@ccs86 Yes, such short move with high acceleration would cause big vibration
Posts made by leoyu
-
RE: Input shaping cant work with short moveposted in Firmware developers
-
RE: Input shaping cant work with short moveposted in Firmware developers
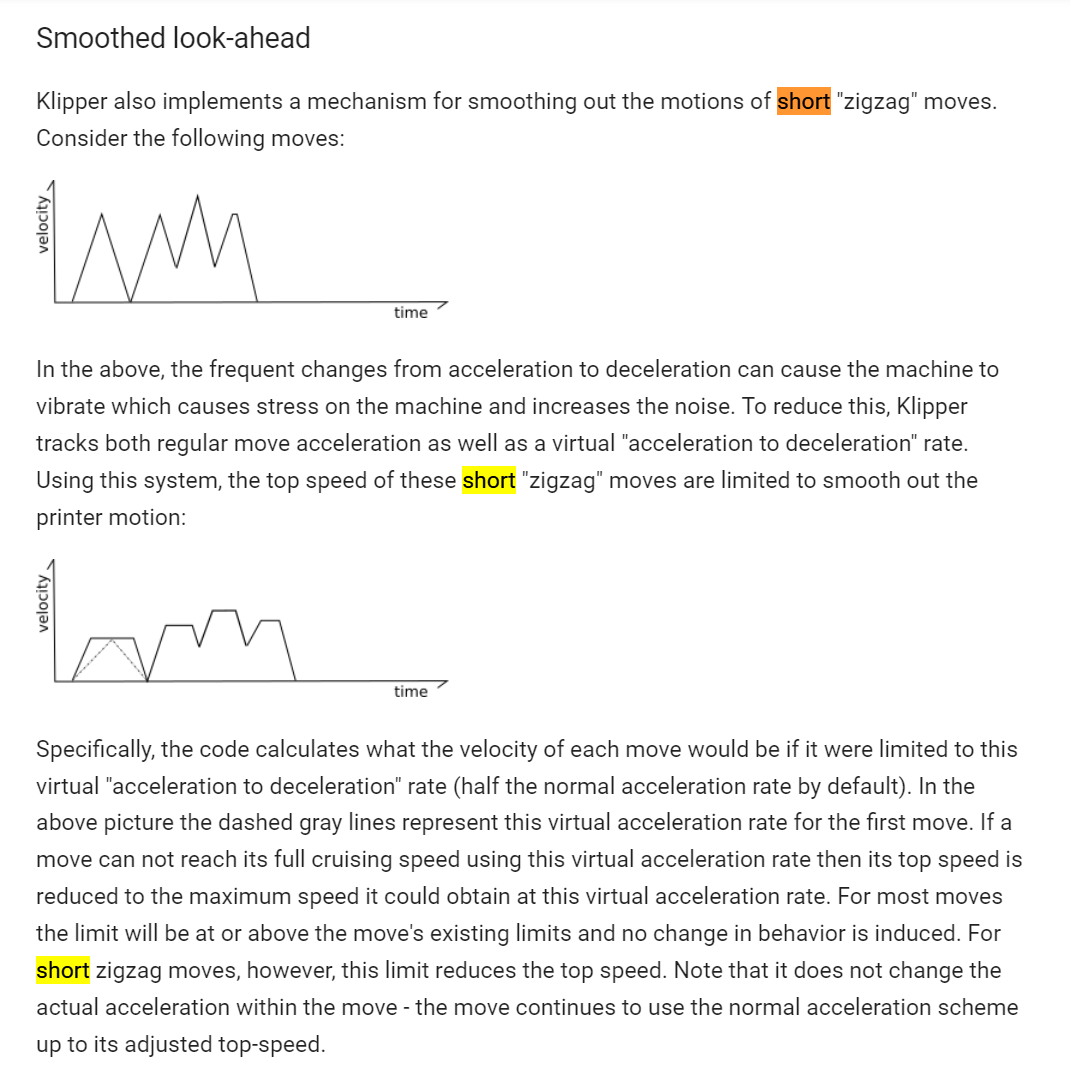
After reading the klipper document, the klipper would reduce the top speed to make sure there must be enough steady phase.
-
RE: Input shaping cant work with short moveposted in Firmware developers
I tried L parameter but not work still get high vibration
This is my config:
M203 X30000 Y30000 Z300 E3000:3000
M201 X10000 Y10000 Z100 E10000:10000
M203 P10000 T10000
M566 X300 Y300 Z60 E300:300
M593 P"mzv" L100
the following is my test gcode:
G28
G1 Z10 F300
G0 X200 Y200 F12000
G0 X198 Y200 F12000
G0 X200 Y200 F12000
G0 X198 Y200 F12000with klipper it can move smoothly, but RRF3.4 it get very high vibration
-
Input shaping cant work with short moveposted in Firmware developers
Hello, i am trying the input shaping feature with RRF 3.4. I used to have a good result with klipper but failed with RRF 3.4. The cause i found is the move is very short (like 2mm with 10000 acc)will not shaping the command. Could anyone have idea to fix this issue?
-
RE: SAM4E16E build configurationposted in Firmware developers
@chrishamm hi chrishamm, when compile SAM4E16E , i get the question with link script, hope to get your help.
1.which folder is the linker script file located,how can i find the linker script for SAM4E16E2.if I get the linker script, may I just modify some parameters in linker script of SAM4E8E to match SAM4E16E, when I attempt to use the same coreng to be compatible with SAM4E8E and SAM4E16E in different project
3 .what if i write the BIN file built under SAM4E8E project into SAM4E16E chip
Many thanks -
RE: SAM4E16E build configurationposted in Firmware developers
@chrishamm Thank you, this is good info
-
SAM4E16E build configurationposted in Firmware developers
Hi,i want to replace SAM4E8E with SAM4E16E. I don’t know if there are any other differences than the amount of flash. The CoreNG only has build configuration with SAM4E8E, could this configuration work for SAM4E16E?
-
RE: Move fast on new axis U for right x carriageposted in Firmware developers
@dc42 Thank you , i have fixed it.

-
RE: Move fast on new axis U for right x carriageposted in Firmware developers
After a day of trying, I found the cause is after switching to tool 1, i used to send "G0 F6000 U100 Y10". But after mapping X movement to U axis, i need to change the command back to "G0 F6000 X100 Y10", it didn't need to replace X with U anymore. So the new question is how to manager the command for duplicate mode, the old command for duplicate command like "G0 F6000 X100 U200 Y0".
-
RE: Move fast on new axis U for right x carriageposted in Firmware developers
@dc42 thank you for your reply, i have fix it by change M563 P1 D1 H2 X3, the old command i use is M563 P1 D1 H2. When define tool 1, i didn't map X movement to the U axis. However, i encounter sevral strange problem after change this command. One of the issues is after switching to tool 1, when i send G1 F200 Z0.5. The right X carriage would move back to about 5 mm around the right endstop. Here is my tool define config:
; Tools
M563 P0 D0 H1 X0 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C
M563 P1 D1 H2 X3 ; Define tool 1
G10 P1 U0 Y0 Z0 ; Set tool 1 axis offsets
G10 P1 R0 S0 ; Set initial tool 1 active and standby temperatures to 0C
M563 P2 D0:1 H1:2 X0:3 ; Define tool 2
M567 P2 E1.0:1.0 ; define mix ratio for tool 2
G10 P2 X0 U0 Y0 Z0 ; Set tool 2 axis offsets
G10 P2 R0 S0 ; Set initial tool 2 active and standby temperatures to 0CCould you explain how the right X carriage move after map to X movement, thank you very much
-
RE: Move fast on new axis U for right x carriageposted in Firmware developers
yes, all the stepper motors are same.
-
Move fast on new axis U for right x carriageposted in Firmware developers
I'm using extra U axis on E2_AXIS for the right x carriage.
When i send G0 F6000 X100 Y100, the X,Y axis can move properly, but when i send G0 F6000 U100 Y100 the u axis move much faster than x axis. The acceleration and jerk for X and U are same. I think it should be caused by the default move axes is X, Y, Z, i dont know how to add a new move axes with the config. Here is my config.g, hope someone can help me. My firmware version is 2.02RC release.
; Drives
M569 P0 S0 ; Drive 0 goes forwards
M569 P1 S0 ; Drive 1 goes forwards
M569 P2 S0 ; Drive 2 goes forwards
M569 P3 S1 ; Drive 3 goes forwards
M569 P4 S1 ; Drive 4 goes forwards
M569 P5 S0 ; Drive 4 goes forwardsM584 X0 Y1 Z2 E3:4 U5 ; create the U axis and assign stepper driver 5 to it
M350 X256 Y256 Z256 E256:256 U256 I0 ; Configure microstepping without interpolationM92 X1280 Y1281 U1280 Z6400 E4350:4350 ; Set steps per mm
M566 X300 Y300 U300 Z24 E100:100 ; Set maximum instantaneous speed changes (mm/min)
M203 X9000 U9000 Y9000 Z950 E3000:3000 ; Set maximum speeds (mm/min)
M201 X1500 U1500 Y1500 Z100 E3000:3000 ; Set maximum accelerations (mm/s^2)