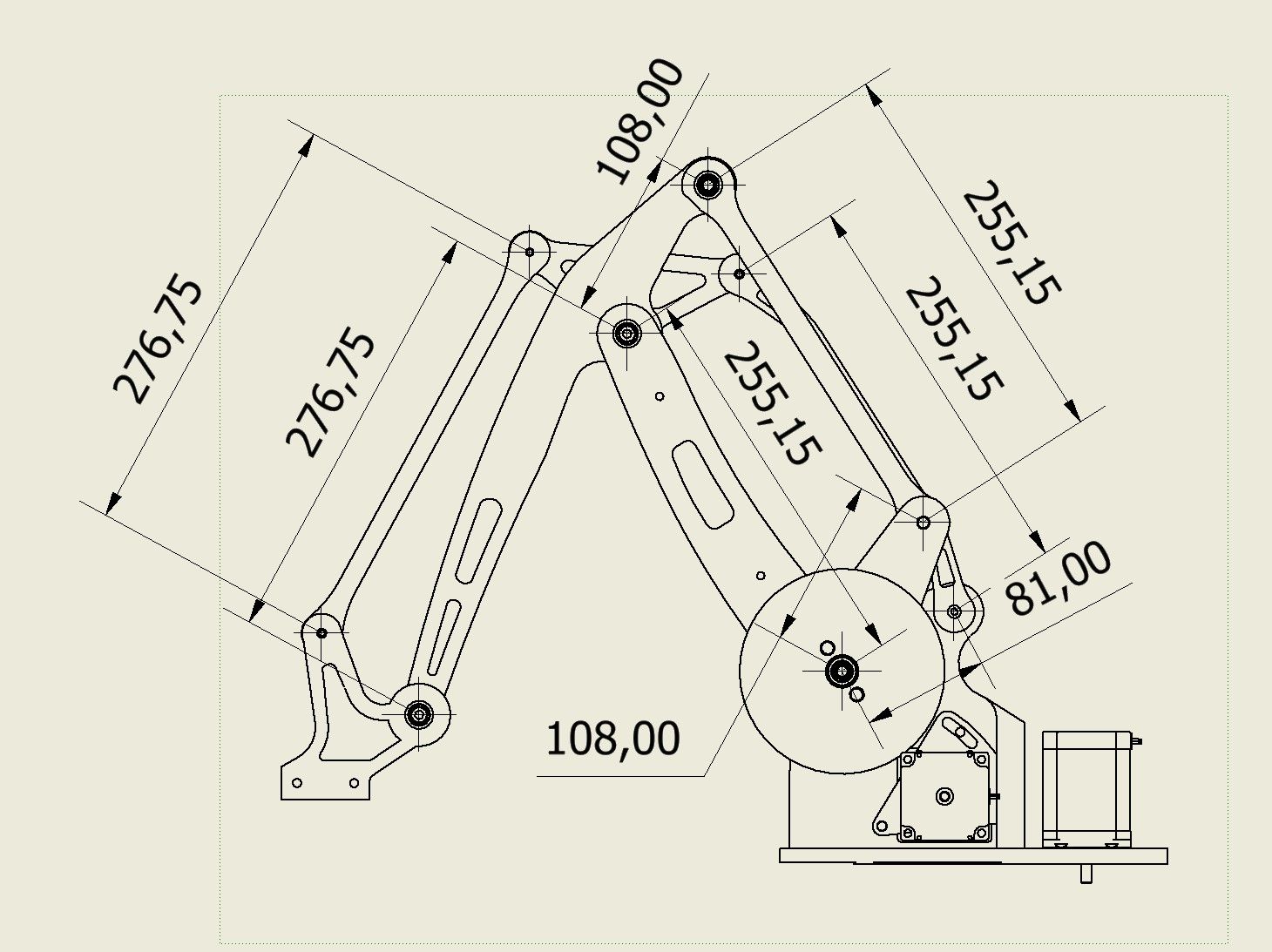
I do have a fysikal protorype.  config (1).g
config (1).g