[3.5b4] Homing process issues unwanted 'abort' command
-
Hello,
I've had this issue since a while on various 3.5 betas, but never got around to reporting it (can't remember when it started, sorry
 )
)
My RRF automatically issues an abort command in my homing sequence IF the homing is part of a print job. It works fine when I manually trigger it.
So my first hunch would be something again about macro hierachy depth or something, but replicating the same depth without making it a print job still works fine...
Here's the executed gcode, this is a minimalized print job that is executed as such and triggers the behavior every single time for me.print-file gcode:
M98 P"/macros/Misc/PrePrintCalibrate"PrePrintCalibrate:
echo "Pre-Print Calibration" echo "Checking Homing Status" M98 P"homeall.g" echo "Ensuring no active tool" T-1 echo "Starting Bed Mesh Process" echo "Setting bed mesh to default values" M557 X{global.minXMesh, global.maxXMesh} Y{global.minYMesh, global.maxYMesh} S{global.meshPointSpacing} ; define default mesh grid echo "Starting bed.g macro..." G32homeall.g:
echo "Executing homeall.g" M98 P"homew.g" ; Home Wiper height M98 P"homed.g" ; Home Wiper disk M98 P"homey.g" ; Home Y M98 P"homex.g" ; Home X M98 P"homez.g" ; Home Z M98 P"homec.g" ; Home C (ToolHead)homew.g:
echo "Executing homew.g" G91 M400 M913 W10 ; C MOTOR TO 60% CURRENT G1 H2 W-26 F2000 G92 W-1 G90 M400 M913 W100 ; C MOTORS TO 100% CURRENThomed.g:
echo "Executing homed.g" M400 G92 D0homey.g:
echo "Executing homey.g" G91 ; relative positioning G1 Z5 F2100 H2 ; lift Z relative to current position G1 H1 Y-500 F10000 ; move quickly to Y axis endstop and stop there (first pass) G1 Y5 F10000 ; go back a few mm G1 H1 Y-500 F360 ; move slowly to Y axis endstop once more (second pass) G90 ; absolute positioninghomex.g:
echo "Executing homex.g" G91 ; relative positioning G1 Z5 F2100 H2 ; lift Z relative to current position G1 H1 X400 F10000 ; move quickly to X axis endstop and stop there (first pass) G1 X-5 F10000 ; go back a few mm G1 H1 X400 F360 ; move slowly to X axis endstop once more (second pass) G90 ; absolute positioninghomez.g:
echo "Executing homez.g" G90 ; absolute positioning G1 X0 Y0 F15000 ; go to first probe point M558 K0 P{global.zProbeType} C{global.zProbePin} H{global.zProbeDiveHeightMesh} F{global.zProbeSpeedFeedLevel} T{global.zProbeSpeedTravel} ; set Z probe dive height + speeds G31 K0 X0 Y0 Z0 P{global.zProbeTriggerValue} ; set Z probe trigger value, offset and trigger height G30 K0 ; home Z by probing the bed M558 K0 P{global.zProbeType} C{global.zProbePin} H{global.zProbeDiveHeightMesh} F{global.zProbeSpeedFeed} T{global.zProbeSpeedTravel} ; set Z probe dive height + speeds G31 K0 X0 Y0 Z0 P{global.zProbeTriggerValue} ; set Z probe trigger value, offset and trigger height G30 K0 ; home Z by probing the bed G91 ; relative positioning G1 Z10 F{global.zProbeSpeedFeedLevel}homec.g:
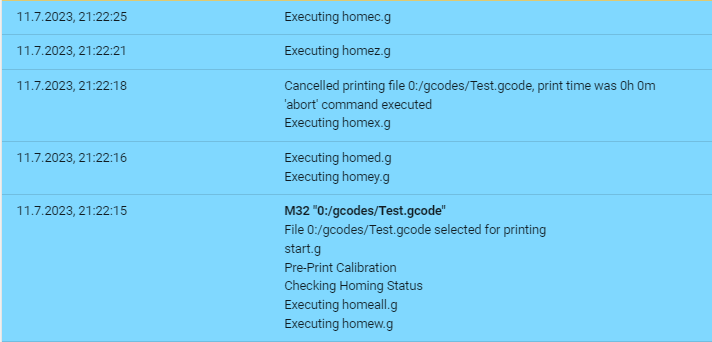
echo "Executing homec.g" G91 M400 M913 C60 ; C MOTOR TO 60% CURRENT G1 H2 C-300 F10000 G92 C0 G90 M400 M913 C100 ; C MOTORS TO 100% CURRENT M98 P"/macros/Toolchanging/Coupler - Unlock" ; open couplerWeirdly enough, with all the prints it shows that the abort is triggered seemingly randomly within the homing sequence, it changes "position" each test more or less.
Here's what a relevant console looks like:
Here's an M122 after it cancelled in case that has any merit...
M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.4 (2023-06-08 23:41:30) running on Duet 3 MB6HC v1.02 or later (standalone mode) Board ID: 08DJM-9P63L-DJ3T0-6J1F4-3S06S-9A1V9 Used output buffers: 3 of 40 (31 max) === RTOS === Static ram: 155012 Dynamic ram: 132568 of which 0 recycled Never used RAM 29524, free system stack 143 words Tasks: NETWORK(1,ready,38.3%,182) ETHERNET(5,nWait,0.3%,317) ACCEL(6,nWait,0.0%,348) HEAT(3,nWait,0.0%,323) Move(4,nWait,0.0%,216) CanReceiv(6,nWait,0.0%,794) CanSender(5,nWait,0.0%,335) CanClock(7,delaying,0.0%,351) TMC(4,nWait,8.7%,59) MAIN(1,running,52.7%,137) IDLE(0,ready,0.0%,30), total 100.0% Owned mutexes: === Platform === Last reset 00:06:38 ago, cause: software Last software reset at 2023-07-11 21:22, reason: User, Gcodes spinning, available RAM 29764, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 MCU temperature: min 43.8, current 44.7, max 44.9 Supply voltage: min 23.6, current 23.8, max 23.9, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.2, current 12.3, max 12.5, under voltage events: 0 Heap OK, handles allocated/used 495/389, heap memory allocated/used/recyclable 24576/23948/1428, gc cycles 61 Events: 0 queued, 0 completed Driver 0: standstill, SG min 0, mspos 136, reads 23621, writes 17 timeouts 0 Driver 1: standstill, SG min 0, mspos 552, reads 23621, writes 17 timeouts 0 Driver 2: standstill, SG min 0, mspos 616, reads 23622, writes 17 timeouts 0 Driver 3: standstill, SG min 0, mspos 136, reads 23622, writes 17 timeouts 0 Driver 4: standstill, SG min 0, mspos 952, reads 23618, writes 21 timeouts 0 Driver 5: standstill, SG min 0, mspos 296, reads 23622, writes 17 timeouts 0 Date/time: 2023-07-11 21:29:04 Slowest loop: 13.85ms; fastest: 0.04ms === Storage === Free file entries: 19 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 0.8ms, write time 2.5ms, max retries 0 === Move === DMs created 125, segments created 9, maxWait 182660ms, bed compensation in use: mesh, height map offset 0.000, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled === DDARing 0 === Scheduled moves 558, completed 558, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is doing "G4 P500" in state(s) 0 0, running macro Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000000 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === Filament sensors === Extruder 0: no data received Extruder 1: no data received Extruder 2: no data received Extruder 3: no data received === CAN === Messages queued 4171, received 8749, lost 0, boc 0 Longest wait 1ms for reply type 6018, peak Tx sync delay 111, free buffers 50 (min 49), ts 1995/1994/0 Tx timeouts 0,0,0,0,0,0 === Network === Slowest loop: 36.21ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = Interface state: active Error counts: 0 0 0 1 0 0 Socket states: 5 2 2 2 2 0 0 0 = WiFi = Interface state: disabled Module is disabled Failed messages: pending 0, notready 0, noresp 0 Socket states: 0 0 0 0 0 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0Everything works fine with the print job if i remove the homing from it and just home manually before...
Any ideas?
-
Anyone? @dc42 ?
-
@Diamondback said in [3.5b4] Homing process issues unwanted 'abort' command:
M98 P"homeall.g"
Does it still happen if you use G28 instead of calling it with M98?
-
@Phaedrux That actually works fine
 That's very helpful already, but why does this happen? It used to work fine but the regression happened with one of the 3.5 betas...
That's very helpful already, but why does this happen? It used to work fine but the regression happened with one of the 3.5 betas...
Does this have potential consequences for other macro calls? -
@Diamondback What board are you using? What version of RRF (the output from M122 would probably be useful).
-
=== Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.4 (2023-06-08 23:41:30) running on Duet 3 MB6HC v1.02 or later (standalone mode) Board ID: 08DJM-9P63L-DJ3T0-6J1F4-3S06S-9A1V9 Used output buffers: 3 of 40 (40 max) === RTOS === Static ram: 155012 Dynamic ram: 133920 of which 0 recycled Never used RAM 27692, free system stack 117 words Tasks: NETWORK(1,ready,136.5%,165) ETHERNET(5,nWait,19.8%,115) ACCEL(6,nWait,0.0%,348) HEAT(3,nWait,6.3%,323) Move(4,nWait,187.8%,210) CanReceiv(6,nWait,10.3%,769) CanSender(5,nWait,1.8%,326) CanClock(7,delaying,1.7%,349) TMC(4,nWait,128.2%,59) MAIN(1,running,47.7%,137) IDLE(0,ready,0.4%,30), total 540.6% Owned mutexes: === Platform === Last reset 196:22:54 ago, cause: power up Last software reset at 2023-07-27 13:42, reason: User, Gcodes spinning, available RAM 27548, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x04 MCU temperature: min 20.8, current 44.6, max 48.0 Supply voltage: min 23.3, current 23.6, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.3, max 12.5, under voltage events: 0 Heap OK, handles allocated/used 495/415, heap memory allocated/used/recyclable 24576/24092/1072, gc cycles 90579 Events: 0 queued, 0 completed Driver 0: standstill, SG min 0, mspos 456, reads 20344, writes 403 timeouts 0 Driver 1: standstill, SG min 0, mspos 200, reads 20344, writes 403 timeouts 0 Driver 2: ok, SG min 0, mspos 382, reads 20340, writes 407 timeouts 0 Driver 3: ok, SG min 0, mspos 275, reads 20341, writes 407 timeouts 0 Driver 4: standstill, SG min 0, mspos 520, reads 20193, writes 555 timeouts 0 Driver 5: standstill, SG min 0, mspos 456, reads 20345, writes 403 timeouts 0 Date/time: 2023-08-08 15:06:55 Slowest loop: 221.89ms; fastest: 0.04ms === Storage === Free file entries: 13 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 3.2ms, write time 147.5ms, max retries 0 === Move === DMs created 125, segments created 29, maxWait 87145020ms, bed compensation in use: mesh, height map offset 0.000, ebfmin 0.00, ebfmax 0.00 next step interrupt due in 125 ticks, disabled === DDARing 0 === Scheduled moves 89768, completed 89743, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 5], CDDA state 3 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 0 is on, I-accum = 0.0 Heater 4 is on, I-accum = 0.0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 3 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is doing "M150 R0 U0 B0 P0 S64 F0" in state(s) 0 0 0 0 0, running macro Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is doing "M0" in state(s) 0 0, running macro, sync state 1 Queue2 is idle in state(s) 0 Q0 segments left 1, axes/extruders owned 0x10000007 Queue 0 has 'M150 R0 U0 B0 P0 S64 F0' for move 89751 Queue 0 has 'M150 R0 U0 B0 P0 S64 F0' for move 89757 Queue 0 has 'M150 R0 U0 B0 P0 S64 F0' for move 89763 Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === Filament sensors === Extruder 0: no data received Extruder 1: no data received Extruder 2: no data received Extruder 3: no data received === CAN === Messages queued 9605379, received 14701227, lost 0, boc 0 Longest wait 2ms for reply type 6013, peak Tx sync delay 24761, free buffers 50 (min 48), ts 3534871/3534870/0 Tx timeouts 0,0,0,0,0,0 === Network === Slowest loop: 3684.59ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = Interface state: active Error counts: 0 0 0 1 0 0 Socket states: 5 5 2 2 2 0 0 0 = WiFi = Interface state: disabled Module is disabled Failed messages: pending 0, notready 0, noresp 0 Socket states: 0 0 0 0 0 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0