Lower case axises visible but not working 3.4RC2
-
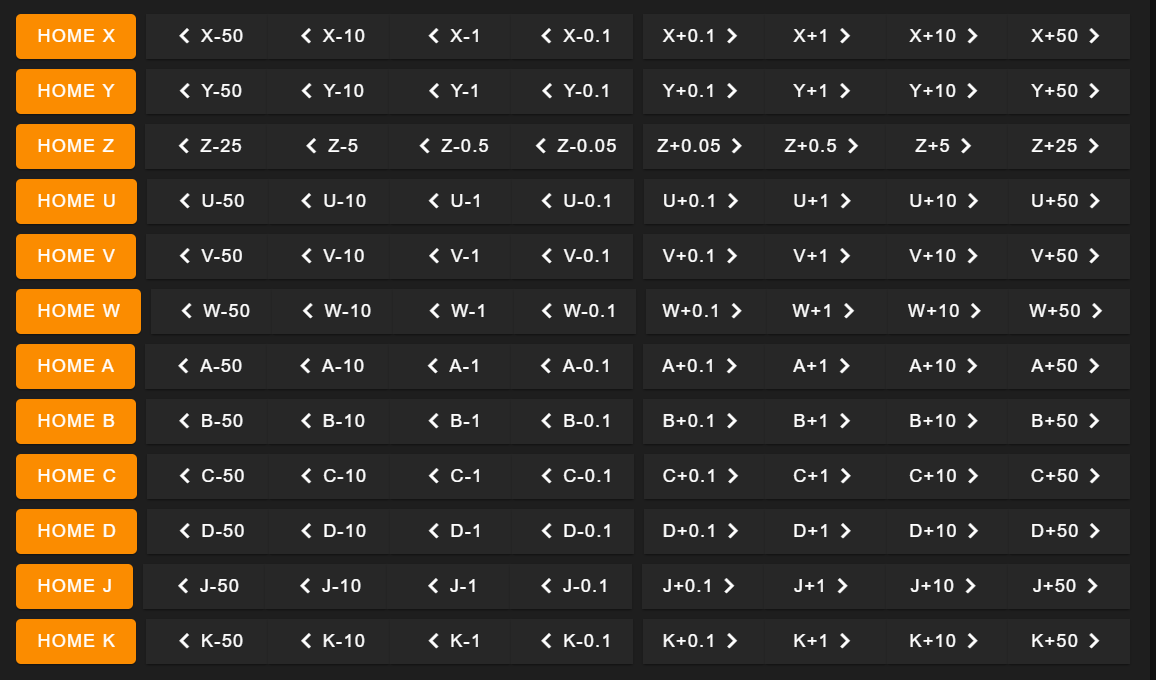
I have defined 12 axises including a J and K axis. All 12 are visible in Duet Web Control and the first 10 work. Only the J and the K axises are not moving when I trigger them through the dashboard. These specific motors do work if I switch the axis names to one of the first 10 though.
Below is my config.g:
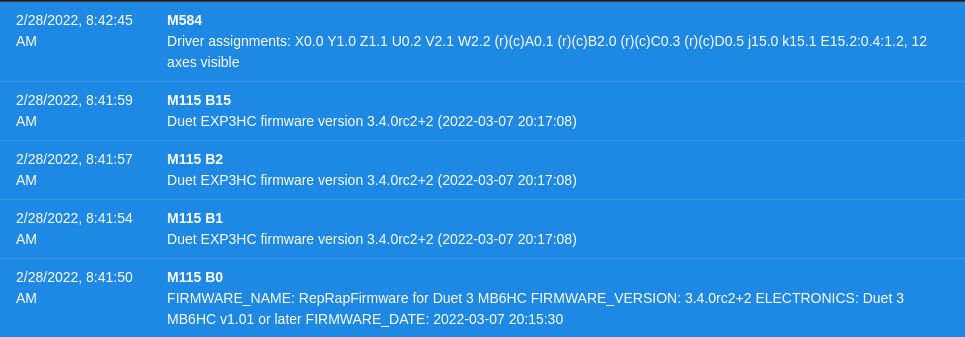
; Configuration file for Duet 3 (firmware version 3) ; executed by the firmware on start-up ; ; ; generated by Xavier Tarr ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves.. M550 P"Duet 3" ; set printer name ; Drives M569 P0.0 S0 ; physical drive 0.0 goes forwards M569 P0.1 S0 ; physical drive 0.1 goes forwards M569 P0.2 S0 ; physical drive 0.2 goes forwards M569 P0.3 S1 ; physical drive 0.3 goes forwards M569 P0.4 S1 ; physical drive 0.4 goes forwards M569 P0.5 S0 ; physical drive 0.5 goes forwards M569 P1.0 S0 ; physical drive 1.0 goes forwards M569 P1.1 S1 ; physical drive 1.1 goes forwards M569 P1.2 S0 ; physical drive 1.2 goes forwards M569 P2.0 S1 M569 P2.1 S0 M569 P2.2 S1 M569 P15.0 S1 M569 P15.1 S1 M569 P15.2 S0 M584 X0.0 Y1.0 Z1.1 U0.2 V2.1 W2.2 A0.1 B2.0 C0.3 D0.5 'J15.0 'K15.1 E15.2:0.4:1.2 ; set drive mapping M350 X16 Y16 Z16 U16 V16 W16 A16 B16 C16 D16 'J16 'K16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z80.00 U80.00 V80.00 W80.00 A80.00 B80.00 C80.00 D80.00 'J80.00 'K80.00 E93.00 ; set steps per mm M203 X6000.00 Y6000.00 Z6000.00 U6000.00 V6000.00 W6000.00 A6000.00 B6000.00 C6000.00 D6000.00 'J6000.00 'K6000.00 E1000.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z500.00 U500.00 V500.00 W500.00 A500.00 B500.00 C500.00 D500.00 'J500.00 'K500.00 E5000.00 ; set accelerations (mm/s^2) M906 X1200 Y600 Z800 U1200 V600 W800 A1200 B600 C800 D1200 'J600 'K800 E1000 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 U0 V0 W0 A0 B0 C0 D0 'J0 'K0 S1 ; ; set axis minima M208 X250 Y350 Z200 U250 V350 W200 A250 B350 C200 D250 'J350 'K200 S0 ; set axis maxima ; Endstops ;A P"io2.in" P"15.io0.in" ;B P"io3.in" P"15.io2.in" ;C P"io4.in" P"15.io1.in" M574 X1 S1 P"io1.in" ; X max active high endstop switch M574 Y1 S1 P"1.io0.in" ; Y min active high endstop switch M574 Z1 S1 P"1.io1.in" ; Z min active high endstop switch M574 U1 S1 P"2.io0.in" ; U min active high endstop switch M574 V1 S1 P"2.io1.in" ; V min active high endstop switch M574 W1 S1 P"2.io2.in" ; W max active high endstop switch M574 A1 S1 P"io2.in" ; D and A max active high endstop switch M574 B1 S1 P"io3.in" ; B and Ax_12 max active high endstop switch M574 C1 S1 P"15.io1.in" ; C and Ax_11 min active high endstop switch M574 D1 S1 P"15.io0.in" M574 'J1 S1 P"15.io2.in" ; D and A max active high endstop switch M574 'K1 S1 P"15.io1.in" ;PT1000 M308 S0 P"15.temp0" Y"pt1000" ; configure sensor 0 as PT1000 on pin temp0 M950 H0 C"15.out0" T0 ; create bed heater output on out0 and map it to sensor 0 M143 H0 S500 ; set temperature limit for heater 0 to 120C M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M308 S1 P"15.temp1" Y"thermistor" T100000 B4138 ; configure sensor 1;;; as thermistor on pin temp0 M950 H1 C"15.out1" Q10 T1 ; create nozzle heater output on out0 and map it to sensor 1 M143 H1 S500 ; set temperature limit for heater 1 to 400C M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M308 S2 P"1.temp1" Y"pt1000" ; configure sensor 0 as PT1000 on pin temp0 M950 H2 C"out1" T2 ; create bed heater output on out0 and map it to sensor 0 M143 H2 S500 ; set temperature limit for heater 0 to 120C M307 H2 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M308 S3 P"temp0" Y"pt1000" ; configure sensor 0 as PT1000 on pin temp0 M950 H3 C"out2" T3 ; create bed heater output on out0 and map it to sensor 0 M143 H3 S500 ; set temperature limit for heater 0 to 120C M307 H3 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit ; Fans M950 F0 C"15.out6" Q500 ; create fan 1 on pin out4 and set its frequency M106 P0 S255 H0 T45 ; set fan 1 value. Thermostatic control is turned on M950 F1 C"15.out7" Q500 ; create fan 1 on pin out4 and set its frequency M106 P1 S255 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"out8" Q500 ; create fan 1 on pin out4 and set its frequency M106 P2 S200 H2 T45 ; set fan 1 value. Thermostatic control is turned on M950 F3 C"out7" Q500 ; create fan 1 on pin out4 and set its frequency M106 P3 S200 H3 T45 ; set fan 1 value. Thermostatic control is turned on M950 F4 C"15.out8" Q500 ; create fan 0 on pin out7 on the breakout board and set its frequency M106 P4 S0.0 H-1 ; set fan 0 value. Thermostatic control is turned off ; Tools M563 P0 H0 D1 ; define tool 0 G10 P0 A0 B0 C0 D0 'J0 'K0 ; set tool 0 axis offsets G10 P0 R215 S215 M563 P1 H1 D0 ; define tool 0 G10 P1 U0 V0 W0 ; set tool 0 axis offsets G10 P1 R215 S215 ; set initial tool 0 active and standby temperatures to 0C M563 P2 H2 D2 ; define tool 0 G10 P2 X0 Y0 Z0 ; set tool 0 axis offsets G10 P2 R215 S215 ; set initial tool 0 active and standby temperatures to 0C M563 P3 H3 D1 ; define tool 0 ; set tool 0 axis offsets G10 P3 R215 S215 ; set initial tool 0 active and standby temperatures to 0C M563 P4 H0:1:2:3 D0:1:2 G10 P4 R215:215:215:215 S215:215:215:215 M563 P5 H1:2 D0:2 G10 P5 R215:215 S215:215 M564 H0 ; allow axis movement before homing.
-
@xtarr lowercase axis letters don't work in DWC 3.4.0rc2. We have an updated version that fixes this.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thanks! What is the best way to get that?
-
@xtarr I put up DWC test builds for SBC and standalone mode on https://pkg.duet3d.com/testing
-
@xtarr you should also use RRF 3.4.0rc2+2 available at https://www.dropbox.com/sh/amtiizdcylnuaye/AAA4hzXFvU0RMOSDtdT37HFua?dl=0.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I am running into the same issue even though I am running 3.4RC2+2. All of the axises but the j and k work.
-
@xtarr how are you trying to move the j and k axes now? Are you running the updated DWC as well?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I am trying to run it through the Duet Web control dashboard. I updated the firmware but not the DWC. How would I go about that?
-
@dc42 I didn't see the duet web control package in the dropbox link you sent.
-
@xtarr they're here https://pkg.duet3d.com/testing
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@dc42 The motions for the lower case axises do work through gcode command line
-
@jay_s_uk I am running the DWC firmware for 3.4RC2 but I am looking for DWC 3.4RC2+2
-
@xtarr its in the link I gave you
-
@jay_s_uk I am very sorry. You are right. Just added this and everything works now. Thank you!
-
 undefined dc42 marked this topic as a question
undefined dc42 marked this topic as a question
-
undefined dc42 has marked this topic as solved