I am building a Hypercube Evolution, and configuring it as CoreXY using the RepRapFirmware Configuration Tool.
The board is a Duet WIFI Rev. 1.04
Firmware version 2.0 (RTOS) (2018-06-05b3)
WiFi Server Version: 1.21
Web Interface Version: 1.21.1
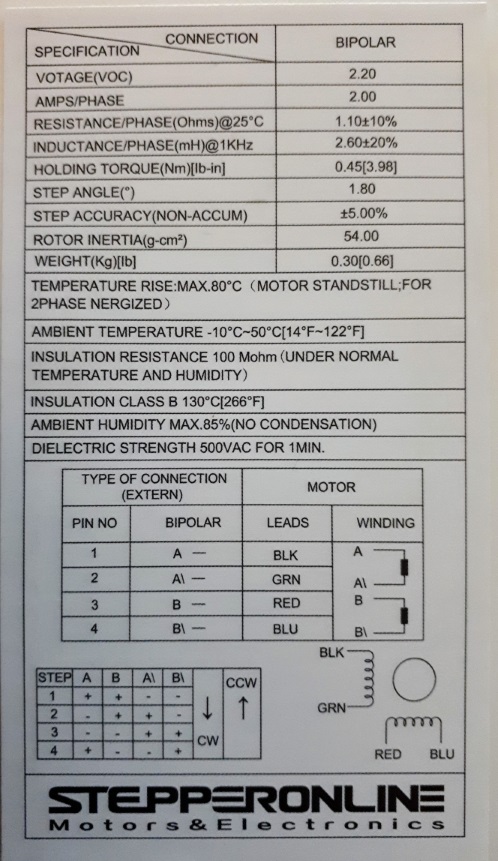
I am using five of these Nema 17 stepper motors: https://www.omc-stepperonline.com/nema-17-bipolar-45ncm-64ozin-2a-42x40mm-4wires-w-1m-cable-and-connector-17hs16-2004s1.html
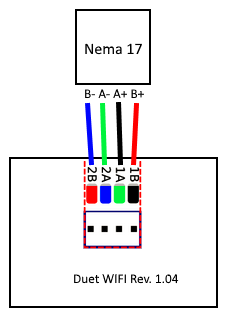
These are wired to the E0, X, Y and finally ZA and ZB in series. (Dual Z axis version)
The wiring is done like this: (Wire colors are from the stepper motors)
But I am having trouble getting the system to run.
Every Z, X, and Y test seems to trigger Z movement.
And the two Z stepper motors seems to turn the opposite direction of each other. One clockwise, and the other one anti clockwise.
I have checked the wiring multiple times, and they are all connected the same way.
Am I missing something important?
")
