Not sure how to set the BLtouch Probe in RepRap 3
-
Hi! This is probably a stupid question, but I cannot get the BLTouch to work after upgrading to from RepRap 2 to 3. Whenever I try to use the BLTouch I get "Error: M280: Invalid gpio port 64"
I have a duet Maestro, and used the RepRap Configurator to setup the new version. I was not able to find out what "PWM Control Channel (BLTouch only)" setting was for, So I left it Blank. I wired the BLtouch as shown in the wiki, and It worked in Reprap 2. I configured it as shown.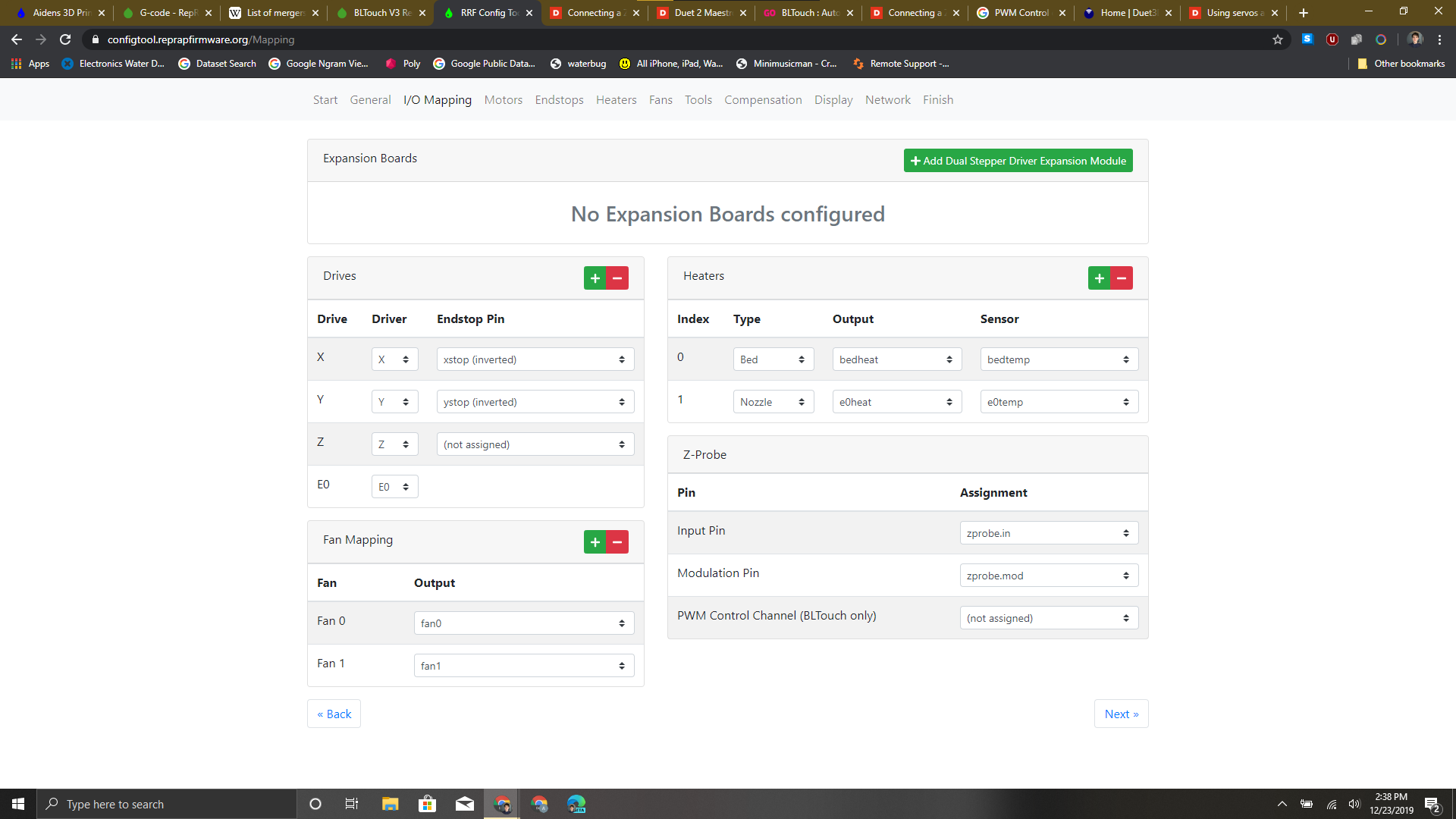
-
-
You should also refer to this guide for manual configuration. I don't think the config tool is currently up to date for this.
https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe#Section_Software_setup_RepRapFirmware_Num_3
-
Post your config.g if you'd like some specific help on what to change.
-
; Configuration file for Duet Maestro (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v2.1.4 on Sun Dec 15 2019 20:30:18 GMT-0500 (Eastern Standard Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Aiden's 3D Printer" ; set printer name ; Network M551 P"[REDACTED]" ; set password M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes backwards M569 P1 S0 ; physical drive 1 goes backwards M569 P2 S0 ; physical drive 2 goes backwards M569 P3 S1 ; physical drive 3 goes forwards M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E94.00 ; set steps per mm M566 X480.00 Y480.00 Z24.00 E300.00 ; set maximum instantaneous speed changes (mm/min) M203 X18000.00 Y18000.00 Z300.00 E1500.00 ; set maximum speeds (mm/min) M201 X1500.00 Y1500.00 Z100.00 E10000.00 ; set accelerations (mm/s^2) M906 X1020 Y1020 Z1020 E1020 ; set motor currents (mA) M84 S0 ; Disable motor idle current reduction ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X200 Y200 Z180 S0 ; set axis maxima ; Endstops M574 X1 S0 P"!xstop" ; configure active-low endstop for low end on X via pin !xstop M574 Y1 S0 P"!ystop" ; configure active-low endstop for low end on Y via pin !ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"e1heat" ; create servo pin 0 for BLTouch M558 P9 C"zprobe.in+zprobe.mod" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X-36 Y-42 Z0.46 ; set Z probe trigger value, offset and trigger height M557 X36:200 Y42:200 S20 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B3988 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M307 H0 B0 S1.00 ; disable bang-bang mode for the nozzle heater and set PWM limit M308 S1 P"e0temp" Y"thermistor" T100000 B3988 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M143 H1 S280 ; set temperature limit for heater 1 to 280C M307 H1 B0 S1.00 ; disable bang-bang mode for the nozzle heater and set PWM limit ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 S"Extruder" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss T0 ; select first tool -
@CaptainSnowball said in Not sure how to set the BLtouch Probe in RepRap 3:
change to
M950 S0 C"zprobe.mod" ; create servo pin 0 for BLTouch
M558 P9 C"zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds -
; Z-Probe M950 S0 C"zprobe.mod" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F120 T6000And then your M280 command would use zprobe.mod I believe.
-
The documentation isn't currently clear, so I'm not sure if the Maestro requires the ^ in M558 or not, but Veti is very probably right.
-
I got the same result with and without it.
either way, the Z probe does not deploy, and I have to Halt it to prevent it from crashing into the glass.
If someone could fix this as well, that would be amazing. it is the deployprobe.g file; deployprobe.g ; called to deploy a physical Z probe ; ; generated by RepRapFirmware Configuration Tool v2.1.4 on Sun Dec 15 2019 20:30:18 GMT-0500 (Eastern Standard Time) M280 P0 S10 ; deploy BLTouch -
dont home but test M280 P0 S10 manually first.
can you try with
M950 S0 C"^zprobe.mod" -
So I added
M950 S0 C"^zprobe.mod"to the end of the config.g file and now everything works fine.
Thanks everyone!