Upgrading from RRF2 to RRF3 issues
-
@Foden said in Upgrading from RRF2 to RRF3 issues:
M558 P9 C"zprobe.in+zprobe.mod" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
Recent versions of BLTouch need the pullup resistor enabled too:
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@Phaedrux Thanks Phaedrux
Motor currents - looks like i messed up there as it is taking the values now
Missed the M574 info - thought i had read it all properly, obviously not and appreciate the heads up. However that code was all created by the configuration tool
BLTouch - yes M401 & M402 work as expected
; deployprobe.g
; called to deploy a physical Z probe
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Sun May 03 2020 18:10:19 GMT-0600 (Mountain Daylight Time)
M280 P0 S10 ; deploy BLTouch; retractprobe.g
; called to retract a physical Z probe
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Sun May 03 2020 18:10:19 GMT-0600 (Mountain Daylight Time)
M280 P0 S90 ; retract BLTouch -
-
@Foden Quick and outstanding support as ever - THANK YOU guys
Homing of the Y axis now works as expected as does the BLTouch. So was I selecting the wrong thing(s) here are there changes coming for the config tool? I was trying to keep my initial, baseline, config clean and created by the config tool before I dirty it with tweaking and fiddling with it
-
The config tool is yet to be updated fully and is still outputting S0 rather than ! on the pin. It's on the list for the next update.
Glad it's working though,
-
Just noticed that if i do X home more than once (paranoia kicking in) X axis keeps moving to the right. Checked the endstop status and X is showing as triggered regardless of whether it actually is or not. Haven't messed with any cables and the optical sensor itself was working properly
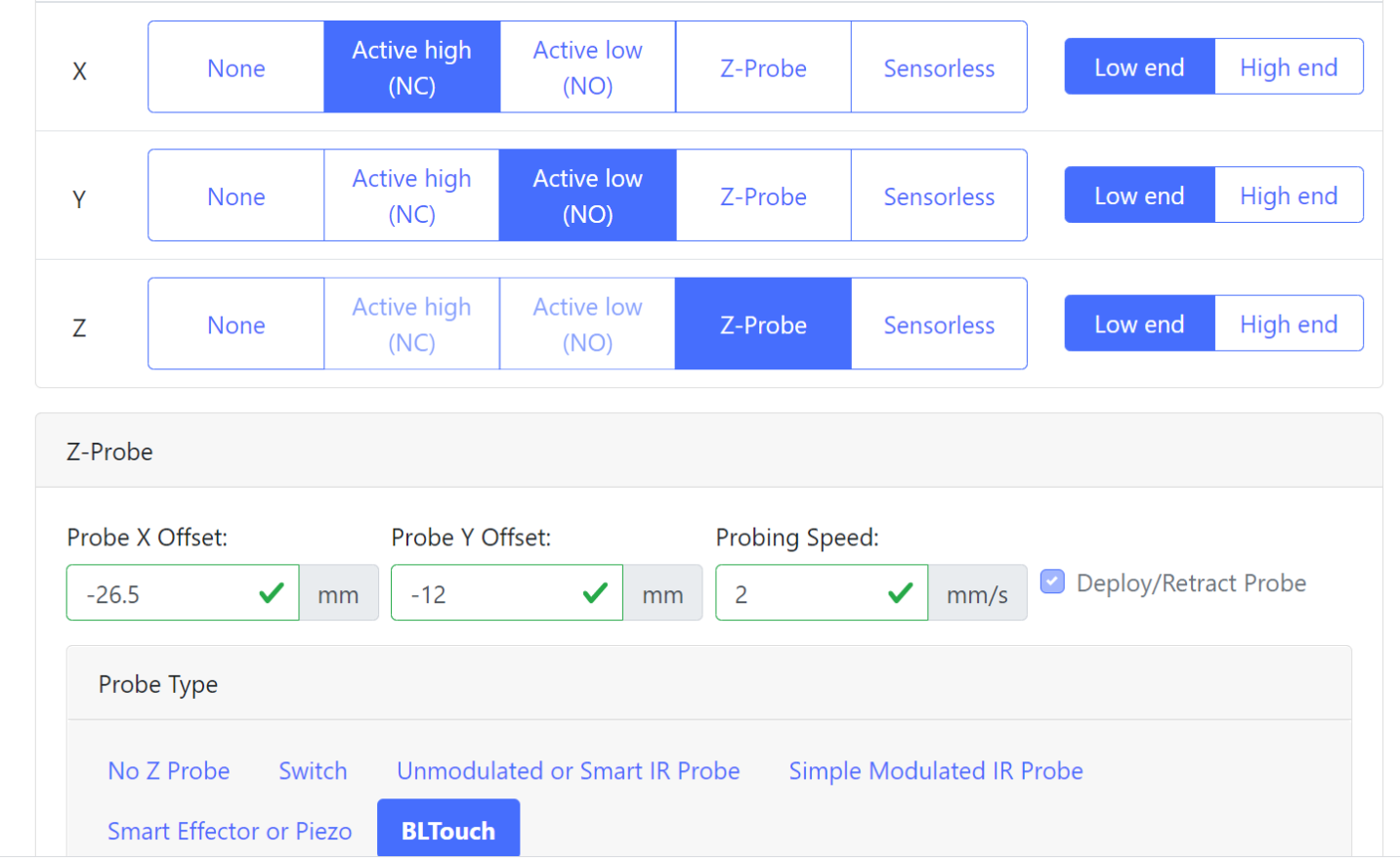
; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"!ystop" ; configure active-low endstop for low end on Y via pin ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-26.5 Y-12 Z2.14 ; set Z probe trigger value, offset and trigger height
M557 X20:275 Y20:275 S20 ; define mesh gridStepped away from it for awhile, hit the emergency stop so it knows I'm still in charge and now it works like it should
No sane person would build their own 3D printer I guess
Thanks again!
-
Given that this is a CoreXY we should verify that your motor directions are correct and that you are configured to use a right hand coordinate system.
I'll point you to this post which goes through the steps of verifying that everything is set correctly (end stop positions, homing directions, and motor rotations)
https://forum.duet3d.com/topic/12676/mirrored-x-axis/9?_=1588616543576
-
I looked through the link
Motor directions are correct and haven't changed since original setup some years ago. Y endstop was changed when an optical sensor died and I only had mechanical spares so it was swapped and I haven't swapped it back since
As I mentioned, once I left it alone and the hit the emergency button all is well - go figure
-
@Foden said in Upgrading from RRF2 to RRF3 issues:
Just noticed that if i do X home more than once (paranoia kicking in) X axis keeps moving to the right. Checked the endstop status and X is showing as triggered regardless of whether it actually is or not. Haven't messed with any cables and the optical sensor itself was working properly
Is this with RRF 3.0 or with RRF 3.01-RC11 ? I recommend you use 3.01-RC11.
-
@dc42 said in Upgrading from RRF2 to RRF3 issues:
3.01-RC11
It was with 3.01-RC11 - once I left it alone and the hit the emergency button all was well