Duet 3 StealthChop 2 Tuning for Nema23
-
bumpity bump
-
Are you sure that you are not hitting mid-band resonance?
PS - what M915 H and M569 V parameters are you using?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I don't know; according to the EMF calculator I should have a lot of overhead
This is the previous, 8.5mH stepper,

Compared to the new one with 3.4mH inductance; gives 3x faster speed yet it seizes at the same speed

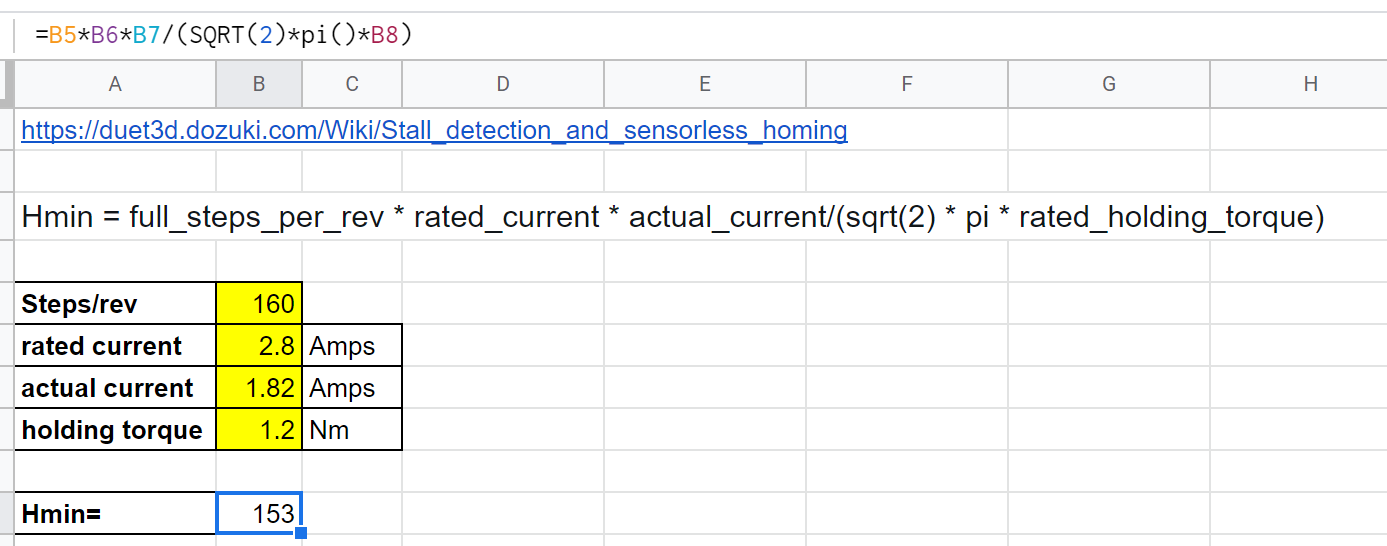
M915 as following:
; Stealthchop parameters M915 P0 S3 F1 H153 T1 R0 M915 P1 S3 F1 H153 T1 R0And was calculated according to
And M569 V is high enough I recall just above 200mm/s
M569 P0 V30 H5 M569 P1 V30 H5 -
@dc42 A few extra details:
It seems to stall in spreadcycle even at 130mm/s
In this mode it doesn't stall directly; I can hear it buildup over long movesIn stealthchop seizes at 73mm/s diagonal move, so about 100mm/s belt speed
-
@fractalengineer said in Duet 3 StealthChop 2 Tuning for Nema23:
It seems to stall in spreadcycle even at 130mm/s
The prediction of the EMF calculator is that the 30V supply you have specified, the torque will start to drop off at between 155 and 207 mm/sec speed. I can't remember what setting the kinematics to CoreXY in the calculator changes; but if you set it to Cartesian then it will be belt speed.
If it's stalling in spreadCycle mode, that implies that the motors are not providing enough torque. Assuming that you don't have significant friction in the system, this implies that you need to increase torque (e.g. by increasing motor current - but that will also reduce the speed at which torque starts to drop), or reduce the moving mass, or reduce acceleration.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thank you.
Okay well the EMF calc is giving yet a faster slipping speed in cartesian:

And the steppers are running free right now; zero friction as the belts are off
-
Looks like setting the kinematics to CoreXY makes it use the worst case, i.e. a diagonal move where one motor is driving both axes.
What acceleration are you using? Do you have a specification of rotor inertia for the motor?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Yep I lowered the accel already down to 1000mm/s2; doesn't help
Increasing current doesn't either, tried up to 2.2amps out of rated 2.8; just more noisy.
Rotor inertia is specified to 305 g.cm2

-
Please see this post https://forum.duet3d.com/post/172593 and let me know if it helps.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Ok thanks for the detailed instructions
I changed my config to
M569 P0 V50 H50 M915 P0 S3 F1 H153 T50 R0(and repeat for P1 ofc)
Which gives me the console returns:
8/13/2020, 11:12:24 PM M569 P0 Drive 0 runs forwards, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 936, tpwmthrs 50 (93.8 mm/sec), thigh 50 (93.8 mm/sec) 8/13/2020, 11:12:04 PM M915 P0 Driver 0.0: stall threshold 3, filter on, steps/sec 153 (15.3 mm/sec), coolstep 0, action: noneResults are bad; the seizure happen at yet lower speed now; 60mm/s on diagonals
I tried increasing current up to 2.8amps; scary, no effect
-
@fractalengineer said in Duet 3 StealthChop 2 Tuning for Nema23:
@dc42 Ok thanks for the detailed instructions
I changed my config to
M569 P0 V50 H50 M915 P0 S3 F1 H153 T50 R0(and repeat for P1 ofc)
Which gives me the console returns:
8/13/2020, 11:12:24 PM M569 P0 Drive 0 runs forwards, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 936, tpwmthrs 50 (93.8 mm/sec), thigh 50 (93.8 mm/sec) 8/13/2020, 11:12:04 PM M915 P0 Driver 0.0: stall threshold 3, filter on, steps/sec 153 (15.3 mm/sec), coolstep 0, action: noneResults are bad; the seizure happen at yet lower speed now; 60mm/s on diagonals
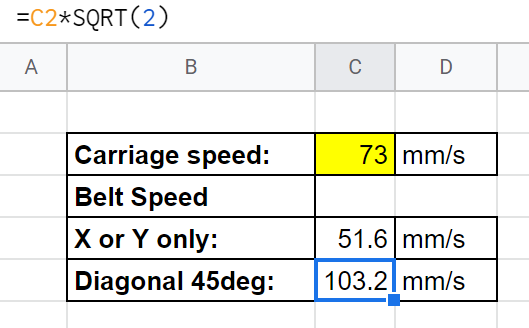
On a diagonal, the belt speed has to move the sum of the X and Y amounts, which is sqrt(2) times the diagonal amount. So 60mm/sec diagonal speed corresponds to 85mm/sec belt speed, which is fairly close to the 93.8mm/sec value returned by M569.
Try reducing all 3 values to 25.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 oh man this test is so painful to the ear but
Diagonal seizes from 73mm/s again
All axis from 100mm/s -
I will try the same settings. What is your steps/mm ?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 appreciate it; 160steps/mm
In fact here's my last workingish config.g
; General Setup - RailCore RRF on a SBC for Duet3 G21 ; Work in millimetres G90 ; Send absolute coordinates... M83 ; ...but relative extruder moves ; Debugging M111 S0 ; Debug (S0 is off; S1 is on) M929 P"eventlog.txt" S1 ; start logging to file eventlog.txt M915 X Y S10 F0 R1 ; log motor stalls (added 5/4/2019) ; Stepper configuration M569 P0 S1 D3 ; Drive 0 X / Rear M569 P1 S0 D3 ; Drive 1 Y / Front M569 P2 S1 D3 ; Drive 2 Z Front Left M569 P3 S1 D3 ; Drive 3 Z Rear Left M569 P4 S1 D3 ; Drive 4 Z Right M569 P5 S0 D3 ; Drive 5 Extruder ; Trinamic Drive Tuning ; Tune tpwmthrs (V) so stealthchop runs at appropriate speeds ; and tune thigh (H) to avoid shifting into fullstep mode M569 P0 V30 H23 ; X - Set tpwmthrs so StealthChop runs up to 70mm/sec (try V47) M569 P1 V30 H23 ; Y - Set tpwmthrs so StealthChop runs up to 70mm/sec M569 P2 V15 H5 ; Z Right - Set tpwmthrs so StealthChop runs up to 15.6mm/sec M569 P3 V15 H5 ; Z Left Rear - Set tpwmthrs so StealthChop runs up to 15.6mm/sec M569 P4 V15 H5 ; Z Left Front - Set tpwmthrs so StealthChop runs up to 15.6mm/sec M569 P5 V125 H5 ; E - Set tpwmthrs so StealthChop runs up to 7.2mm/sec ; Stealthchop parameters M915 P0 S3 F1 H153 T1 R0 M915 P1 S3 F1 H153 T1 R0 ; Axis configuration M669 K1 ; Corexy mode M584 X0 Y1 Z2:3:4 E5 ; Map X to drive 0 Y to drive 1, Z to drives 2, 3, 4, and E to drive 5 ; Leadscrew locations M671 X-10:-10:333 Y22.5:277.5:150 S7.5 ; Steppers Settings M350 X16 Y16 Z16 I1 ; Set 16x microstepping for axes with interpolation M350 Z16 I1 M350 E16 I0 ; Set 8x microstepping for Flex3Drive extruder interpolation OFF M906 X1820 Y1820 Z1008 E420 I35 ; Set motor currents (mA) and motor idle factor (%) // X/Y 65% of rated 2800mA M84 S30 ; Idle timeout 30s M201 X1600 Y1600 Z100 E120 ; Accelerations (mm/s^2) (Was 2500) M203 X24000 Y24000 Z900 E2400 ; Maximum speeds (mm/min) M566 X800 Y800 Z100 E6 ; Maximum jerk speeds mm/minute M208 X290 Y303 Z325 ; Set axis maxima and high homing switch positions (adjust to suit your machine) M208 X-27 Y0 Z0 S1 ; Set axis minima and low homing switch positions (adjust to make X=0 and Y=0 the edges of the bed) M92 X160 Y160 Z1600 E4130 ; Steps/mm ; End Stops M574 X1 S1 P"io0.in" ; Map the X endstop to io1.in M574 Y1 S1 P"io3.in" ; May the Y endstop to io2.in ; Define Bed M140 H0 M557 X5:290 Y30:300 P8:8 ; Probe from X=5 to 290, Y=30 to 300mm with 8x8 points ; Thermistors M308 S0 P"temp0" Y"thermistor" A"Keenovo" T100000 B4240 H0 L0 ; Bed thermistor - connected to temp0 M308 S1 P"temp1" Y"thermistor" A"Mosquito" T4606017 B5848 C5.548428e-8 H0 L0 ; Dyze 500c thermistor - connected to e0_heat ; Define Heaters M950 H0 C"out0" T0 ; Bed heater is on out0 M950 H1 C"out1" T1 ; Hotend heater is on out1 ; Heater model parameters M307 H0 A158.5 C366.7 D2.1 S1.0 V24.0 B0 ; Keenovo duet 3 configuration M307 H1 A324.0 C114.3 D4.4 S1.0 V23.9 B0 ; Heating process parameters for 24V a system ; Heater Fault Parameters M570 H1 P10 T15 S180 ; Hotend allows 10sec for anomaly, permits 15deg excursion, abandons print after 180s M143 S350 ; Set max hotend temperature ; Fans M950 F0 C"out5" ; Hotend fan on "out5" connector M106 P0 S1.0 H1 T75 ; Enable thermostatic mode for hotend fan (S225) M950 F1 C"out4" ; Layer fan on "out4" connector M106 P1 S0 ; Layer Fan ; Tool definitions M563 P0 D0 H1 F1 ; Define tool 0 G10 P0 S0 R0 ; Set tool 0 operating and standby temperatures ; BLTouch M558 P9 C"io7.in" H5 R1 F120 T6000 A5 S0.02 B1 ; Define the bltouch input on io7.in M950 S0 C"io7.out" ; Define the bltouch servo on io7.out G31 X Y25 Z1.95 P25 ; Set the offsets for the bltouch ; Duet3 Cooling M308 S2 Y"drivers" A"DRIVERS" ; Configure sensor 2 as temperature warning and overheat flags on the TMC2660 on Duet M308 S3 Y"mcu-temp" A"MCU" ; Configure sensor 3 as thermistor on pin e1temp for left stepper M950 F2 C"out6" Q100 ; Create fan 2 on pin fan2 and set its frequency M106 P2 C"ElectroBox" H1 L0.0 X1.0 B0.3 T70:160 ; Set fan 2 value ; Filament Sensor M591 D0 P7 C"io6.in" S0 E50 L1.25 R25:175 A1 T0 ; Select first hot end ; Mesh Bed Compensation G29 S1 ; Load height map from SD card M376 H3 ; Set taper height 3mm ; Dynamic Acceleration Adjustment M593 F52 ; Logging M929 P"eventlog.txt" S1 ; start logging to file eventlog.txtThanks David
-
@dc42 Ok a few more observations from today's experiments:
-
The motors don't seem to like hanging around the V setting speed; movements gets either in StealthC with hiccups, or in SpreadC with hiccups, or just stalls/seizes altogether.
-
Changing the V value doesn't fix this weird zone; it just moves it around
-
Turning M569 do D2 makes it smoother at those speeds; no more hiccup, just regular screamy Spreadcycle
-
Even then, In SpreadCycle mode they still stall at relatively low speed; 160mm/s even on X/Y moves
-
These stalls don't happen right upon movement start; it builds up over the length of the -long- move. That means, the speed of 160mm/s doesn't change over the duration of the movement, but it tracks well in the beginning, then stalls at the end
Hope that helps
-
-
Thanks for the extra info.
@fractalengineer said in Duet 3 StealthChop 2 Tuning for Nema23:
Even then, In SpreadCycle mode they still stall at relatively low speed; 160mm/s even on X/Y moves
These stalls don't happen right upon movement start; it builds up over the length of the -long- move. That means, the speed of 160mm/s doesn't change over the duration of the movement, but it tracks well in the beginning, then stalls at the end
Barring the TMC5160 drivers doing odd things, or air resistance increasing substantially at the end of the move, that suggests that the motors are not powerful to overcome frictional forces.
- Are you sure that the mechanism isn't tending to bind at high speeds?
- Does the same happen with both pure X and pure Y moves?
- What are the maximum speeds before reduction in torque predicted by the motor EMF calculator now?
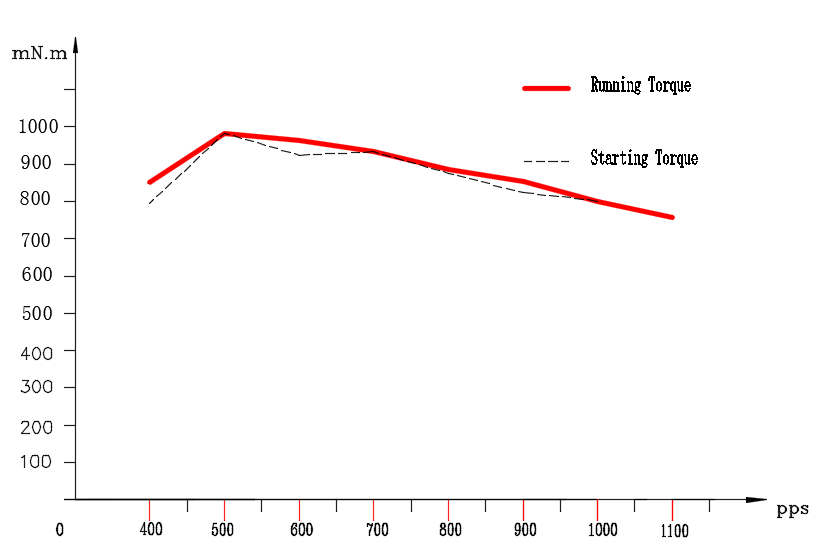
- Does the torque/speed curve for the motors (if available) show anything odd at those speeds?
- Please confirm that in spreadCycle mode you have thigh set high enough so that coolStep won't be operating at those speeds.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
-
Well again the steppers are running free; nothing connected to them
-
And yes all the observations were made with a manual gcode that goes from origin to top left corner to front right and back to origin
-
Maximum speed according to EMF Calc should be at least 220mm/s
@fractalengineer said in Duet 3 StealthChop 2 Tuning for Nema23:
@dc42 Thank you.
Okay well the EMF calc is giving yet a faster slipping speed in cartesian:
And the steppers are running free right now; zero friction as the belts are off
-
Thigh is set to 5 usually which makes 999mm/s
-
I'll see if I can get the curve
Railcore II ZL
-
-
@dc42 that one is for the previous 8.5mH steppers that had the same issues but at sightly higher speed
-
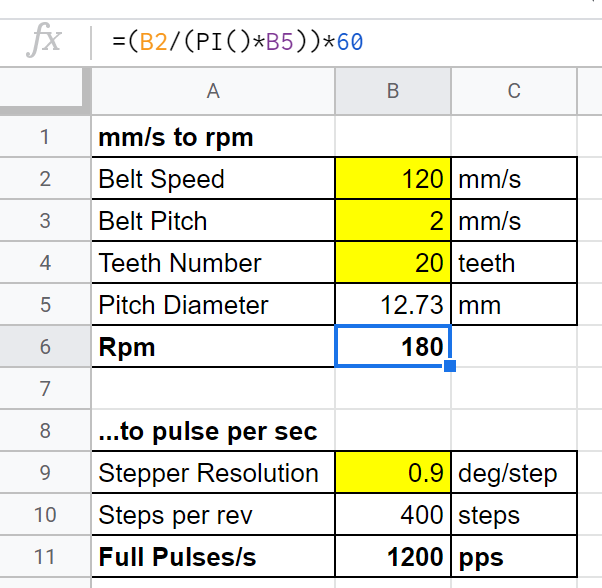
I made this little sheet; according to my calculation 120mm/s makes RPM and 1200pps
That should still be well within the envelope of this stepper?
Even twice that much pobably
-
@fractalengineer said in Duet 3 StealthChop 2 Tuning for Nema23:
Well again the steppers are running free; nothing connected to them
Have you tried connecting them to a load to see how they behave?