sensorless homing does not detecting motor stall
-
Hi guys,
I was trying to use sensorless homing on my X Y U axis, for some reason it is not detecting the motor stall. I've tried to reduce the motor current during the homing process and lowered the sensitivity of stall detection. but it still doesn't work.
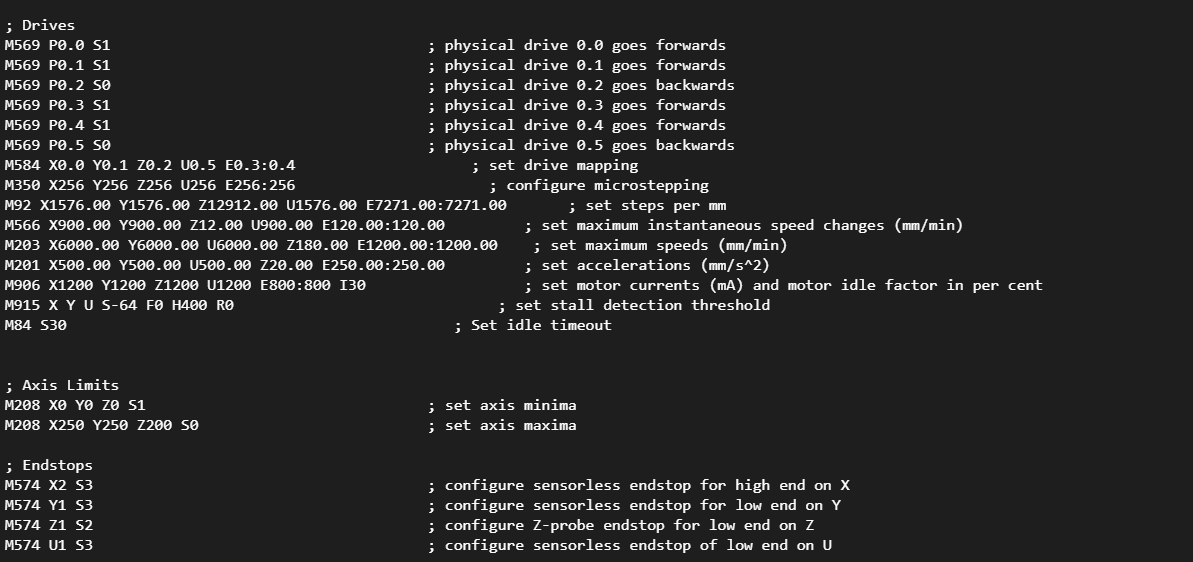
config.g:
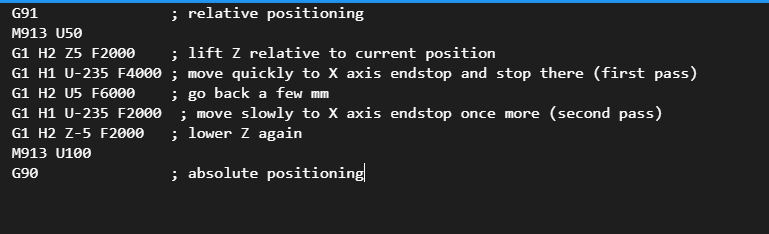
homeu.g:
I'm suspecting that I didn't lower the sensitivity in the right place. -
What duet board are you using? The maestro drivers do not have stallguard.
-
@Phaedrux I'm using duet 3 6hc.
-
The most common reason for stall not being detected is that the movement speed is below the stall detection threshold speed. See the M915 H parameter.
-
https://duet3d.dozuki.com/Wiki/Stall_detection_and_sensorless_homing
I assume you've read this?
Have you worked out the correct H parameter for M915?
-
@Phaedrux the H value I calculated is around 200, I tried using this value for H but it still didn't work. I also read that I can try to increase the H parameter and movement speed to solve the problem, so I tried doubling the H value and feed rate for the motor, still noting.
-
I notice that you're trying to use native x256 microstepping leading to some very large steps per mm values. I suggest trying with x16 with interpolation to 256 enabled to start with. Only increase the native microstepping value if needed.
-
@Phaedrux so I just tried lowering the micro-stepping to x16, and it kind of works. the motor ram the carriage to the side and stall for about 40 steps (the belt skips), then it somehow detects it and the process repeat. Question: about the H value should I use the motor rated resolution for full_steps_per_rev or should I also take micro-stepping into account? i.e. if I use 256 micro-stepping the full_steps_per_rev in H should be 256*(360/rated resolution).
-
@rafe said in sensorless homing does not detecting motor stall:
@Phaedrux the H value I calculated is around 200, I tried using this value for H but it still didn't work. I also read that I can try to increase the H parameter and movement speed to solve the problem, so I tried doubling the H value and feed rate for the motor, still noting.
If the stall is never detected, then the movement speed (in your G1 H1 homing command) is too low (or to put it another way, the M915 H parameter is too high for that movement speed). You appear to have 6.16 full steps/mm, so H200 translates to (200/6.16) = 32.5mm/sec. This is the belt speed, so if it's a CoreXY machine then the axis speed will be
sqrt(2) timesdouble this, i.e. around50mm/sec65mm/sec. So your 4000mm/min (66.7mm/sec) initial homing speed should be high enough. But as you are using very high microstepping, you may not be achieving 4000mm/min.Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@rafe said in sensorless homing does not detecting motor stall:
Question: about the H value should I use the motor rated resolution for full_steps_per_rev or should I also take micro-stepping into account? i.e. if I use 256 micro-stepping the full_steps_per_rev in H should be 256*(360/rated resolution).
The H value is given in full steps/second, so you don't need to adjust it for microstepping.
-
@dc42 I tried increasing the feed rate druing homeing to 16000 and it worked. thanks for your help.
-
@rafe said in sensorless homing does not detecting motor stall:
@dc42 I tried increasing the feed rate druing homeing to 16000 and it worked. thanks for your help.
6000 should be high enough.