Duet WIFI stepper motor problems
-
I am building a Hypercube Evolution, and configuring it as CoreXY using the RepRapFirmware Configuration Tool.
The board is a Duet WIFI Rev. 1.04
Firmware version 2.0 (RTOS) (2018-06-05b3)
WiFi Server Version: 1.21
Web Interface Version: 1.21.1I am using five of these Nema 17 stepper motors: https://www.omc-stepperonline.com/nema-17-bipolar-45ncm-64ozin-2a-42x40mm-4wires-w-1m-cable-and-connector-17hs16-2004s1.html
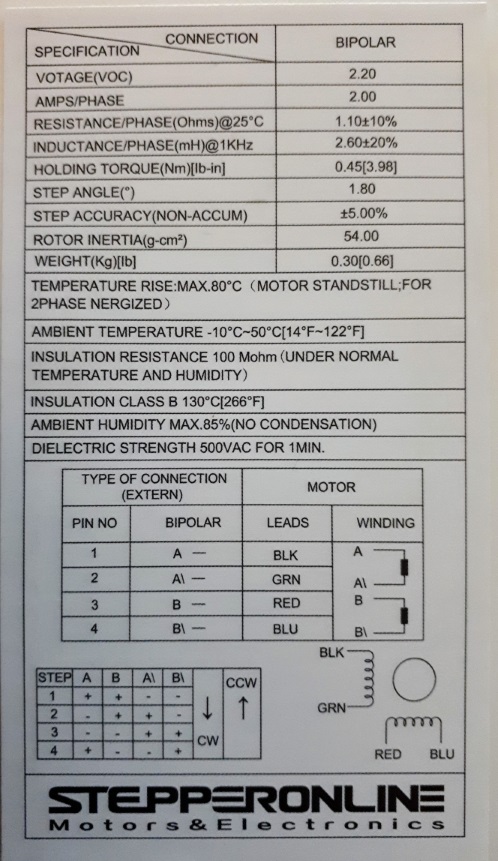
These are wired to the E0, X, Y and finally ZA and ZB in series. (Dual Z axis version)
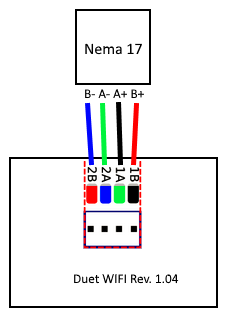
The wiring is done like this: (Wire colors are from the stepper motors)
But I am having trouble getting the system to run.
Every Z, X, and Y test seems to trigger Z movement.
And the two Z stepper motors seems to turn the opposite direction of each other. One clockwise, and the other one anti clockwise.I have checked the wiring multiple times, and they are all connected the same way.
Am I missing something important?
-
You have connected the motors to the Duet incorrectly. Black and green should be at one end of the 4-pin connector on the Duet, blue and red at the other end. For example, you could use the order red-blue-green-black.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thank you.
If I understand you correctly, the actual stepper motor wire colors should then match the connector color codes on the Duet WIFI wiring diagram?
https://duet3d.dozuki.com/Wiki/Duet_Wiring_DiagramsThe connections would then look like this:
Stepper Motor / Duet WIFI:
B+ (red) / 2B (red)
B- (blue) / 2A (blue)
A- (green) / 1A (green)
A+ (black) / 1B (black) -
That's correct, when the wires come straight out of the stepper motor. It's not always correct when the leads plug in to the motors, because there are at least two different pinouts for the connector on the motor, and the lead may have been made up to suit the other one.
The problem is that the pin naming 1A/1B/2A/2B (which is copied from the stepper motor datasheets) doesn't make it clear that the phases are 1 and 2, and the A and B refer to the polarity of the phase.
-
Colormatching worked.
Thank you very much.
Now I have to figure out why my Y axis is reversed, but that's a different challenge.
-
Change the direction with the M569 command
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S0 ; Drive 1 goes backwards