Having trouble setting up my DIY 3D printer (1meter cubic)
-
Hello guys I am having a hard time setting up my 1meter printer. I have set my limits on the X,Y and Z axis which is 1000mm. But since I am a newbie i need some guidance on how to set up, the axes and extruder (as a extruder I am using Dyze design typhoon) and as slicer I am using PrusaSlicer.
I have attached to this document my Config.g so you can see what I have so far in terms of set up.
If you have any input, would be much appreciated
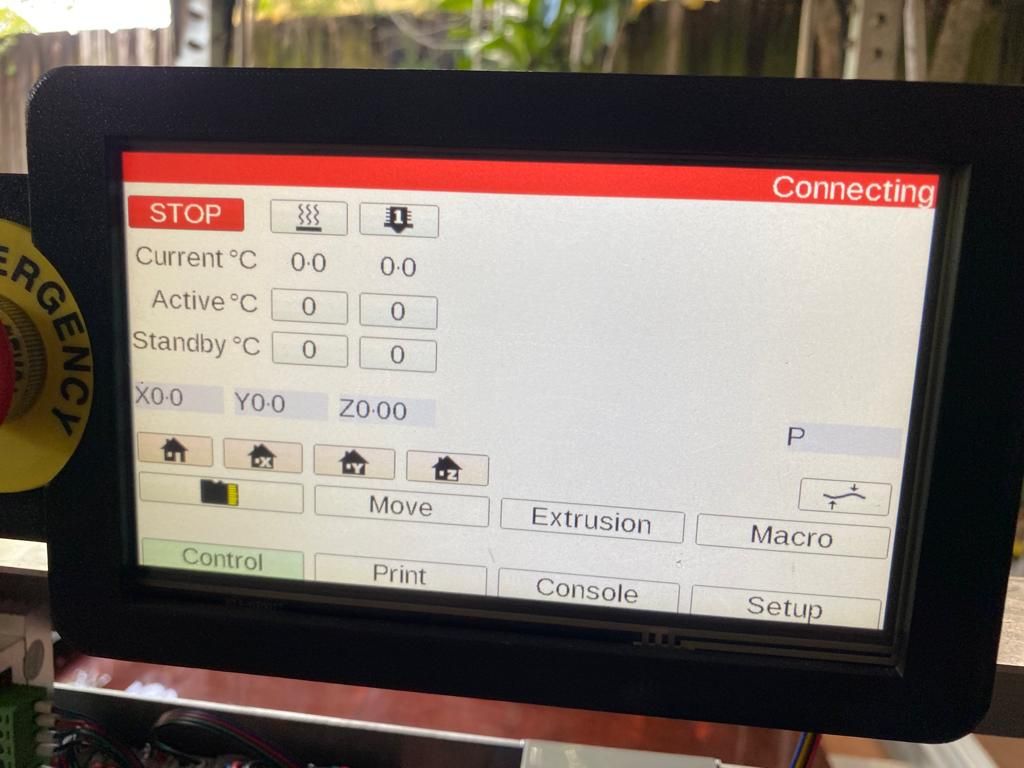
In addition my Duet2 - wifi console keeps saying on the right hand side corner "connecting", what is that suppose to mean?
CODE & IMAGE
; Configuration file for Duet WiFi (firmware version 1.21) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.12 on Mon Sep 05 2022 15:23:57 GMT-0400 (Eastern Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"OYM_PRINTER" ; set printer name M667 S1 ; select CoreXY mode ; Network M551 P"OYMPRINTER2022" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M584 X0 Y1 Z2 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E98.00 ; set steps per mm M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E10000.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout M564 H0 ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X1000 Y1000 Z1000 S0 ; set axis maxima ; Endstops M574 X1 Y1 S1 ; set active high endstops M574 Z1 S2 ; set endstops controlled by probe ; Z-Probe M558 P2 H5 F120 T6000 ; set Z probe type to modulated and the dive height + speeds G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height M557 X15:215 Y15:195 S20 ; define mesh grid ; Heaters M305 P0 T100000 B4138 R4700 ; set thermistor + ADC parameters for heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M305 P1 T100000 B4138 R4700 ; set thermistor + ADC parameters for heater 1 M143 H1 S500 ; set temperature limit for heater 1 to 500C ; Fans M106 P0 S0 I0 F500 H-1 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off M106 P1 S1 I0 F500 H1 T45 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
You need to define the serial connection for the PanelDue using M575
Something like
M575 P1 B57600 S1
However the baud rate must match what is set on the PanelDue itself. -
Your config is using the syntax of very old firmware. You should probably update your firmware to the latest on both the Duet and the PanelDue. You'll also have to generate a fresh config.g.
Can you send M122 in the gcode console of DWC and copy and paste the results here?
If you still have access to DWC. Upload these zip files, one at a time in the system tab. Don't extract them first. Reboot after each. Use M115 in the gcode console to verify the firmware has been applied.
https://github.com/Duet3D/RepRapFirmware/releases/download/2.05.1/Duet2Firmware-2.05.1.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.0/Duet2and3Firmware-3.0.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.3/Duet2and3Firmware-3.3.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.4.3/Duet2and3Firmware-3.4.3.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.4.4/Duet2and3Firmware-3.4.4.zipThat will get your firmware and DWC up to date.
You can see the change logs here:
https://github.com/Duet3D/RepRapFirmware/wiki/Changelog-RRF-3.xFor your config, might be a good idea to run through the configurator tool and generate a fresh set for RRF3.
https://configtool.reprapfirmware.org/StartBackup your existing config files in the sys folder in case you want to switch back to RRF2. It’s easy to switch back and forth, just upload the zip file for the version you want and then upload your config files.
These documents will come in handy during the conversion.
https://duet3d.dozuki.com/Wiki/RepRapFirmware_3_overview
https://docs.duet3d.com/en/User_manual/RepRapFirmware/Migration_RRF2_to_RRF3
https://docs.duet3d.com/en/User_manual/Reference/Gcodes -
@Phaedrux this is what I got when I typed M122
M122
=== Diagnostics ===<LF>RepRapFirmware for Duet 2 WiFi/Ethernet version 3.1.1 running on Duet WiFi 1.02 or later<LF>Board ID: 0JD0M-9X6JA-JUNSS-6J9DL-3S86M-KTK7U<LF>Used output buffers: 1 of 24 (2 max)<LF>=== RTOS ===<LF>Static ram: 27980<LF>Dynamic ram: 92816 of which 680 recycled<LF>Exception stack ram used: 256<LF>Never used ram: 9340<LF>Tasks: NETWORK(ready,1280) HEAT(blocked,1456) MAIN(running,1912) IDLE(ready,80)<LF>Owned mutexes:<LF>=== Platform ===<LF>Last reset 00:01:44 ago, cause: power up<LF>Last software reset at 2022-11-11 15:58, reason: User, spinning module GCodes, available RAM 9108 bytes (slot 1)<LF>Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f000 BFAR 0xe000ed38 SP 0xffffffff Task MAIN<LF>Error status: 0<LF>MCU temperature: min 29.5, current 32.5, max 33.0<LF>Supply voltage: min 1.0, current 1.6, max 1.8, under voltage events: 0, over voltage events: 0, power good: no<LF>Driver 0: ok, SG min/max not available<LF>Driver 1: ok, SG min/max not available<LF>Driver 2: ok, SG min/max not available<LF>Driver 3: [Warning: Maximal number of characters per line exceeded! Check the line break settings in Terminal > Settings > Text or increase the limit in Terminal > Settings > Advanced.] -
@Phaedrux said in Having trouble setting up my DIY 3D printer (1meter cubic):
for RRF3
is there a YT video where I can follow the process of setting up this kind of printer?
-
@OwenD Thank you, my friend!!
-
Thank you! Now I have updated everything.
On another note: I am also using a expansion board to connect more than one motor.
see image below.
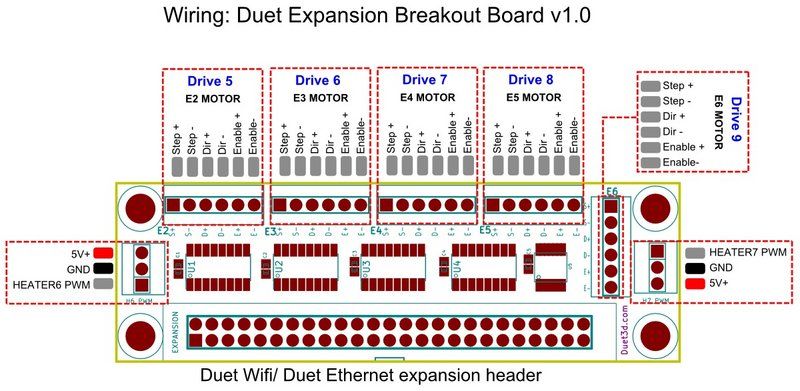
Do you guys have any input on how to config this thru RRF config tool or other method? Because right now is not letting me moving the motors. However when I turn on the whole system all the motors get volt.
-
I don't think you can use the config tool to add external drivers yet. You'd have to map them manually.
It looks like your config is missing any driver definitions at all.
Are you not planning on using the onboard drivers?
-
@Phaedrux What do you mean by onboard driver? Because I do plan to use the drivers.
Could you help me out on how to define the drivers?
-
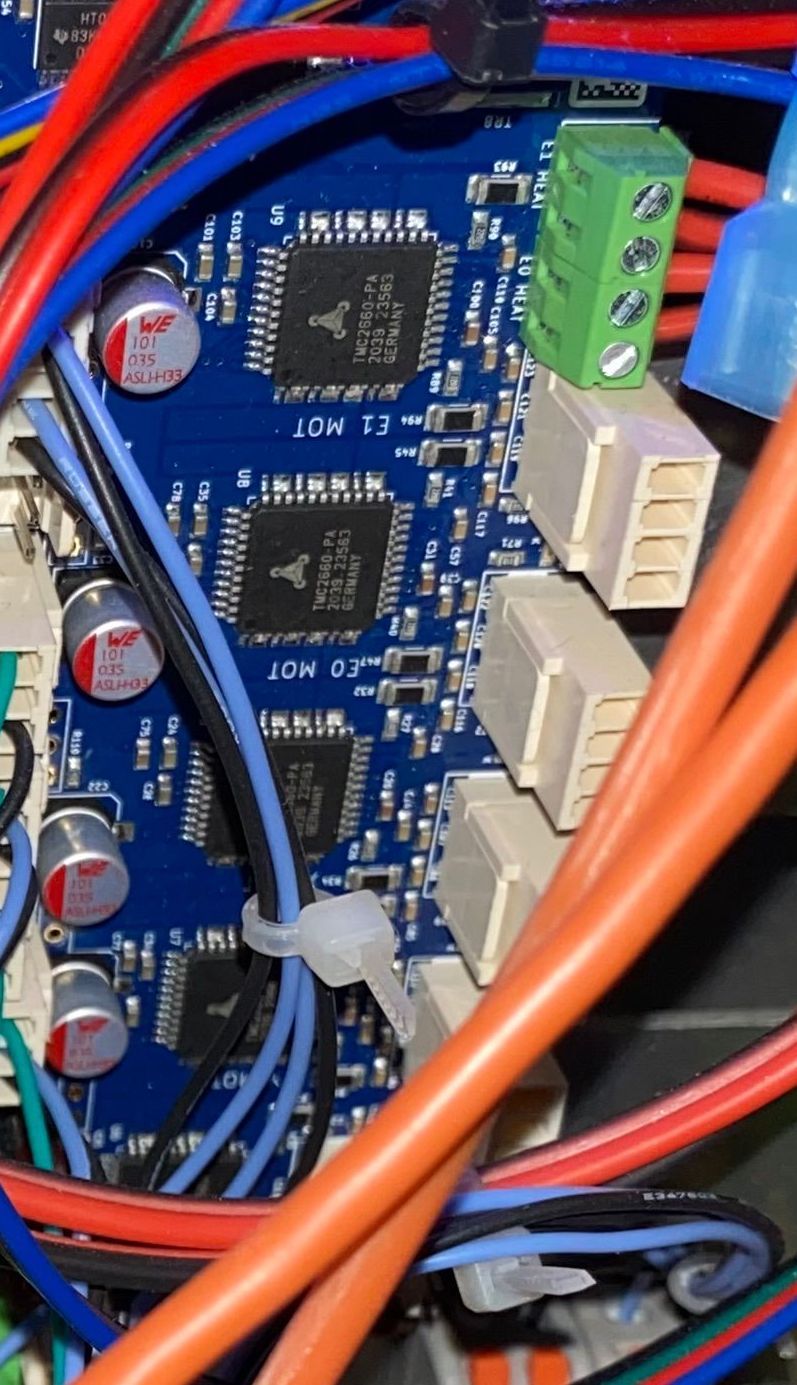 1668387565568-img_4038.jpg
1668387565568-img_4038.jpgThese are the onboard drivers.
You're using the expansion breakout board for the external drivers. Have you seen this? Have you configured them in config.g?
https://docs.duet3d.com/en/Duet3D_hardware/Duet_2_family/Duet_Expansion_Breakout_Board
-
@Phaedrux Not. until now. I am gonna try with these settings and let you know.