external drivers not working
-
hello,
I am currently building a clay printer with 2 external drivers.
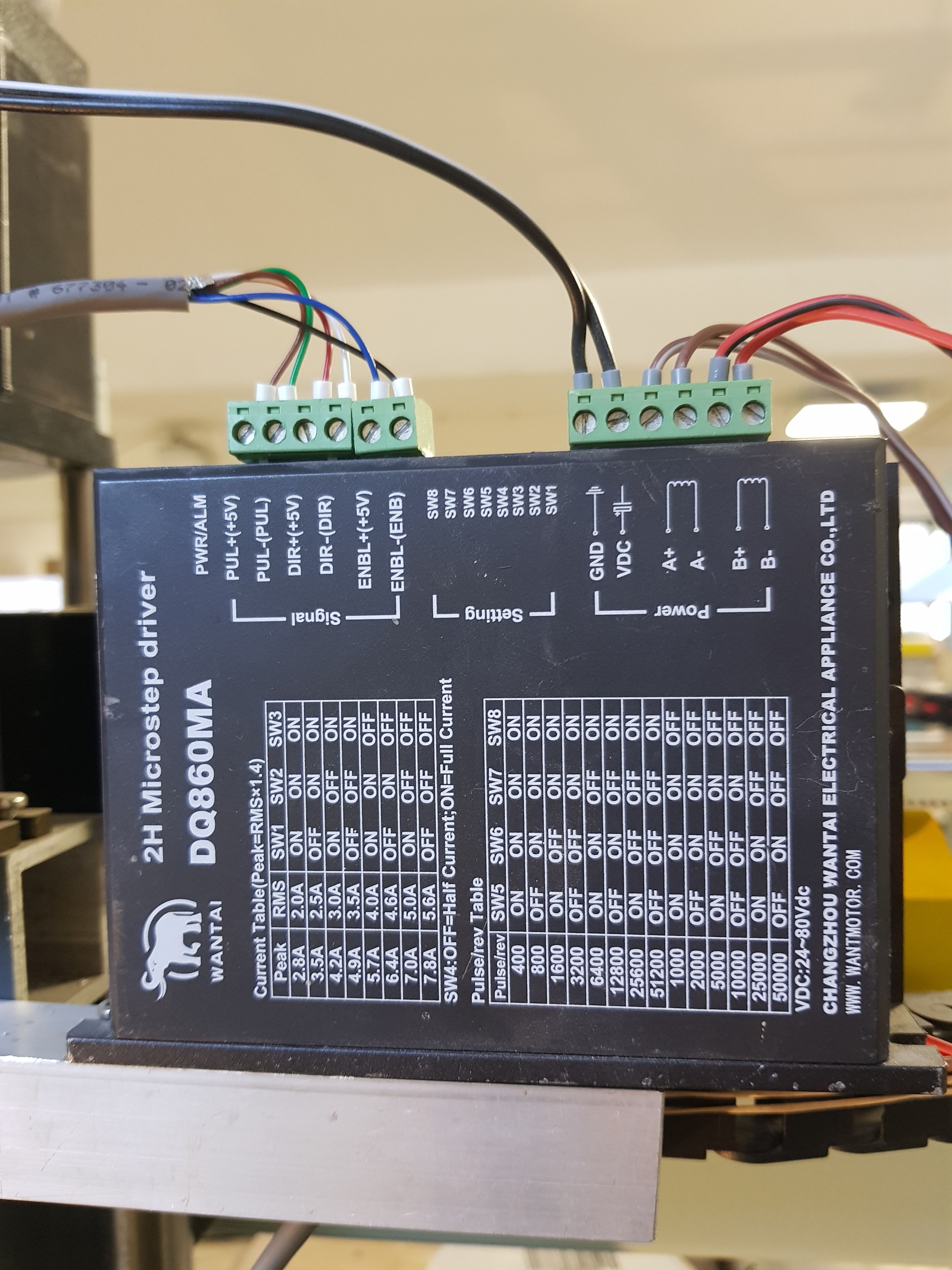
The drivers are the dq890ma, I have assigned the outputs and I tried some settings in the config. I am using the breakout board for the two drivers.
when I power the duet the motor is idle and there is no resistance when turning. when I try to move that motor it only clicks once and it has restistance when turning with my hands.my config:
; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S0 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S0 ; physical drive 3 goes forwards
M569 P4 S0
M569 P5 R1 T4:4:4:0
M569 P6 S1
M584 X3:4 Y0:1 Z5 E6 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X79.74 Y79.74 Z627.45 E480.00 ; set steps per mm
M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X500.00 Y500.00 Z20.00 E3000.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z100.00 E200.00 ; set accelerations (mm/s^2)
M906 X2400 Y2400 Z2400 E2400 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeoutI hope someone can help me.
thanks
-
you need to add a timing value to the M569.
I use the similar drivers (DM860H) on my CNC and have the following for each driver.M569 P0 S0 T2.5:2.5:10:5 -
I tried that, but it makes no difference.
-
What board do you have and where/how do you have them connected?
-
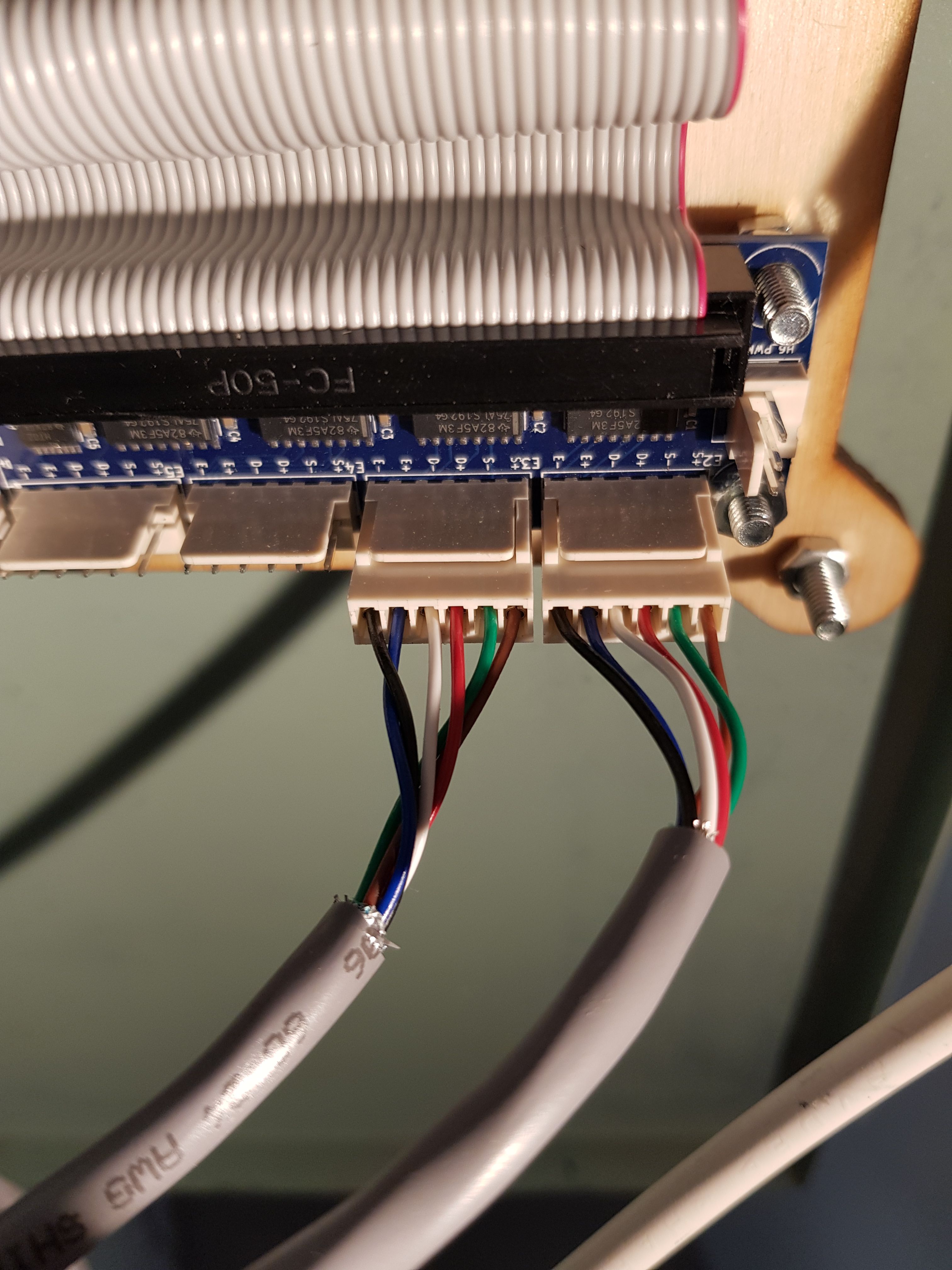
I have the duet board v1.04. With the breakoutboard.
I conected all the 6 ports, S+ S- D+ D- E+ E-. -
your driver mapping is incorrect then.
Please see here https://duet3d.dozuki.com/Wiki/Duet_Expansion_Breakout_Board -
no I dont think so, my z motor is connected to E2 that is port 5.
I assigned my Z to 5.
M569 P5 R1 T2.5:2.5:10:5
and this is the line for the Z motor. -
is the R value correct?
Rnnn Driver enable polarity: 0 = active low, 1 = active high, -1 = driver is always disabled and is not monitored (default 0)Which side of the driver do you have the signal from the board wired to?
I have mine wired to the positive side of direction, pulse and enable, with R set to 0.Are you also using M564 H0 or setting G92 Z0 to allow the motor to be moved without homing?
-
I tried R1 and R0, it makes no differense.
If I am correct you conected S+ from the break out board to S- on the driver? the same as D and E?yes I have also the M564 H0 in my config
-
I don't use a breakout board (as I'm running an SKR Pro) but you would typically connect Step+ to Pul+, Dir + to Dir+ and Enable+ to ENA+. The same goes for the negative outputs.
-
oke, how do you have your dip switches on the drivers?
and do you have your driver connected to the 5v pin or 3.3v pin?
I am thinking of skipping the break out board for testing. -
Mine just has dip switches for steps per revolution and driver current.
And I run mine off 3.3v. They seem to run fine from that but your experience may vary.There is a note about this on the breakout board page.
The Duet Expansion Breakout Board uses a differential output signal of -3.6V to +3.6V. The differential outputs help the LEDs in the optocouplers in most drivers turn off faster. Also they are compatible with drivers that accept RS485 signal levels instead of 5V. Most external drivers are quite happy with the 3.6V differential signals. However, for those few drivers that really do need 5V, you can achieve this by connecting STEP+ from your driver to +5V, which is available on the H6_PWM and/or H7_PWM pin headers (see wiring diagram above), and STEP- for your driver to STEP- on the expansion board. Similarly for DIR and ENA. -
I tried that also, it makes no difference.
currently I am completely stuck... -
can you post a photo of your wiring?
-