anyway to support this delta machine...
-
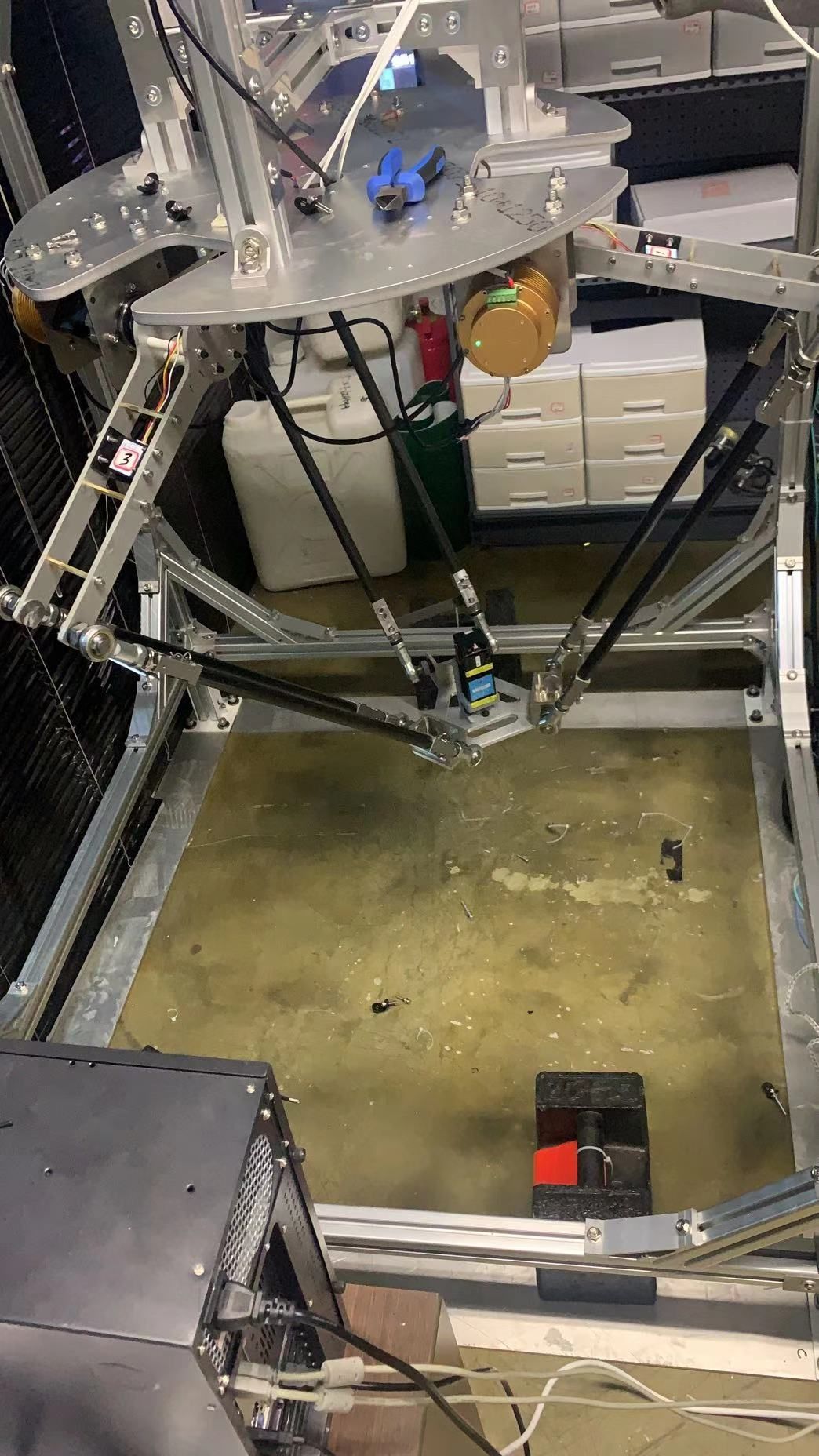
I make a delta robot , and want use it for printing ...
but how to do it ... Is duet support it ?
looks like this
-
Is reprep support it ?
-
If it support , what i should do
-
If it don't support , what i should do if i want use it for printing...
Thx !
-
-
-
Thx! looks Great !
Is it available now ?
-
@live said in anyway to support this delta machine...:
Thx! looks Great !
Is it available now ?
Yes.
Calibrating a rotary delta may be tricky. There is no auto calibration implemented yet.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 OK, I'm being done
In M669, What's Meaning of Rrr and Hxx:yy:xx
i used two radiuss of Static platform and Moving platform past... it's hard to understand Rrr and Hxx...
and any plan to support auto level..
Thx!
-
R is the
- Radius of your UPPER (motor) pivot points, measured to the center of the pivot (joint, shaft, ball).
- MINUS
- The radius of the LOWEST (effector) pivot points, measured to the center of the pivot (joint, shaft, ball).
Example: Upper = 175mm, lower = 53mm, R=123
H is the VERTICAL distance from the UPPER (motor) pivots, measured to the center of the pivot, to the LOWEST (effector) pivots, measured to the center of the pivot, when Z is zero (nozzle just touching bed). In your setup, all three numbers will be identical (so you can just code one, if you wish)
-
Thank you !
I'm sorry.... i just have some trouble...
it's my delta config:
R = 193.65
La = 287.5
Lb = 674
r = 102.46And this is my M669
M669 K10 U287.5 L674 A-60:30 R91.19 H600
it can trige stop correctly, but it can't reach (100,*,0) or more far position , but it should reach it , and it not reach it's max angle
my stop is higher 30° then level..
I think level is 0°, is it correct ?
-
@live said in anyway to support this delta machine...:
it can trige stop correctly
Meaning it homes correctly?
I think level is 0°, is it correct ?
"Level" means the upper arms parallel to the ground.
What happens when, after homing, you G1 X0Y0Z0 F100? Does the nozzle go where you expect?
What about G1 X0 Y0 Z10? Does that lift the nozzle straight up 10mm?
Delta / Kossel printer fanatic
-
yes , it can be home correct
also can up 10mm
but when i do G1 X100 Y0 Z10, it reports outside limits... but it should reach it ...
so.. anywhere config wrong? which config affect it ?
-
@Danal said in anyway to support this delta machine...:
"Level" means the upper arms parallel to the ground.
More precisely, 0 degrees is when the joints at the inner and outer ends of the upper arms are at the same height. Quite often this won't be when the physical structure of the arm is parallel to the ground.