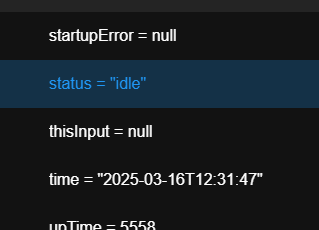
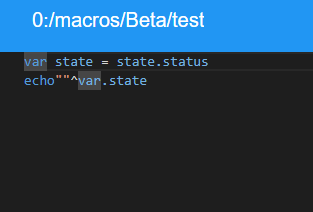
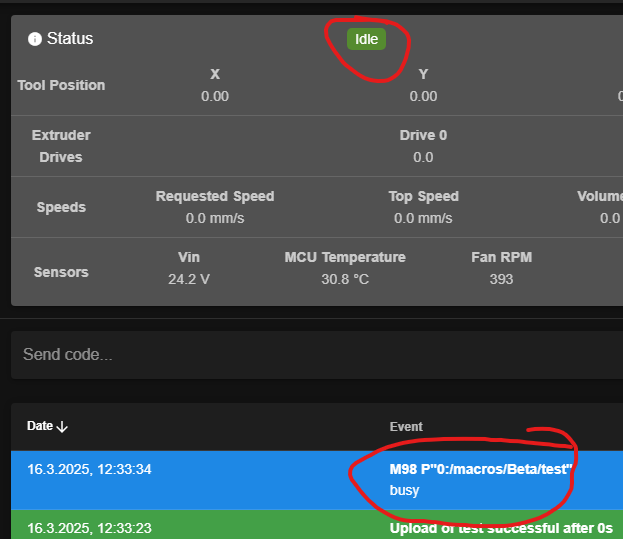
In dwc, state.status is displayed as idle as well as in the object model. However, busy is displayed when I query state.status via meta commands.
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.6.0-rc.1 (2025-02-28 14:59:42) running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: 9458S-K296U-D65J0-40KMW-LM03Z-R6DMH
Used output buffers: 1 of 40 (29 max)
=== RTOS ===
Static ram: 94764
Dynamic ram: 95596 of which 392 recycled
Never used RAM 50716, free system stack 188 words
Tasks: NETWORK(1,nWait 7,16.2%,173) HEAT(3,nWait 6,0.0%,350) Move(4,nWait 6,0.0%,353) TMC(4,nWait 6,0.8%,99) CanReceiv(6,nWait 1,0.1%,771) CanSender(5,nWait 7,0.0%,336) CanClock(7,delaying,0.0%,348) MAIN(1,running,82.0%,402) IDLE(0,ready,0.1%,29) USBD(3,blocked,0.0%,147) AIN(4,delaying,0.8%,261), total 100.0%
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 01:37:25 ago, cause: power up
Last software reset at 2025-03-14 07:38, reason: User, Gcodes spinning, available RAM 49956, slot 1
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00489000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
=== Storage ===
Free file entries: 20
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 6.7ms, write time 92.6ms, max retries 0
=== Move ===
Segments created 0, maxWait 0ms, bed comp in use: none, height map offset 0.000, hiccups added 0/0 (0.00/0.00ms), max steps late 0, ebfmin 0.00, ebfmax 0.00
Pos req/act/dcf: 0.00/0/0.00 0.00/0/0.00 0.00/0/0.00
No step interrupt scheduled
Driver 0: standstill, SG min 0, r/w errs 0/0, ifcnt 14, reads/writes 45469/14, timeouts 0, DMA errs 0, CC errs 0
Driver 1: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45473/10, timeouts 0, DMA errs 0, CC errs 0
Driver 2: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45472/10, timeouts 0, DMA errs 0, CC errs 0
Driver 3: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45472/10, timeouts 0, DMA errs 0, CC errs 0
Driver 4: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45473/10, timeouts 0, DMA errs 0, CC errs 0
Driver 5: not present
Driver 6: not present
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
=== CAN ===
Messages queued 51122, received 303963, lost 0, ignored 0, errs 619, boc 0
Longest wait 2ms for reply type 6062, peak Tx sync delay 959, free buffers 26 (min 25), ts 27703/27702/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 205.88ms; fastest: 0.00ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0)
HTTP sessions: 1 of 8
=== WiFi ===
Interface state: active
Module is connected to access point
Failed messages: pending 0, notrdy 0, noresp 0
Firmware version 2.2.1
Module reset reason: Power up, Vcc 3.40, flash size 2097152, free heap 39188
MAC address f0:08:d1:03:80:57
IP address 192.168.178.65
Signal strength -45dBm, channel 6, mode 802.11n, reconnections 0
Clock register 00002002
Socket states: 0 0 0 0 0 0 0 0