well i thought i was done... y layer shifting!!!! argh
-
Ok, so ive already checked all my mechanicals, i took the bed off to verify and i tightened up everything that i could.
that didnt solve it.
when i slow the print right down it prints fine (2000mm/m)
but when i try and print at 2800 its all over the place. i used to be able to print at 3200 or higher.im kind of stumped as to what it could be.
its a cartesian printer
it only shifts in the Y direction and always to be the back of the printer
printing on a new buildtak flex plate
there are no clips that could be loosealso you can see in the second print that perhaps the extruder might be missing steps?
i didnt hear any skipping or grinding. basically it looks as if the nozzle height adjusted down for a bit and came back up. cuz you can see the layers lines its just theres almost no filament in there.

-
You may need to reduce your jerk and accel on the Y axis for a cartesian due to the weight of the bed.
Are your motor currents set to 85% of the rated max for the motor?
-
@Phaedrux i thought i went through this step how ever it looks like i didnt,
i also another user (mod i think but ill check modified the jerk and accel settings on my config.g a while back in one of my other posts. it looks like i possibly didnt switch it back after changing from my stock settings.
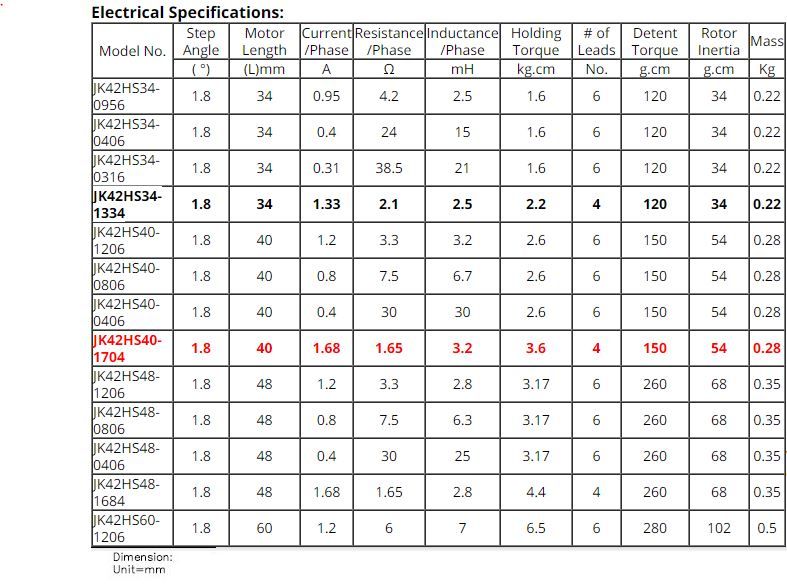
also for some reason i dont remember ever looking up the specs on my 42HS40-1704JA steppers how ever it looks like they can max rated current at 1.7A, which seems awefully high compared to the robo 3d forum where theyre some where around the .6A.
i cannot how ever locate the exact JA suffix for any spec sheet any where. so if i was to base it off the 1704 it should be at 1.445A.
which it currently isnt.
ive found this spec sheet,
https://www.electronicoscaldas.com/datasheet/JK42HSxx-Series_Jkong-Motor.pdf
as well as these,
-
If you can't find the exact model number in the spec sheet you can usually get close by finding one the same length as it's usually the length that determines the size of the coils, etc.
-
@Phaedrux all ofmy motor lengths are 39mm long from plate to plate
-
i just found a post that says that it should be some where between 1.4-1.8amps. so i think the 1.4 should be suffient.
-
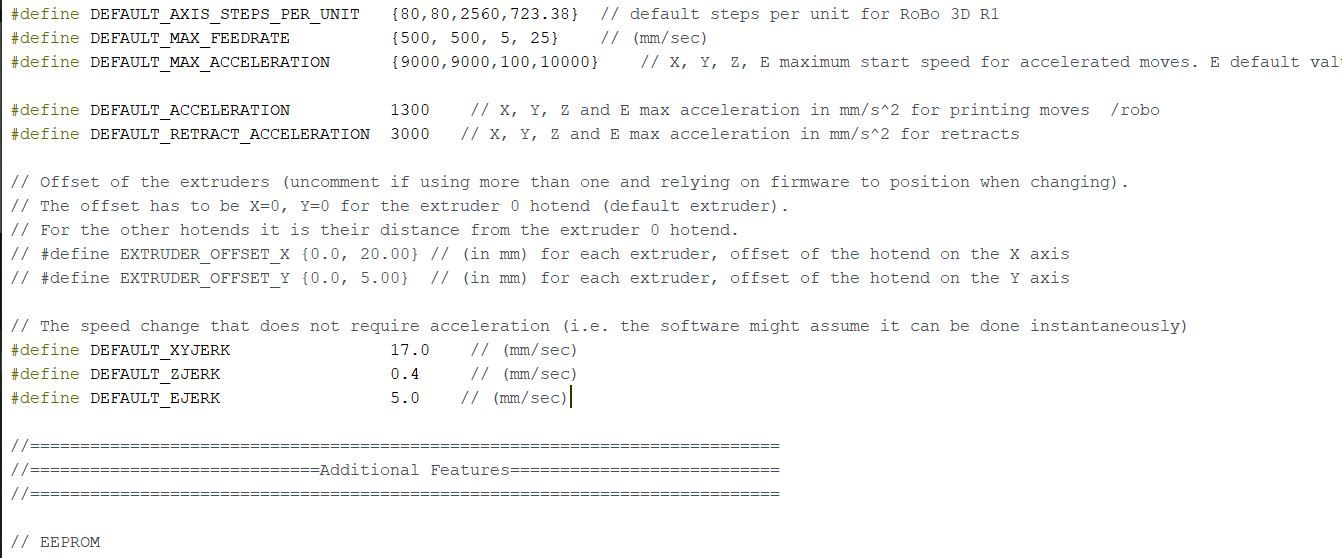
@Phaedrux also i just loaded my old firmware that was on previous to loading the Duet on and checked the settings in there.
the old firm ware had it listed in MM/S when converted over the jerk settings are spot on
1020/60=17 for the Y axis
-
Default accel is a lot lower though. Maybe try adding
M204 P1000 T4000to specify a lower print move accel and faster (but still lower than you had) travel accel. -
@Phaedrux i have made the current changes and it made a difference, for a while.
than i printed a small model and the top 3 layers shifted.
i know that the default is actually set to 1300, but i cannot find any place to insert that into default values
-
-
lol i see that now!