Assissted open loop Mode
-
Hi, i run two 1HCL with magnetic enoders in my printer, first i wanted to use closed loop mode but with low inductanse motor and 48V they are really loud at low speeds and standstill. Now I want to go with assisted open loop. But I have some questions about it.
-
Is the stepper driver running in spreadcycle when I use assisted open loop?
-
If that's the case, can you also optimize the driver using the stepper register?
-
If a step is lost, is it actively corrected or is the Motor current just increased to minimize the error
-
Is the current reduction based on coolstep?
-
How low should I go with Motor current min Limit?
Thx
-
-
@Tech_Sam03 said in Assissted open loop Mode:
Hi, i run two 1HCL with magnetic enoders in my printer, first i wanted to use closed loop mode but with low inductanse motor and 48V they are really loud at low speeds and standstill.
With which firmware version? More recent firmware versions are much quieter on the 1HCL than the earlier versions.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I run Version 3.5.4 on them.
-
@Tech_Sam03 something isn't right, maybe the tuning. Using 3.5.4 firmware, if correctly set up they should be silent at standstill, even quieter than in open loop mode.
Assisted open loop mode does not correct for lost steps. It increases the motor current when the error gets high in an attempt to pre-empt missing a step. The current reduction isn't based on coolstep. The driver runs in spreadCycle mode.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I tried a P therm of 10/15/20/25/30/40. Smaller P therms with smaller D therms were quieter but still loud.Also a high A therm makes it also noisy. What I noticed was that if I put light pressure with a finger on the axis when it is stationary, the noise almost completely disappears. It's the same at slow speeds. At first I thought it was oscillations from a too high D therm, so I tried to go down to a D therm of only 0.01, but then my P therm oscillates a bit +/- ~5 .Then they are actually very quiet. How much oscillation is ok for the P therm?
-
@Tech_Sam03 yes the D term makes the greatest contribution to motor noise. There is a balance to be struck between the P and D terms. A larger P term is more prone to oscillation and needs a larger D term to control it. So I suggest you pick the highest D term in the range 0.01 to 0.05 that doesn't make the motor noise excessive, and then adjust the P term to be as high as possible while ensuring that any oscillation when the speed changes is heavily damped.
Keep the I term at zero initially while adjusting this, because the I term can also contribute towards oscillation if it is too high.
The A term will make the motor noisier during acceleration, but if you have tuned the A term as we suggest then this is necessary if you want to ensure precise tracking between actual and commanded movement. On a CoreXY machine I suggest you try pure X movements, pure Y movements and diagonal movements while tuning the A term because a single value won't be optimum for all of these move types. A smaller A term will result in a slight lag between commanded and actual position, which you would get in open loop mode anyway.
@T3P3Tony runs a CoreXY machine with closed loop motors so he may be able to offer further advice.
HTH David
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@T3P3Tony
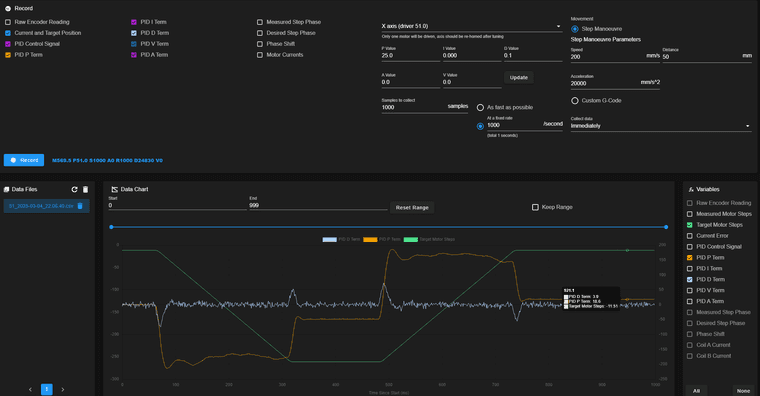
@dc42 I followed your instructions and it helped a little, but the loud noise persists. Here are some videosP=25 D=0.1
D0.1.mp4
P=25 D=0.0
D0.0.mp4
Driver in spreadcycle
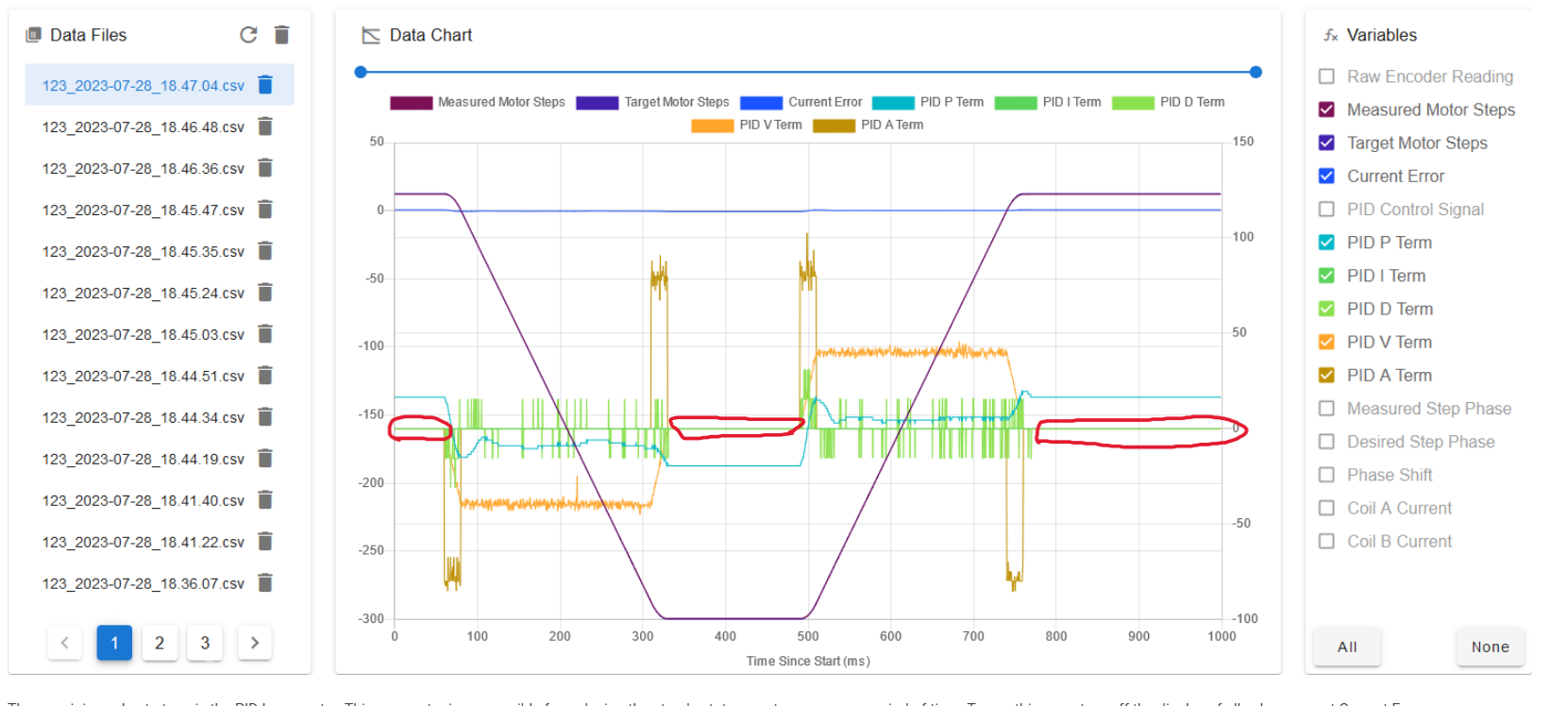
spreadcycle.mp4Also, what I noticed is that when standing still my d therm oscillates slightly which is not visible in the tuning plot in the duet documentation guide.
-
 undefined Tech_Sam03 marked this topic as a question
undefined Tech_Sam03 marked this topic as a question
-
@T3P3Tony
@dc42
I found the problem!!!the load noise is caused by a slight misplacement of the encoder, if I turn the motor another 90 degrees the noise disappears completely when I slightly move the pcb. Is there a good way to align the encoder pcb? Also the D therm goes almost to zero when the motors are standing still!
Here is a video:
encoder.mp4 -
undefined Tech_Sam03 has marked this topic as solved
-
@Tech_Sam03 what size motor are you using the encoder with?
D=0.1 is rather high. Try a value around 0.02 and reduce the P term if that fails to control instability.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I run two LDO 42SHT48-2504AC Steppers. I connected a quadrature encoder with 1000PPR for testing and now they are completly silent also the d therm goes almost to zero at motor standstill. Is it maybe electrical noise that interrupt the magnetic encoder signal?
-
undefined Tech_Sam03 marked this topic as a regular topic
-
undefined Tech_Sam03 marked this topic as a question
-
After extensive testing, I concluded that something was distorting my sensor reading. Since I had two SameSky CUI AMT10E3 capacitive encoders.

I set them to 2500PPR and mounted them. Now closed loop runs whisper quiet. Here are two examples: