Upgrading from RRF2 to RRF3 issues
-
@Foden
This is my original working RRF2 config.gOriginal RRF2 config.g
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool on Sun Sep 09 2018 17:28:37 GMT-0600 (Mountain Daylight Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder movesM667 S1 ; select CoreXY mode
; Network
M550 PLB-HEVO ; set machine name
M551 PXXXXXXXXXX ; set password
M552 S1 ; Enable network
M587 S"XXXXXXXXXXXXX" P"XXXXXXXXXXXXXXX" ; Configure access point. You can delete this line once connected
M586 P0 S1 ; Enable HTTP
M586 P1 S0 ; Disable FTP
M586 P2 S0 ; Disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S0 ; physical drive 1 goes backwards
M569 P2 S0 ; physical drive 2 goes backwards
M569 P3 S1 ; physical drive 3 goes forwards
; physical drive 3 goes forwards
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X79.29 Y79.48 Z400.63 E467.00 ; set steps per mm - calibrated from 20mm cube Jan 13 2018M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X8000.00 Y8000.00 Z2000.00 E1000.00 ; set maximum speeds (mm/min)
M201 X2000 Y2000 Z400 E10000 ; set maximum accelerations (mm/s^2)
M906 X1500 Y1500 Z1200 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X275 Y275 Z300 S0 ; set axis maxima; Endstops
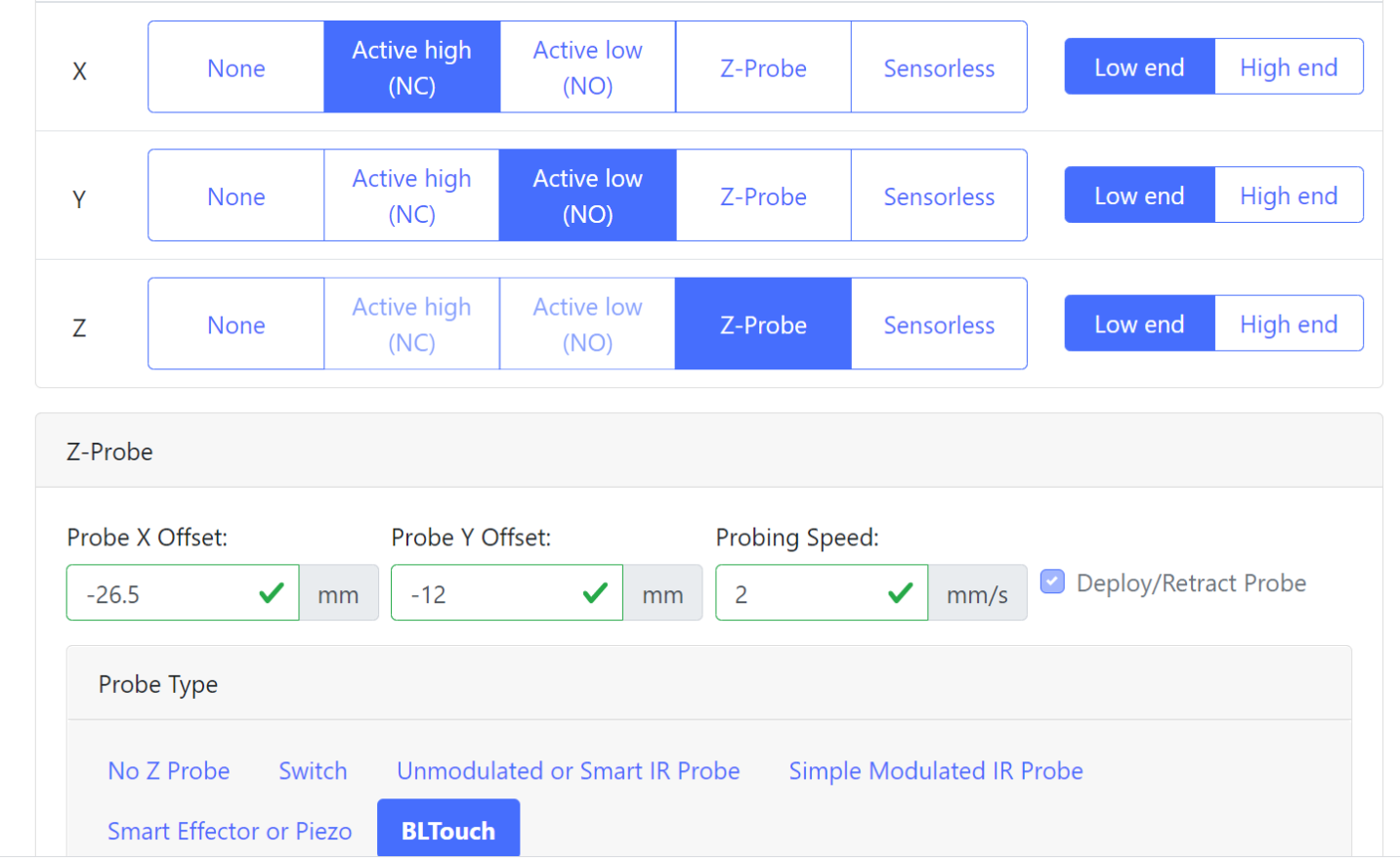
M574 X1 S1 ; set active high endstops
M574 Y1 S0 ; set active high endstops
M574 Z1 S2 ; set endstops controlled by probe; Z-Probe
M307 H7 A-1 C-1 D-1 ; disable the 7th Heater to free up PWM channel 5 on the Duex board
M558 P9 H5 R0.3 F1000 T4000 X0 Y0 Z1 A4 S0.04 ; set Z probe type/mode 9. H=Dive Height. F=Speed the bed
G31 P25 X-26.5 Y-12 Z2.14 ; Z probe trigger value, offset in relation to nozzle. And trigger height adjustment
M557 X0:275 Y15:275 S30 ; define mesh grid - S=spacing between points in mm; Heaters
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M305 P0 T100000 B4725 C0 R4700 ; set thermistor + ADC parameters for heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M305 P1 T100000 B4725 C7.060000e-8 R4700 ; set thermistor + ADC parameters for heater 1
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
;Fan 0-Bed, 1-Hotend
M106 P0 H-1
M106 P1 T45 H1 ;Hot End fan, thermostatic control is turned on at 45c runs at 100%; Tools
M563 S"Nozzle1" P0 D0 H1 ; Define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings
;Correct CPU temp
M912 P0 S-10.1; Miscellaneous
M501 ; Load saved parameters from non-volatile memory -
Your motor currents are much lower in our RRF3 config.
M574 S0 is not supported in RRF3 anymore.
https://duet3d.dozuki.com/Wiki/Gcode#Section_M574_RepRapFirmware_Num_3
Endstop type S0 (active low switch) is no longer supported in M574 commands. Instead, use type S1 and invert the input by prefixing the pin name with '!'. Ex: M574 X1 S1 P"!xstop". Invert the input when using an NPN output inductive or capacitive sensor, or using a NO switch (not recommended, use a NC switch instead).
So that may explain your Y endstop issue.
Use
M574 Y1 S1 P"!ystop"instead.For the BLTouch you have
M558 P9 C"zprobe.in+zprobe.mod" H5 F120 T6000remove the+zprobe.modpart. The modulation shouldn't be used. In the configurator it is selected by default and should be deselected. It's on the change list to have that fixed as it tends to catch people out quite often. Sorry about that.Also for the BLTouch, what do you have for your deploy and retract macros? Does M401 and M402 work to deploy and retract the pin?
-
@Foden said in Upgrading from RRF2 to RRF3 issues:
M558 P9 C"zprobe.in+zprobe.mod" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
Recent versions of BLTouch need the pullup resistor enabled too:
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@Phaedrux Thanks Phaedrux
Motor currents - looks like i messed up there as it is taking the values now
Missed the M574 info - thought i had read it all properly, obviously not and appreciate the heads up. However that code was all created by the configuration tool
BLTouch - yes M401 & M402 work as expected
; deployprobe.g
; called to deploy a physical Z probe
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Sun May 03 2020 18:10:19 GMT-0600 (Mountain Daylight Time)
M280 P0 S10 ; deploy BLTouch; retractprobe.g
; called to retract a physical Z probe
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Sun May 03 2020 18:10:19 GMT-0600 (Mountain Daylight Time)
M280 P0 S90 ; retract BLTouch -
-
@Foden Quick and outstanding support as ever - THANK YOU guys
Homing of the Y axis now works as expected as does the BLTouch. So was I selecting the wrong thing(s) here are there changes coming for the config tool? I was trying to keep my initial, baseline, config clean and created by the config tool before I dirty it with tweaking and fiddling with it
-
The config tool is yet to be updated fully and is still outputting S0 rather than ! on the pin. It's on the list for the next update.
Glad it's working though,
-
Just noticed that if i do X home more than once (paranoia kicking in) X axis keeps moving to the right. Checked the endstop status and X is showing as triggered regardless of whether it actually is or not. Haven't messed with any cables and the optical sensor itself was working properly
; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"!ystop" ; configure active-low endstop for low end on Y via pin ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-26.5 Y-12 Z2.14 ; set Z probe trigger value, offset and trigger height
M557 X20:275 Y20:275 S20 ; define mesh gridStepped away from it for awhile, hit the emergency stop so it knows I'm still in charge and now it works like it should
No sane person would build their own 3D printer I guess
Thanks again!
-
Given that this is a CoreXY we should verify that your motor directions are correct and that you are configured to use a right hand coordinate system.
I'll point you to this post which goes through the steps of verifying that everything is set correctly (end stop positions, homing directions, and motor rotations)
https://forum.duet3d.com/topic/12676/mirrored-x-axis/9?_=1588616543576
-
I looked through the link
Motor directions are correct and haven't changed since original setup some years ago. Y endstop was changed when an optical sensor died and I only had mechanical spares so it was swapped and I haven't swapped it back since
As I mentioned, once I left it alone and the hit the emergency button all is well - go figure
-
@Foden said in Upgrading from RRF2 to RRF3 issues:
Just noticed that if i do X home more than once (paranoia kicking in) X axis keeps moving to the right. Checked the endstop status and X is showing as triggered regardless of whether it actually is or not. Haven't messed with any cables and the optical sensor itself was working properly
Is this with RRF 3.0 or with RRF 3.01-RC11 ? I recommend you use 3.01-RC11.
-
@dc42 said in Upgrading from RRF2 to RRF3 issues:
3.01-RC11
It was with 3.01-RC11 - once I left it alone and the hit the emergency button all was well