Windows unable to flash Duet3 despite BOSSA port showing...
-
Flash with bossac from Raspberry Pi was a success, with the same cable.
title cont'd ... up in Device Manager and CPU identified in BOSSA software.Duet 3 is running RRF 3.0 stable, with DSF 1.2.2.1 from the stable list.
DuetWebControl is working on Pi and from computer, config as shown but motors do not turn or energize despite DWC showing axis positions increasing.
-
Windows unable to flash Duet3 despite BOSSA port showing up in Device manager and CPU identified in BOSSA software.

; Configuration file for Duet 3 (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v2.1.8 on Mon May 04 2020 13:19:51 GMT-0600 (Mountain Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Duet 3" ; set printer name ; Drives M569 P0.0 S1 ; physical drive 0.0 goes forwards M569 P0.1 S1 ; physical drive 0.1 goes forwards M569 P0.2 S1 ; physical drive 0.2 goes forwards M584 X0.0 Y0.1 Z0.2 ; set drive mapping M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M92 X53.33 Y53.33 Z53.33 ; set steps per mm M566 X900.00 Y900.00 Z12.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X1000 Y1000 Z1000 S0 ; set axis maxima ; Endstops ; WARNING: No endstops configured ; Z-Probe M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed M557 X0:1000 Y0:1000 S50 ; define mesh grid ; Heaters ; Fans ; Tools ; Custom settings are not defined code_text
-
Hi Jim, can you also provide the results of M122?
-
I had something similar happen a few days ago i was able to Flash again with an older version of the firmware
-
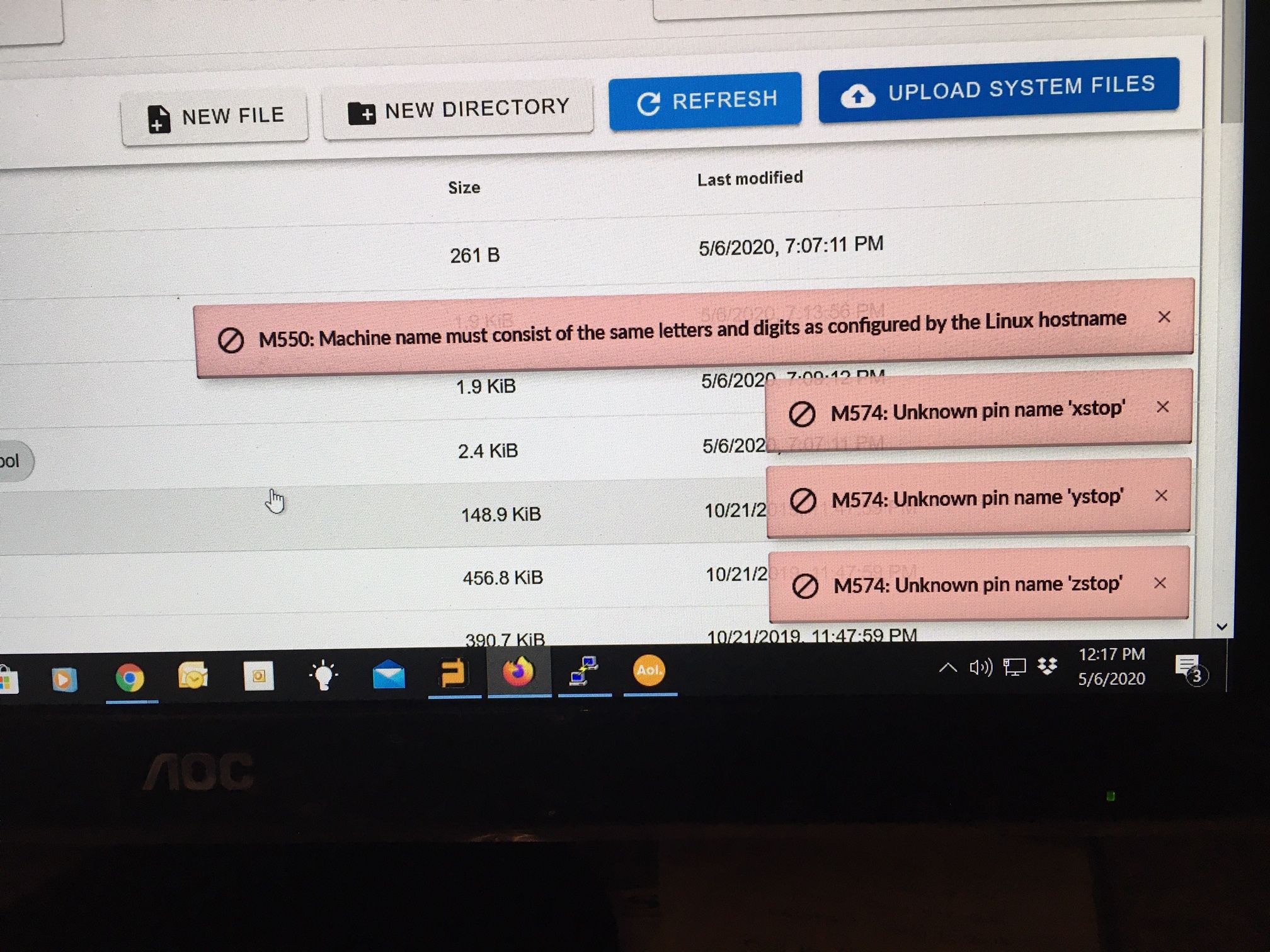
Upon updating the RFF to get fresh files for the DWC and restarting it i get the following warnings:

Not sure how to address the M550 message... -
Hi Phaedrux, Here are the M122 results...
5/6/2020, 12:19:16 PM M122 === Diagnostics === RepRapFirmware for Duet 3 v0.6 version 3.0beta11 running on Duet 3 version v0.6 Board ID: 08DJM-956L2-G43S4-6J9F8-3SJ6R-9B6AG Used output buffers: 1 of 32 (7 max) === RTOS === Static ram: 68792 Dynamic ram: 171592 of which 52 recycled Exception stack ram used: 300 Never used ram: 152480 Tasks: NETWORK(ready,1980) HEAT(blocked,1420) CanReceiv(suspended,3808) CanSender(suspended,1476) CanClock(blocked,1432) TMC(blocked,216) MAIN(running,4416) IDLE(ready,156) Owned mutexes: === Platform === Last reset 00:05:11 ago, cause: software Last software reset at 2020-05-06 19:14, reason: Unknown, spinning module Platform, available RAM 152480 bytes (slot 2) Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x04429000 BFAR 0x00000000 SP 0xffffffff Task 0x4e49414d Error status: 0 Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest block write time: 0.0ms, max retries 0 MCU temperature: min 34.5, current 35.1, max 35.3 Supply voltage: min 23.7, current 23.8, max 23.8, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.1, under voltage events: 0 Driver 0: standstill, reads 7347, writes 14 timeouts 0, SG min/max 0/0 Driver 1: standstill, reads 7347, writes 15 timeouts 0, SG min/max 0/0 Driver 2: standstill, reads 7352, writes 11 timeouts 0, SG min/max 0/0 Driver 3: standstill, reads 7353, writes 11 timeouts 0, SG min/max 0/0 Driver 4: standstill, reads 7349, writes 15 timeouts 0, SG min/max 0/0 Driver 5: standstill, reads 7355, writes 11 timeouts 0, SG min/max 0/0 Date/time: 2020-05-06 19:19:15 Slowest loop: 7.04ms; fastest: 0.25ms === Move === Hiccups: 0, FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 === GCodes === Segments left: 0 Stack records: 1 allocated, 0 in use Movement lock held by null http is idle in state(s) 0 telnet is idle in state(s) 0 file is idle in state(s) 0 serial is idle in state(s) 0 aux is idle in state(s) 0 daemon* is ready with "M122" in state(s) 0 queue is idle in state(s) 0 lcd is idle in state(s) 0 spi is idle in state(s) 0 autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 0.80ms; fastest: 0.01ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 0 of 8 - Ethernet - State: 2 Socket states: 0 0 0 0 0 0 0 0 === CAN === Messages sent 0, longest wait 0ms for type 0 === Linux interface === State: 0, failed transfers: 0 Last transfer: 33ms ago RX/TX seq numbers: 47510/9933 SPI underruns 0, overruns 0 Number of disconnects: 0 Buffer RX/TX: 0/0-0 === Duet Control Server === Duet Control Server v1.1.0.5 Code buffer space: 4096 Configured SPI speed: 2000000 Hz Full transfers per second: 0.30``` code_text -
@Jim46 said in Windows unable to flash Duet3 despite BOSSA port showing...:
Not sure how to address the M550 message...
set the name after M550 to "duet3" or put a ; in front of M550 to eliminate it all together (its only really used when in stand alone mode)
-
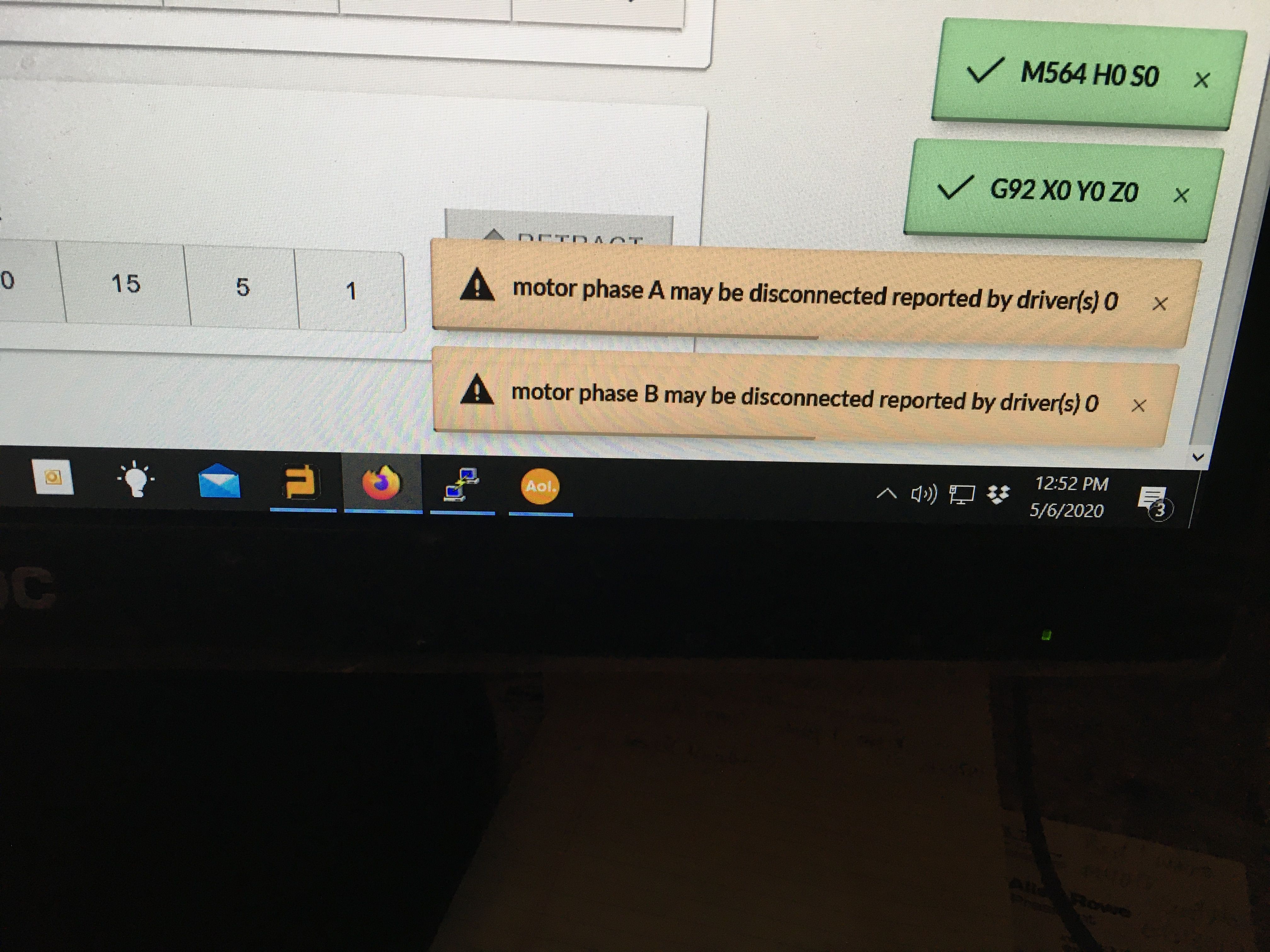
Wow! After the updates to RRF and DWC. I ran Z+25; Y+50 and X+50. Y and Z worked! Two motors on Y and two motors on Z and the both turned!
X+50 did nothing but gave me errors on being disconnected. It referenced drive 0. That one is empty. X motor is on 1 i hope.
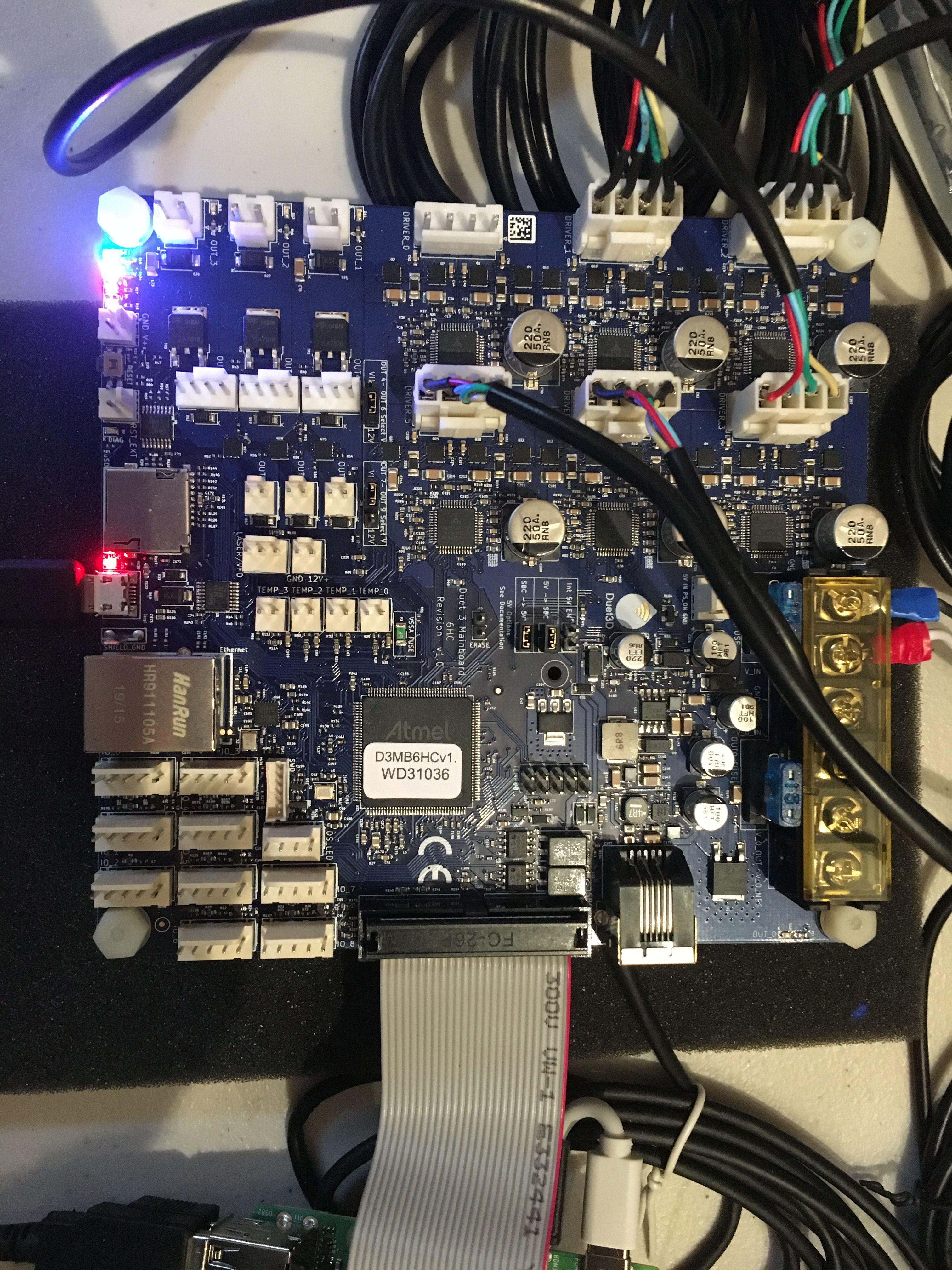
Here is the physical set up...

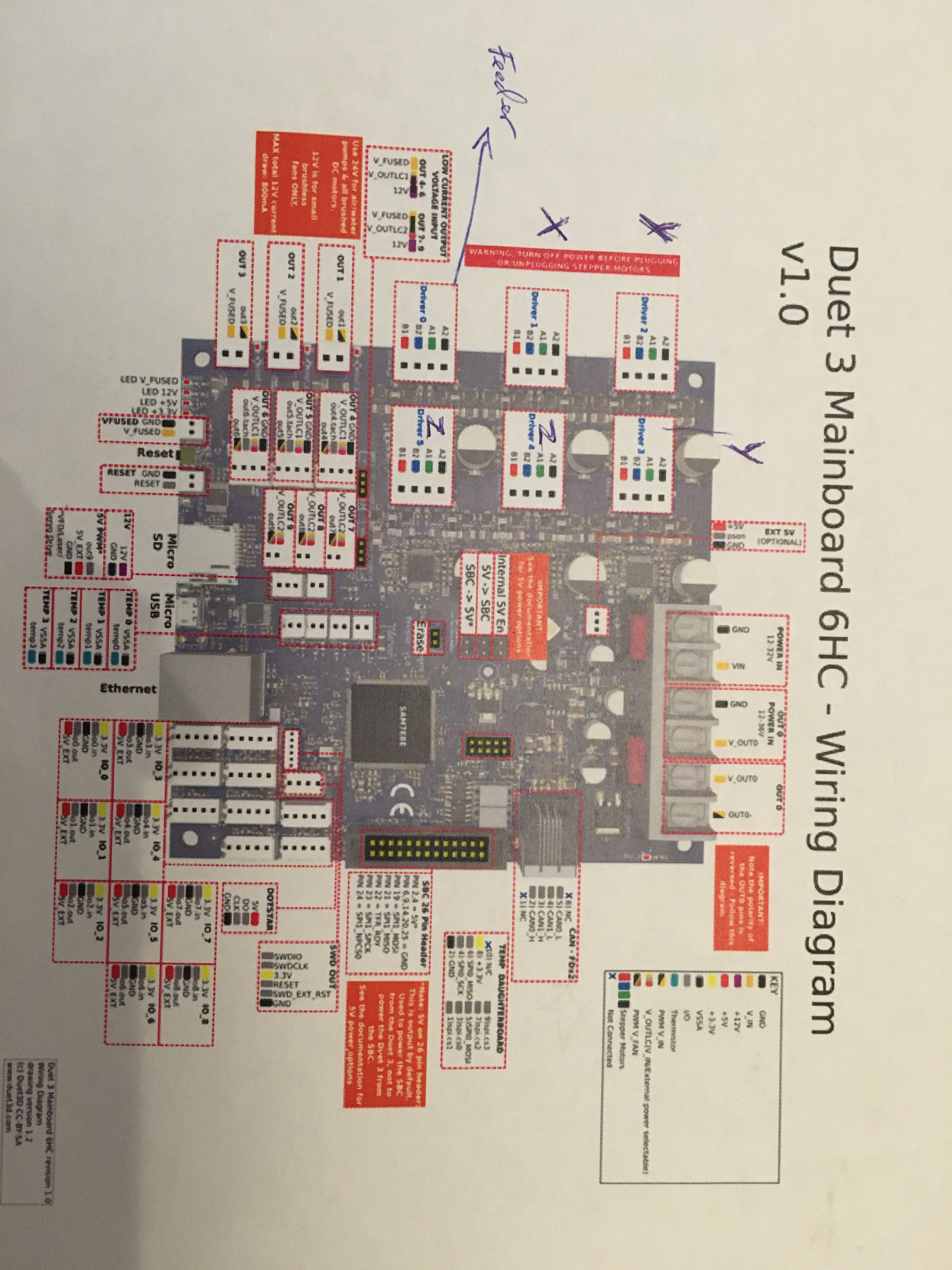
The Wiring diagram ...

-
Hi Jim, sounds like you've gotten some positive progress now.
-
@Jim46 said in Windows unable to flash Duet3 despite BOSSA port showing...:
X+50 did nothing but gave me errors on being disconnected. It referenced drive 0. That one is empty. X motor is on 1 i hope.
good progress, I think that is solved by changing the drive mapping to
M584 E0 X1 Y2:3 Z4:5 ; set drive mapping dual y on 2&3 + dual z on 4&5 -
@bearer said in Windows unable to flash Duet3 despite BOSSA port showing...:
M584 E0 X1 Y2:3 Z4:5 ; set drive mapping dual y on 2&3 + dual z on 4&5
Updated Config.g with this M584 code. Wonderful improvement.
Single X motor moves on + and - commands
Two Y motors move on + and - commands
Tried to run Z motors... gave + and - commands... the Y motors moved slowly in + and - directions.
No Z motor movement.
Here's is the config.g; Configuration file for Duet 3 (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v2.1.8 on Mon May 04 2020 10:26:28 GMT-0600 (Mountain Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"duet3" ; set printer name ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M569 P4 S1 ; physical drive 4 goes forwards M569 P5 S1 ; physical drive 5 goes forwards M584 E0 X1 Y2:3 Z4:5 ; set drive mapping dual y on 2&3 + dual z on 4&5 M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M92 X53.33 Y53.33 Z53.33 ; set steps per mm M566 X900.00 Y900.00 Z12.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X1000 Y1000 Z1000 S0 ; set axis maxima ; Endstops M574 X1 S1 P"io1.in" M574 Y1 S1 P"io2.in" M574 Z1 S1 P"io3.in" ; Z-Probe M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed M557 X0:1000 Y0:1000 S50 ; define mesh grid ; Heaters ; Fans ; Tools ; Custom settings are not defined M302 P1 ; allow cold extusion any ideas
-
@Jim46 said in Windows unable to flash Duet3 despite BOSSA port showing...:
M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M92 X53.33 Y53.33 Z53.33 ; set steps per mm M566 X900.00 Y900.00 Z12.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent Hi Jim, I think you'll need to set some values for the E axis in these commands.
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X53.33 Y53.33 Z53.33 E400 ; set steps per mm M566 X900.00 Y900.00 Z12.00 E2000 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E6000; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E3000 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent Note I just guessed at the values for steps per mm, etc etc for your extruder. You'd need to have an educated guess on what they should be.
-
I think its over to the config wizzards now, they're all over the forum:)
-
Hi Phaedrux,
Just edited config.g with your suggestions adding E400 to M92; E2000 to M566; E6000 to M203; and E3000 to M201.
No change to motor behavior. No Z motor movement. Y motors do both Y and Z commands. Some sort of motor confusion. -
Maybe roll back the dual motor drive and test each driver individually. Simplest would be to first test
M584 E0 X1 Y2 Z4 and then M584 E0 X1 Y3 Z5 and see what moves.
if you put all three lines in your config.g file you can easily select which is inactive by placing a ; in from of them.
so test Y on driver 2 + Z on driver 4
;M584 E0 X1 Y2:3 Z4:5 ; set drive mapping dual y on 2&3 + dual z on 4&5 M584 E0 X1 Y2 Z4 ;M584 E0 X1 Y3 Z5then test Y on driver 3 + Z on driver 5
;M584 E0 X1 Y2:3 Z4:5 ; set drive mapping dual y on 2&3 + dual z on 4&5 ;M584 E0 X1 Y2 Z4 M584 E0 X1 Y3 Z5and when you're ready to go back do the original
M584 E0 X1 Y2:3 Z4:5 ; set drive mapping dual y on 2&3 + dual z on 4&5 ;M584 E0 X1 Y2 Z4 ;M584 E0 X1 Y3 Z5 -
Hi Bearer, here is the setup now
M569 P4 S1 ; physical drive 4 goes forwards M569 P5 S1 ; physical drive 5 goes forwards M584 E0 X1 Y2 Z4 ; set drive mapping dual y on 2&3 + dual z on 4&5 M584 E0 X1 Y3 Z5 ; new set up 050820 date M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M92 X53.33 Y53.33 Z53.33 E400 ; set steps per mm M566 X900.00 Y900.00 Z12.00 E2000 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E6000 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E3000 ; set accelerations (mm/s^2) First test: This set up caused the X motor to run as expected.
Also a single Y motor moved (Not both)
And, wonderful, now a Z motor moved (not both).
I would have expected both Y motors and Z motors to move together/
Is there something I've not set right?
thanks,
Jim -
Only one M584 line at the time and test the drivers do work independently.
The ideal outcome is y on driver 2 moves and z on driver 4 moves, then put in the second line and hopefully y on driver 3 and z on driver 5 will move.
then after verifying each move independently get back to trying to get both to move.
-
more precisely;
X motor on Driver 1 moved +/-
Y motor on Driver 3 moved +/-
Z motor on Driver 5 moved +/-Driver 2 & 4 no response.
-
@Jim46 said in Windows unable to flash Duet3 despite BOSSA port showing...:
Driver 2 & 4 no response.
presumably because the second M584 line overrode the first; remove or comment out the second line and verify drivers 2 and 4 work.
-
M569 P5 S1 ; physical drive 5 goes forwards M584 E0 X1 Y2 Z4 ; set drive mapping dual y on 2&3 + dual z on 4&5 ;M584 E0 X1 Y3 Z5 ; new set up 050820 date M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation this caused:
Succcesful movements,
Y motor on Driver 2 moves +/-
Z motor on Driver 4 moves +/-