Robotic kinematics
-
ok! I try to contact you in a few days!
-
@tony73 I have a prototype now, not ideal, but working to validate the firmware. (The M114 was not wrong)
-
@JoergS5
did you make a prototype with 5 actuators plus an extruder for 3d printing? -
@tony73 5 actuators yes, extruder not yet*). I have a weakness in specifications: when arm 5 rotates to the left (180 degree eg), arm 3 can be in the way for the hotend+extruder if arm 3 is "flat".
*) my robot has a very low payload. I still have to learn a lot about how to optimize gear ratios, counterweight and belt tension, to get a good solution. This is quite different from developing the firmware!
-
I have some images of my first pre-Prototype, before I will reconstruct it:



-
The first idea was to place Axis 1 behind the construction. This seemed to be a good idea because the axis is fixed at two points top and down and can be calibrated easily. But the disadvantages are, I have no good place to install actuator 2 and the counterweights have not much room also.
Arm 2 and 3 are 27 cm and 20 cm long. For production the same length will be better, but I differed them to test firmware.
The gears are insufficient. One stepper has a 1:27 gear, but the problem is the little 60 teeth pulley which is not sufficient. I'll produce 200 teeth pulleys as a next test now. The belt tensioning is very important also, because otherwise the belts slip very often.
Arms 2 and 3 have 4 arm elements 20x10x2, connected horizontally by 100x20x2. The placement of the connectors are important, they define the possible axis angles.
The upper and lower arm construction is 18 cm distance and makes sure the arm 4 is vertical at all times, so axis 5 is vertical also. I will remain this construction, but axis 5 supported at two hinges and with a gear.
The actuator 4 on the third image is a dummy to check the firmware code for R0.
I will try to avoid counterweights, because they support wavering of the construction.
The hinges are constructed by 8 mm aluminium or steel shafts, F688 ball bearings with 16 mm holes and the 8 mm holes for the arms which are fixed to the shafts. Distances will be implemented by 8x12x0.5 washers.
The arm connected pulleys are connected with screws to the arms, so they cannot slip when only connected to the shafts.
One thing to be aware is, if turning off or installing new firmware, the steppers loose current and the robot arms fall down...
The rebuild to the prototype will have axis 1 below the robot on a plate, bigger pulleys and a better belt tensioning system.
-
Hello ! I'm sorry but yesterday I couldn't write to you, I saw the photos, to understand better, are you using this robot with some modifications, or do you have another one? however you have already worked so hard to do this!
-
@tony73 I constantly change this one. I am currently redesigning axis 1 and 2 and making the axis pulleys bigger. Then I will be able to install the extruder and print.
The most work are the constant iterations, especially assembling and disassembling. I wished I have a robot who assembles it for me.... I could spare some effort with a good design program, but to understand some of the principles, I have to experiment.
Currently important aspects to build the robot are:
- hinges and arms without play and wobble
- maximizing possible angles
- find optimal gear ratio and avoid belt slippage
- balancing the arms, avoiding counterweights by replacing the steppers (the steppers function as counterweights)
- a procedure to protect against power off and arms falling down
-
from the photos it seems to me that you have steppers with planetary gear motor 1:27 primary pulley how many teeth? secondary 60 teeth, the steppers are cut to what, full pitch, 1/2, 1/4, 1/8, 1/16, 1/32, etc .... the gearmotor how much size at birth? I would like to understand how much reduction is needed! since you would like to put 200 tooth pulleys instead of 60 tooth ones.
-
@tony73 the gears were only for testing (and at axis 2 I had space problems), I want to avoid them because they have backlash. I will use a two or three step belt gear or a self constructed harmonic drive (axis 5). A 20/60 and 20:200 will result in 1:30.
-
@JoergS5
60 ÷ 20 × 200 ÷ 20 = 30 reduction 1: 30 right? do you want to eliminate cycloidal motor reducers, are they the ones that have play? have you already solved the problems of movement on x coordinates? -
@tony73 yes this is my calculation, I hope 1:10 at the last stage is enough, I will have to test it*). I had to stop firmware test, but the X values of M114 were ok, they were the world coordinates (mixing: xyz = world coordinates and UV = angles). There may be the bug: comparing X world coordinates with M208 angle of X.
*) I calculated the Nm of the stepper, this was enough torque for a 60 tooth. But the belt slipped and I had to use a lot of tension to avoid it. It has an effect on wobble also, depending on acceleration/speed, weight and gear ratios.
I am currently working on Axis 1 and will publish images when finished. I like cross roller bearings, but they are very expensive at the 300 mm size (hundreds of bucks), so I am building a DIY-able substitute.
-
@JoergS5
can you tell me in the config.g in M350 which microstepping you put? -
@tony73 I use 16 I1 in most cases, because for Duet 2 it was the only mode to support 256 microsteps by the controller. Duet 3 supports more modes for I1, but I stayed with 16.
You have to correct M92 accordingly: as example, a 200 step stepper, 16 microsteps and gear ratio 1:30:
200*16 steps/360 degree * 30 = 266.66667
In documentation it's called steps/mm, but in case of robots it is steps/degree. -
@JoergS5
M92 200 * 16/360 * 30 the result and 266,6666666667 this would be steps / mm! and how would the result be for robots? same ? but with the difference that they are steps / degree, and not steps / mm? or does the result change? -
@tony73 the M92 means steps/degree in case of robot kinematics. There is no mm movement of the actuators, because they rotate
(with the exception of the rail, which is in mm) .This is also true in the firmware, where the parameters stepsPerMm in functions CartesianToMotorSteps and MotorStepsToCartesian are correctly stepsPerDegree.
-
@JoergS5
Hello! I have never understood the difference between interpolated and non-interpolated stepper motors! I don't understand the concept well, could you explain me with simple words, or if you have a link where they explain the function? -
@tony73 I don't have a general link, but to explain for what microstepping is good, this https://hackaday.com/2016/08/29/how-accurate-is-microstepping-really/ is a good article. Microstepping is for smooth and quiet movement of the steppers, not for precision.
Interpolation means, like in mathematics, dedicating the position from known positions. The known positions are the full and half steps, the microsteps are the interpolated positions.
Separate explanation of interpolation: a stepper has a number of magnets and coils, those produce the full steps (not 1:1, but the result are 200 full steps), and through current manipulation, the steps between can be set, called interpolation. But both are not exact locations, steps have 5% position error and microsteps even more.
And when you power on, the stepper can have +- 2 steps difference from the position when you powered off. One of the reasons why one needs homing and not simply storing the last position when powering off.
To understand 16 I1, it is important to know that the firmware sends 16 microsteps, and the trinamic driver interpolates to 256 steps inside the driver. If you set 256 I0 e.g. the firmware has to generate all 256 steps, which is too much in most cases, resulting in lost steps and movement errors (M122 reports hiccups then).
-
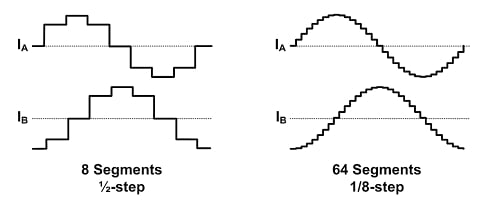
Interpolation gives you a smoother wave-form, but you don't need to generate the extra steps (you'll have to imagine a 1/256th wave that is really smooth!)
Its mostly a benefit for noise, although for some applications you might actually be able to see that the motion is more smooth.
-
I reintroduced the A parameter to define min and max angles for the 5 axis and don't use M208 in the future. The reason is, M208 is based on the assumption that world coordinates are used and the area is rectangle. At robots this is not true, the allowed area differs with the Z value (looks a bit like a donut), so the limits are better and exact controlled by the angles instead.
Using M208 to define angles like I did may conflict with existing firmware code where M208 is used, so I better use the separate parameter A to define the angles. This is also more similar to the other scara kinematics.I introduced a new parameter D to define the outline of the arms and axis, based on a research article how to avoid collisions when two robots are working in the same working area. To allow easier calculation, the arms are outlined by a cylinder and the actuator by a sphere. This will also allow to control that arm 5's extruder is not in the way of arm 3 if arm 3 is near horizontal position.
The necessary firmware changes for A and M208 will be done next weekend, D will take a while. I've implemented it and check it in and it compiles, but it is not tested yet.