Flying extruder with 4th axis
-
I'm simulating your setup on my bench. After making the corrections to the config..g and homing files, I found a couple of issues:
-
The M208 U axis limit needs to be set high so that it doesn't artificially limit the U axis movement. So I suggest you add U1000 to your M208 S0 command. I will put a fix for this in the next build.
-
There is something odd happening at the end of homing that causes it to remain busy for about a minute. I am still investigating this.
Once homing is complete, it appears to work properly. On pure Z movements, the U motor moves with the other three. On XY moves, the U motor moves down by an amount depending on the XY distance from centre.
-
-
I does work but the motor its being moved from E1 driver, and the endstop that reads for the U axis is the E0 endstop
-
By the way, i couldn´t respond yesterday because the forum was blocking my messages by marking them as spam,i tried to unlog, log back again, reboot the computer etc. but didn´t work, it looks like now runs fine, i don´t know why.
apart from all you sayd to change i had to add some more features to the code for the U axis, like M92 M 566 M203 M201 M906.
i will put my code back again so anyone can look at it. I forgot to add the M906 and i realized that he was trying to move but with no success, so i added the milliamp value and started working.
The only thing that looks is stopping from working properly is the endstop thing.
The E0 endstop is needed for the autolevel function, so i cannot just use it as U axis endstop
1_1549104900494_homedelta.g
0_1549104900493_config.g -
@ander said in Flying extruder with 4th axis:
I does work but the motor its being moved from E1 driver, and the endstop that reads for the U axis is the E0 endstop
That is exactly as it should be. Endstop inputs are allocated in the order that the corresponding axes are created, regardless of which motor outputs are used for the corresponding motors.
-
@ander said in Flying extruder with 4th axis:
The E0 endstop is needed for the autolevel function, so i cannot just use it as U axis endstop
You can use either the E1 endstop or the Z probe input for your Z probe instead (or the Z endstop input if you don't have a Z endstop switch). See the description of the M558 P parameter.
-
I've fixed some bugs in the additional tower support and put a new binary at https://www.dropbox.com/s/fyvibzm0zl92hiy/Duet2CombinedFirmware.bin?dl=0. I think it is all working now.
-
Hi there
i still have the same issue, i don´t know how exactly change the endstop thing.
Looking on machine status, and pushing by hand the U axis endstop, where Z-probe value is, shows a change from 0 to 1000.
Homing all the towers works fine, the compensation of the U hight when moving X and Y axis seems to work fine too, but the bed leveling doesn´t work, it crashes against the bed and not stopping when the effectors switch is pushed.
Pushing M584 P4 , (head position U) shows a value of 0, after homing shows a value of 747.00, and it doesn´t change even if i move the axis(i don´t know if it´s the way that should work).
Settings/Machine properties, pushing U axis endstop shows E0 "endstop hit" changing to yes.
After using the comand homing, it is showing me the E1 values too, if i touch the efector´s switch by hand " Endstop hit" changes to yes(conections are fine), Minimun and maximun values are n/a just in E1, everything else looks identified.Pd:
By the way, this has nothing to do with all the setup we are working on but sometimes randomly looses conection with the duet and you need to reconnect. -
If you have connected the Z probe to the E1 endstop input, then you need to use P4 C4 in your M558 command.
-
Cool, it works almost fine, but it says that the endstop is allready triggered when doing the mesh levelling
-
Does the Z probe reading indicate correctly when you operate the Z probe switch?
If your printer is out of calibration then you may need to increase the dive height in M558 temporarily to probe from a greater height.
-
I does work fine, triggerring by hand now Z probe changes to 1000 from 0.
The weird thing is that the bed levelling was working correctly before and not anymore.
What value is the height value, the F or the T? -
The dive height is the M558 H parameter.
-
Hi there!
i changed it from 5 to 6, it looks that works fine so far, i have to adjust some parameters like speeds etc. and when it is possible i will post a video of all the setup working.
Looking really cool.
thanks for the help -
Hi there
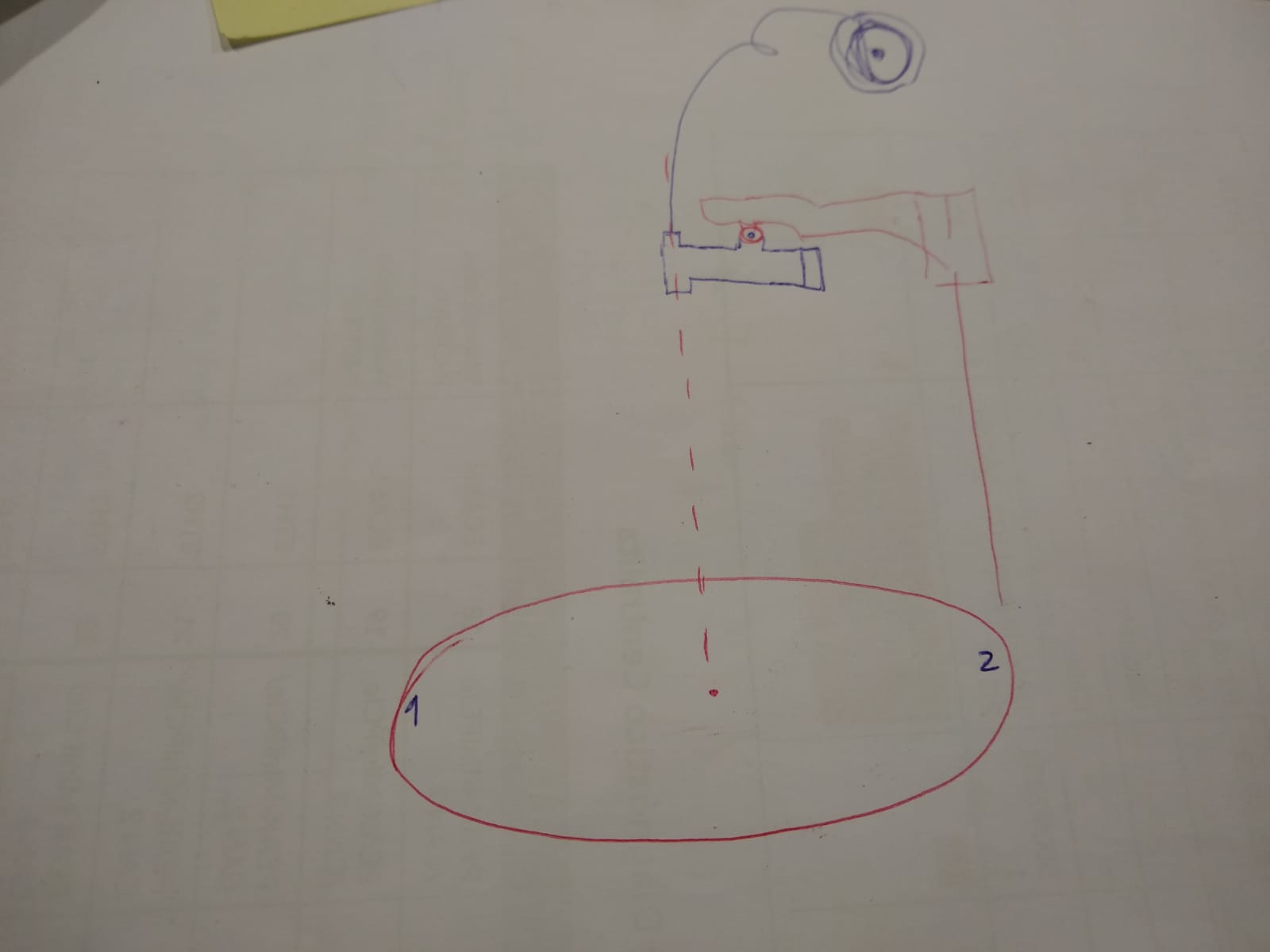
Yesterday a realized that the height it wasn´t the problem, the thing is that when going to certain corner the compensation should be different due to mechanical construction.
If you pay atention to the picture you will realize that reaching point 1 or point 2 is different because the pivoting point is not exactly where the center is, the reason for that was to keep everything well balanced.
So when reaching point 1 the teflon tube was pulling the effector and was trigerring the endstop of z probe while doing bed mesh levelling,
Is it any chance of compensating that via firmware? otherwise i would have to make a complete different system
-
i can tell you point 1 and point 2 parameters
-
The height of the extruder needs to be lower when the effector is at point 1 than it is when the effector is at point 2. You can achieve this by specifying the XY coordinates of the 4th tower (in the M669 command) as being closer to point t than to point 2. I think that to a first approximation, the coordinates of the pivot point may be about right.
-
@ander
What if you just place the extruder assembly fixed to the top of that arm that way you take the pivoting of the assembly out of the equation, or, would simply adding some more tubing allow for the assembly to move without restriction? -
@dc42
M666 function on the new Axis,I am actively testing the new feature changing M669 and M665 R with my delta, 300mm diameter, 410mm z_height from center to center
Here is my case.
I placed 4th_axis near the print edge. M669 X0 Y-140.
And set the rod length of this new axis as same as other towers.When I home all the tower and bring the carriages down a little, let's say 20mm. And move the effector toward the new axis, G1 X0 Y-140.
Then 4th_tower's carriage hit its end_stop( Printer doesn't actually hit the end_stop physically, rather change z_height to avoid physical touch.)
Can it be solved by adding U_axis end_stop offset something similar to M666 and ignore end_stop sensing after homing?When I move the carriages down 30mm from home position, so this is not a big issue. What makes me chore is every time I adjust the PTFE tube from effector to the extruder motor hanging. I have to move the end_stop to proper position physically with a wrench.
I think this can be solved by adding the end_stop offset to the new axis, such as M666.
-
Hi,
I don't know if can help us...
I have a TLM it's a 500 mm tall printer... In the moment of rework extrusion sistem.... I have see that if I use a bowden sistem the ptfe tube has to be very long....
The original sistem uses a fliying extruder fixed to tower carriages with belts... But don't like a lot, maybe this can interfere in towers movement...
At the end I am using a bowden sistem... But with a pulley and a counter weight... That rest moving mass... After I will send photos...
This system allows me to have the extruder about 150 mm from the Print head without practically adding it to that...
This system has the advantage than so not need mechanical (motors)
After I will add photos.
-
@jooil said in Flying extruder with 4th axis:
@dc42
M666 function on the new Axis,I am actively testing the new feature changing M669 and M665 R with my delta, 300mm diameter, 410mm z_height from center to center
Here is my case.
I placed 4th_axis near the print edge. M669 X0 Y-140.
And set the rod length of this new axis as same as other towers.When I home all the tower and bring the carriages down a little, let's say 20mm. And move the effector toward the new axis, G1 X0 Y-140.
Then 4th_tower's carriage hit its end_stop( Printer doesn't actually hit the end_stop physically, rather change z_height to avoid physical touch.)
Can it be solved by adding U_axis end_stop offset something similar to M666 and ignore end_stop sensing after homing?When I move the carriages down 30mm from home position, so this is not a big issue. What makes me chore is every time I adjust the PTFE tube from effector to the extruder motor hanging. I have to move the end_stop to proper position physically with a wrench.
I think this can be solved by adding the end_stop offset to the new axis, such as M666.
I don't understand the problem you are describing. The length you set for the 4th rod should be the length of the Bowden tube - or a little less than that, to allow the Bowden tube to take up a curve. If you change the length of the Bowden tube, you will need to adjust that "rod length" in config.g. Since you have to home all 4 towers together, it is also inevitable that if you change the Bowden tube length, you will need to change the position of the 4th endstop, so that all 4 towers can home together.