How to extrude until trigger
-
OK,
even if Z use driver 4:5 it doens't take E4 E5 endstop
P4 from M584 say E0 for 4th axe U and only 4 axes
So I need to use P8 for U V W and A? B? -
@dc42 said in How to extrude until trigger:
Are you sure you can't use extruder stall detection instead?
I took a look in the doc, but I don't understand how stall detection will help me. how did you see the thing?
I did not take the time to test the M584, for the endstop, I'm experiment without for the moment.
-
Back from holidays!
Ok it works, if I affect a 4th axis "A" it has the E0 endstop.
By mapping the axis A to the extruder E0, I can extrude and control the position of my filament.M569 P5 S0 ; Driver 5
M584 X0 Y1 Z2 E5 A5 P4 ; Extruder E and A-axis on the driver 5
... set step / mm speed ...
M574 X1 Y1 A1 S1 ; Set active high endstopsSo if I want to extrude normally I use as usual G1 Exx
And If I want to get the filament back to endstop I use the function G1 A-1000 S1Thank you DC42 !!!
What is the M577 command for? in which situation to use it?
-
Another question...
Can we use the laser filament sensor as endstop for an axis? If yes, how?
-
@nicolab28 said in How to extrude until trigger:
Another question...
Can we use the laser filament sensor as endstop for an axis? If yes, how?
That's not supported, or planned at present. Would you be wanting to extrude until the filament monitor detects motion, or until it detects no motion?
-
both ... It's mostly to have contactless sensors.
2 extruders (a bowden and a direct drive)
In fact I have an extruder that pushes the filament to the second which is a direct drive.
I have an endstop that is just after the first extruder, which serves me to change filament. I retract until endstop, I retract a few millimeters again, and I change my filament.
And I push the filament until the second endstop, before the direct drive, I push a few millimeters to hang the direct drive, and I disengaged the first extruder that pushed the filament.My printer is big enough, my bed is 500x500, I have a long tube of ptfe, and it's quite complicated to be precise enough in the position of the filament.
-
@nicolab28 said in How to extrude until trigger:
In fact I have an extruder that pushes the filament to the second which is a direct drive.
I have an endstop that is just after the first extruder, which serves me to change filament. I retract until endstop, I retract a few millimeters again, and I change my filament.
And I push the filament until the second endstop, before the direct drive, I push a few millimeters to hang the direct drive, and I disengaged the first extruder that pushed the filament.You should be able to use extruder stall detection for that one.
You should be able to use extruder stall detection to use the first extruder to push the filament and stop when it reaches the direct drive extruder.
The way endstops are configured and used is scheduled to be reworked in firmware 2.03, so I'll bear your suggestions in mind.
-
I do not think I can use the stall, with the extruder pushing, because the filament must always be engaged in it.
With a servo I engage or I disengage this extruder.But it is to test for the direct drive.
Normally, all parts are finished product tomorrow, I will finally be able to make the first tests ...
-
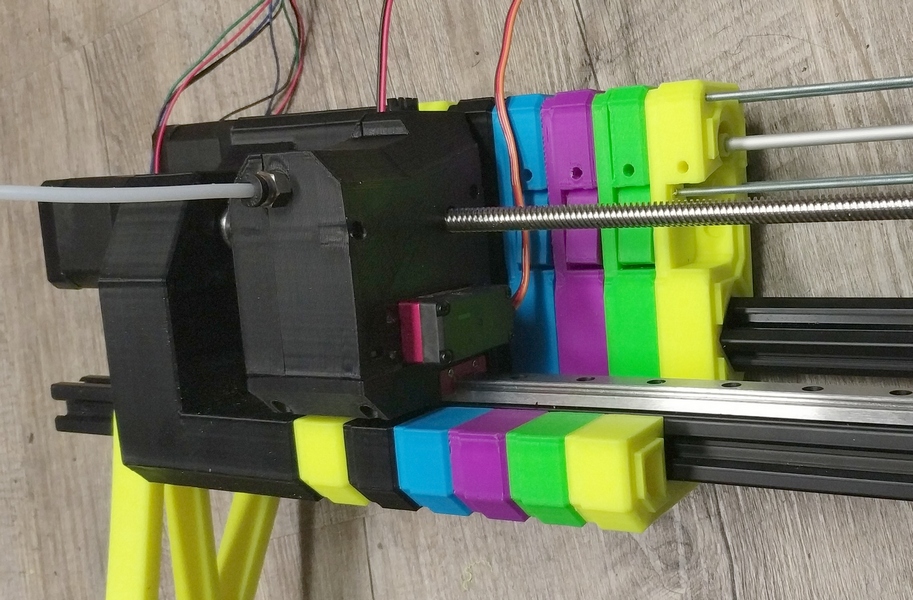
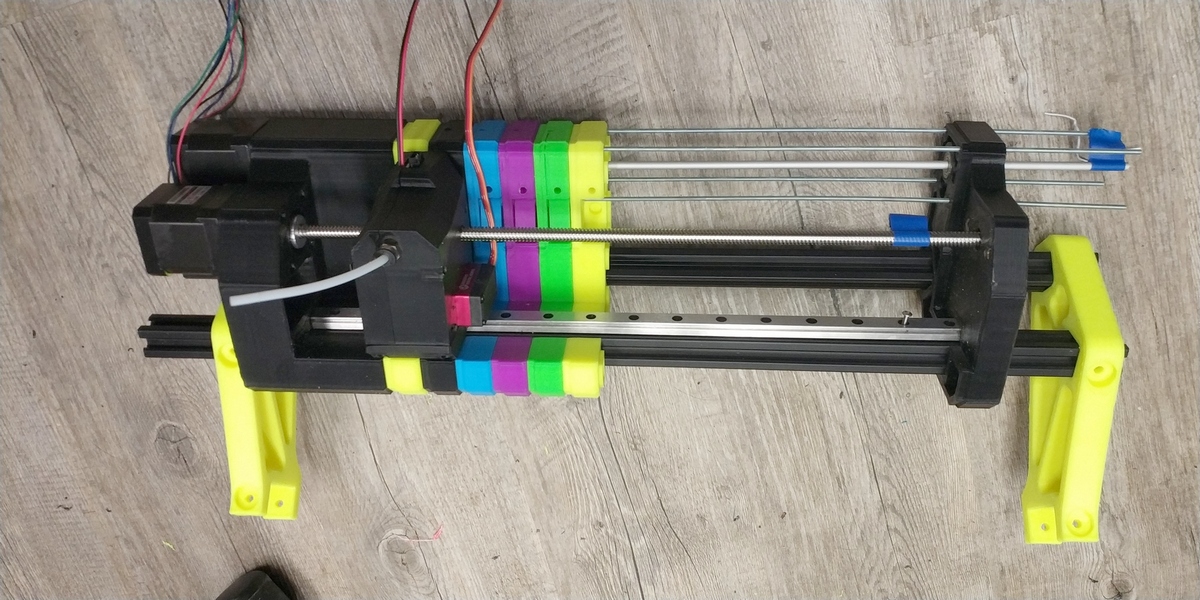
@NicoLab28 im currently doing the same project running a MMU2 with the duet, your welcomed to use my macros if you like. they work ok so far but dont have many miles on them yet so use them as you will. they detect loading and unloading failures. the triggers are very new and not fully tested but seem ok so far
My axes:
A=selector B=filament gear C=idler pulleysi aim to install the laser sensor once it comes back in stock. you can see where ive added space for it.
cheers
Gavtpre0.g ( 1-4 are the same apart from the A and C positions)
G90 ; absolute moves
M913 A100 B100 C100
G1 A1 F2000 ; move selector to T0 position
G1 C4 F10000 ; move idler to T0 position
M400 ; wait for moves to stop
M98 P"tpremaster.g"
M913 A50 B20 C20tpremaster.g (global loading macro)
M591 D0 P2 C3 S0 ; deactivate filament sensor
M574 B2 S0 ; set B axis max endstop to switched low
G91 ; relative moves
G1 B30 S1 F3000 ; feed filament to filament sensor
G92 B0 ; force B to 0mm
G1 B20 F3000 ; feed a bit more to reliably switch sensor and reach tube
M400 ; wait till moves finish
M574 B2 S3 ; set B axis max endstop to sensorless
M581 E0 S0 T2 C0 ; activate trigger 2 on falling edge
M582 T2 ; check filament sensor to confirm loading successful
G4 P4000 ; trial wait to signify it progress
M913 B50 ; reduce motor current to 50% to prevent grinding
M915 B S5 F0 ; set stall guard parameters
G1 S1 B550 F3600 ; fast feed filament into extruder
M591 D0 P2 C3 S1 ; activate filament sensor
G92 B0 ; force B to 0mm
G90 ; absolute movestpost0.g (1-4 are the same apart from C position)
M913 A100 B100 C100
G1 C4
M98 P"tpostmaster.g"
M116 P0
M913 A50 B20 C20tpostmaster.g ( global loading macro)
G91 ; relative moves
G1 E5 B5 F300 ; feed filament into extruder with both B and E axis
;activate laser pew pew pew
G90 ; absolute moves
G1 C78 F10000 ; move C to safe position
M400 ; wait for moves to finish
G91 ; relative moves
M915 E S3 F0 ; set extruder stall parameters
M913 E70 ; lower extruder current by 50%
G1 S1 E100 F3000 ; drive extruder till stall
M913 E100 ; return extruder current to 100%
G90 ; absolute movestfree0.g
M913 A100 B100 C100
M98 P"TipSmoothing.g"
G90 ; absolute moves
G1 C4 F10000 ; select T0 with idler
M98 P"tfreemaster.g"
M913 A50 B20 C20tfreemaster.g (global unloading macro)
M591 D0 P2 C3 S0 ; deactivate filament sensor
G91 ; relative moves
M574 B1 S1 ; set B axis min endstop to switched high temporarily
G4 P4000 ; trial wait to show progress
G1 B-500 S1 F3000 ; retract filament till sensor switches off
G92 B0 ; force B axis position to 0mm
M581 E0 S1 T3 C1 ; activate trigger 3 on rising edge while printing
M582 T3 ; check filament sensor to confirm unloading successful
G1 B-22 F3000 ; retract to position clear of selector
G90 ; absolute moves
;G1 C78 F10000 ; move C to safe position
M400 ; wait for moves to finishtrigger2.g
; for detecting loading problems
M400
M291 P"Loading failure detected" S2 B1trigger3.g
;for detecting unloading problems
M400
M291 P"Unloading failure detected" S2 B1 -
thank you Gavatron3000!
I will look at this very closely!
Yours is a replica of MMU Prusa? -
Yeah it's exactly the same just no electronics
-
My duet seems to have died ...
I was quietly re-doing a home selector, before moving to the configuaration of the extruder. I heard a pitchhh, and a little smell ...I do not understand too much, yet I have already made bad wiring, but not there ...
Unless the M584 X0 Y1 Z2: 4 E3 A8 B9 C9 P6 is not advisable? We can?
I just ordered a new one, I'll try to see what's wrong with the hardware, but I can not access it by http ...
-
nothing by usb too!
hoping that the duex5 and the panel7 have nothing?


-
oh another guy inspired by my desgin
https://a360.co/2ROlq2O
there u go boy. inspire yourself a bit more.latest version.
the levers needs to be easy to access. facing front will be the best yours are unserviceable.
check the new compound lever design and use a simple (and cheap) mg90 .
some day i will buy a duet just for the lulz and make it work. today my country is broke and its too expensive to just buy one for the sake of it.
anyway i hope u make that "nice" desgin work. cheers!
-
I spent a crazy time modeling, adjusting, while everything was already done!
Great minds meet ...For the servo, is there a need for power? I put a 25kg that I had, but a 2kg would be enough?
This would greatly reduce the selector! -
Do you really need a servo? If you accept to engage the gear as soon as the carriage is on the slot, you can juste use an horizontal bearing to push the levers (they need to be re-designed with lateral slopes, though)...
-
It was my first solution, but having tested a Y system, I realized that it was impossible to have the same extrusion speed on both extruders at the same time. (slip, hangs ...)
-
I just tested my board.
An Ethernet Duet 1.04 ordered on 31/10/18, panel7 + duex5She stopped working by making a homing, before touching the stop position.
I had time to do several homing, test the 2 new engines, and test the servo.
Servo connected to socket 9, not in force (25kg> 1.5A in force)I only have the hotend is 24v (the socket is a little twisted), the bed is 220v on a ssr
With the power supply 24v (meanwell 25A measured at 24.15v) only, I only have the blue led VIN that turns on, if I reconnect the fan always on, it works.
In usb, directly on the pc, or by a hub powered, I have my pc that tells me that the device has a peak consomation, duet card appears very briefly in the device manager, I have the 5v which lights up as the 3v, then the 3v collapses as well as the 5v, but the 3v is almost nonexistent.
The usb led is always on, the led diag from time to time, but not strong.When I plug in a power supply of raspberry pi, the 4 leds flash.
If I understand correctly, there is only a short circuit 24v-> 5-3.3v which can burn the card, there I do not see how I could have done ...
Is it serious doctor?
-
test done everything unplugged, only 24v or and USB
-
That's what I felt, not yet looked at what it was ...
I reconnect the new