Auto Level Question/Issue?
-
I think I need to ask for clarification on what you're expecting to happen, because I'm not sure really.
You say you want to get your motors back into sync, but don't want to home to zmax with endstops due to the time it takes to travel.
You're using G32 to run bed.g before a print and loading a heightmap for grid compensation with g29 s1.
What are you expecting G32 (bed.g) to do? When it runs do you see the z motors turning at all?
When the print starts, do you see the z motors turning to compensate for the bed surface? (G29) -
what I want to happen is lets just say new build. I want to run g28 home, all axes, then a g29 to prepare a heightmap and then run g32 before a print to sync my motors so they are perfectly plane. and then start a print.
when I run g32 the z motors are turning, when a [print starts it does compensate for bed surface. but What I want to know is why it does not level the motors prior to a print when I run g32, even if I run it numerous times it does not show me different parameters.
-
basically I want the leadscrew adjustment to be made prior to printing
-
@jkdp said in Auto Level Question/Issue?:
I already have the s4 command
m561
G28 ; home
M401 ; deploy Z probe
G30 P0 X5 Y5 Z-99999 ;probe near front right (FR) lead screw
G30 P1 X5 Y720 Z-99999 ;probe near rear right (RR) lead screw
G30 P2 X650 Y720 Z-99999 ;probe near real left (RL) lead screw
G30 P3 X650 Y5 Z-99999 S4 ;probe near a front left (FL)
G30 p4 X325 Y350 z-99999
M402 ; retract probe
G29 S1You are defining 5 probe points and using S4 on the last-but-one. So the final probe point will be ignored. You should either delete the final (G30 p4) point, or move the S4 parameter to that one.
However, I am not sure that is causing the problem. Please run M671 without parameters and check the response, to ensure that your M671 command in config.g was accepted.
-
SOME PROGRESS!! got this msg:
10:09:58 PM
M671 Z leadscrew coordinates are not configured -
I think my error be in my mapping or in my lead screw position if someone can look over that.
-
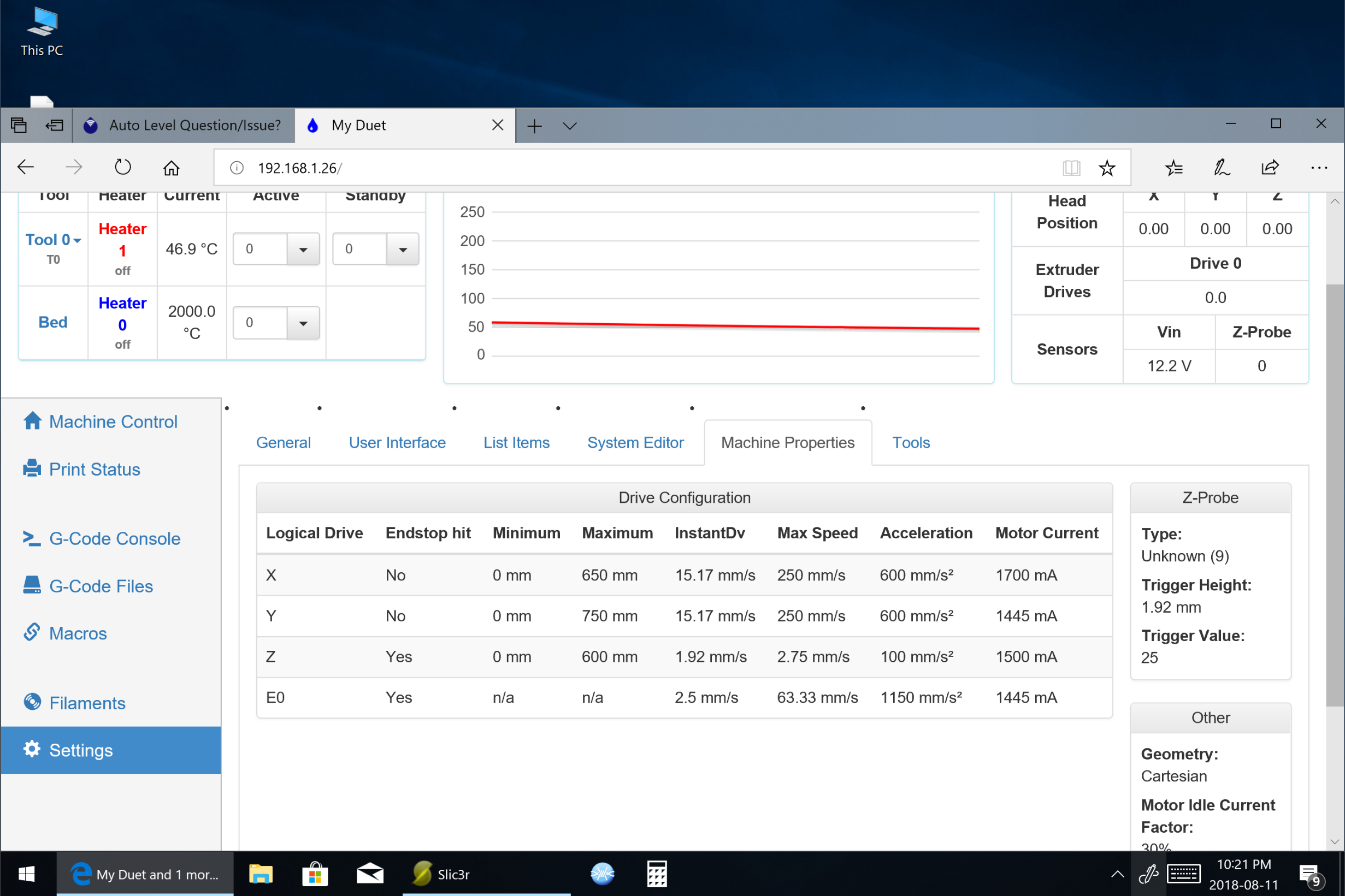
in the "settings" tab - under "Machine Properties" shouldn't all 4 z motors be
 listed there?
listed there? -
is the location of my m671 command in my config.g file in the correct location I do have it after the m669 and m667 but....
-
I found the problem. Stupid user error... I've been battling with this past 3 months.....
M671 X:-150:-150:800:800 Y-10:850:850:-10 S1
I have a : in front of the x axis coordinate X:-150
Ugh...
But Thank you very much guys administrator and Phaedrux wouldn't have been able to figure this one out without you guys.
-
also one other question should I have
M92 X160 Y80 Z1605 E418 ; Set steps per mm
or should I have this
M92 X160 Y80 Z1605:1605:1605:1605 E418 ; Set steps per mm
with the same idea for all parameters with z axis movement settings with-in config.sys
-
correction config.g
-
ALSO one other thing now when I run g32 I get the leadscrew adjustment made
") but I am not able to see a heigh map from the gui.??
but I am not able to see a heigh map from the gui.?? -
Do you mean g29?
Can you view the height map in the DWC?
-
You need only one Z motor current in your M906 command. It will be applied to all the Z motors.
To generate a height map, you must run G29.
-
yes I do have the height map with g29 thanks again guys
-

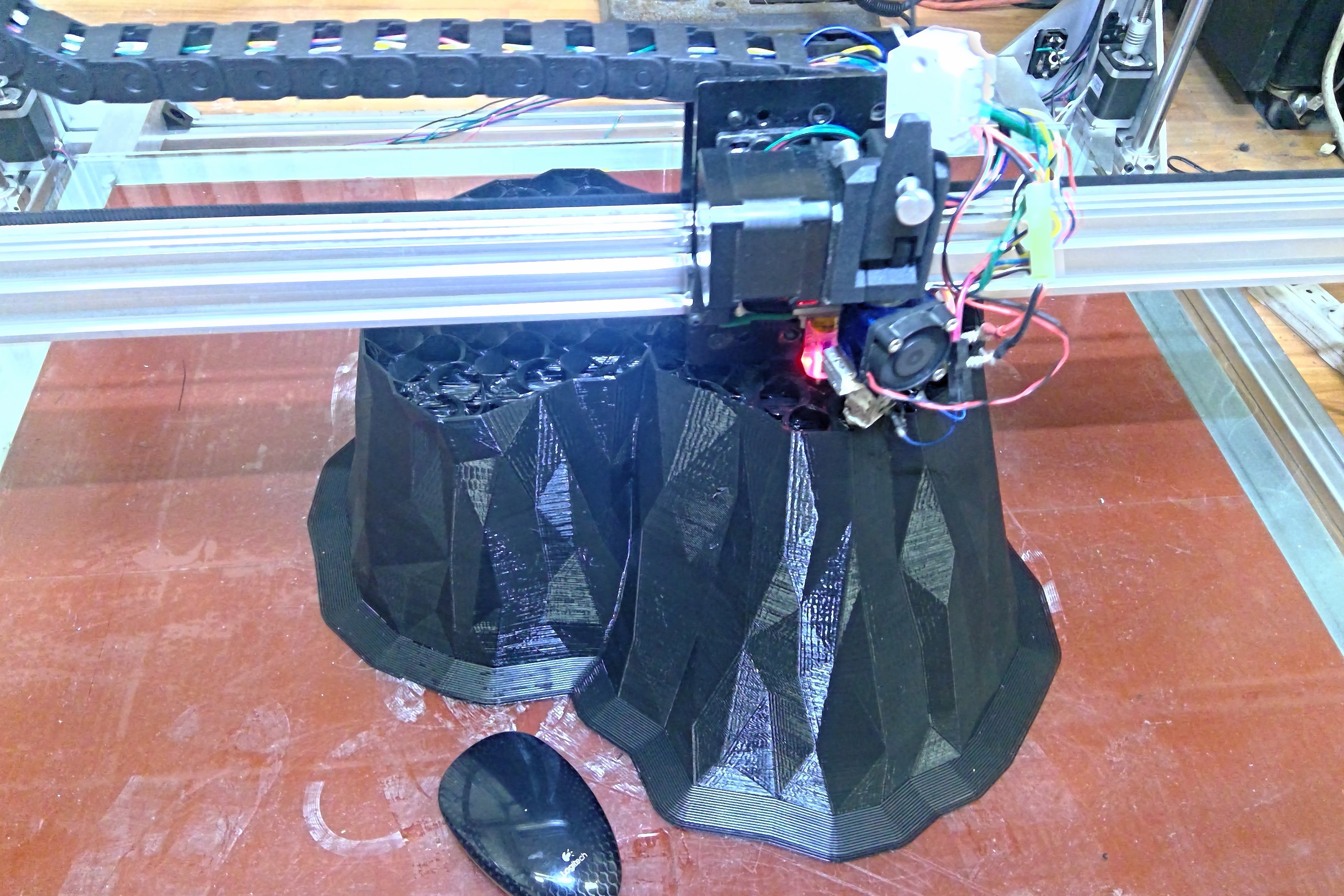
a finished print, in case any one wanted to see it.
-
On another note, I"ve started printing a low poly waitier hands. ANd am seeing a lot of ringing and cannot eliminate it no matter what I try. I did notice it on my t-rex from MakerBot which scaled and printed beautifully, but because there were many small curvatures the to form the skull ur not able to see them as clearly. But they are there, visibly. some pics of the ringing with the low poly waiter hands. any advice, I've played around with jerk and accelrations and speeds from 50mm/s-200mm/s. and cannot get rid of the ringing.

adjusting
-
@jkdp said in Auto Level Question/Issue?:
a finished print, in case any one wanted to see it.
That is massive! What are you going to do with it?
-
@jkdp have you seen the release notes for 2.02 beta?
https://forum.duet3d.com/topic/6405/new-beta-firmware-2-02beta1
Dynamic Acceleration Adjustment (DAA). This is an experimental feature that adjusts the acceleration and deceleration of moves independently, to minimise excitation of mechanical resonance at a specified frequency, thereby reducing ringing. By default this feature is disabled. Use the M593 command to enable and configure it.
-
haha, not much building the machine and testing, and calibrating it for resale purpose. Ive had a few request here in Toronto locally and have build a few small machines, But this has been a crazy 8 month battle from design to build. But looking good now... finally.... Larger machines are soo much harder to calibrate than smaller ones I've learnt, but think I've got the hang of it, besides this ringing...
NO in regards to the notes I will look at them, right now... and report bak, you guys are quick with the responses I really appreciate it....