DWC 3.1 on RRF3 - No Axis Home Icons on DWC Dashboard
-
Thanks Chris,
CONFI below...Steve (SputnikOCDd) is helping me
General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"ZARIBO 2" ; set printer name; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S1 ; enable FTP
M586 P2 S1 ; enable Telnet; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S1 ; physical drive 3 goes forwards
M667 S0 ; Cartesian Movement Mode
M584 X0 Y1 Z4:2 E3 P3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X100.00 Y100.00 Z400.00 E830.00 ; set steps per mm
M566 X600.00 Y600.00 Z30.00 E3000.00 ; set maximum instantaneous speed changes (mm/min)
M203 X10800.00 Y10800.00 Z720.00 E4000.00 ; set maximum speeds (mm/min)
M201 X1000.00 Y1000.00 Z200.00 E4000.00 ; set accelerations (mm/s^2)
M906 X600 Y600 Z600 E600 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y-3 Z0 S1 ; set axis minima
M208 X254 Y210 Z205 S0 ; set axis maxima; Endstops
M915 XY F0 S0 H200 R1 ; configure stall detection for sensorless homing
M574 X1 Y1 S3 ; Set endstops controlled by motor load detection; Z-Probe
M950 S0 C"exp.heater3" ; assign GPIO port 0 to heater3 on expansion connector, servo mode
M558 P9 C"^zprobe.in" H3 F400 R0.2 A5 T10800 ; Set Z probe type to switch and the dive height + speeds
G31 X28 Y5.6 Z1.68 P25 ; Set Z probe trigger value, offset and trigger height
M557 X28:240 Y6:203 P5 ; Define mesh grid; Heaters
M140 H0 ; define bed heater
M143 H0 S125 ; set bed heater max temp
M308 S0 P"bedtemp" Y"thermistor" T100000 B3950 ; bed temp thermistor settings
M950 H0 C"bedheat" T0 ; bed heater pin nameM308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; E0 hotend thermistor
M950 H1 C"e0heat" T1 ; E0 pin name; Fans
M950 F0 C"fan0" ; part fan
M950 F1 C"fan1" ; extruder fan
M106 P0 S0 H-1 ; part fan not temperature controlled
M106 P1 S1.0 H1 T45 ; extruder fan temp controlled at 45C; Tools
M563 P0 D0 H1 ; Define tool 1
G10 P0 X0 Y0 Z0 ; Set tool 1 axis offsets
G10 P0 R0 S0 ; Set initial tool 1 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
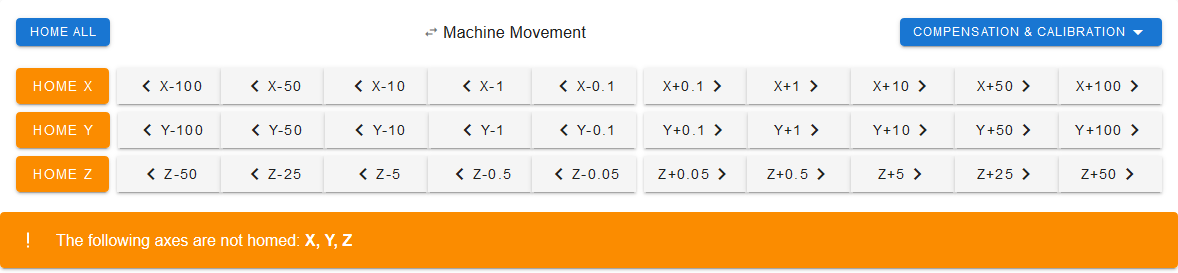
I just uploaded your config.g to my machine and tried to reload the web interface, and all the buttons are displayed correctly for me:
Please make sure that you are using the latest DWC 3.1.0 (see Settings -> General).
-
Thats is completely weird
-
@Kiwi3D What does
M409 K"move.kinematics"show? -
@chrishamm said in DWC 3.1 on RRF3 - No Axis Home Icons on DWC Dashboard:
M409 K"move.kinematics"
Is that something I need to type, not sure of the question, sorry
Ray
-
@Kiwi3D Yes, type that in the G-code console and post the output here.
-
-
-
I got a result 2nd time
M409 K"move.kinematics"
{"key":"move.kinematics","flags":"","result":{"deltaRadius":105.600,"homedHeight":250.000,"name":"delta","printRadius":85.0,"towers":[{"angleCorrection":0,"diagonal":215.000,"endstopAdjustment":0,"xPos":-91.452,"yPos":-52.800},{"angleCorrection":0,"diagonal":215.000,"endstopAdjustment":0,"xPos":91.452,"yPos":-52.800},{"angleCorrection":0,"diagonal":215.000,"endstopAdjustment":0,"xPos":0,"yPos":105.600}],"xTilt":0,"yTilt":0}} -
My guess is that you have a config-override.g file in /sys on the SD card. Delete it (you can do that from DWC) and restart the Duet.
-
M409 K"move.kinematics"
{"key":"move.kinematics","flags":"","result":{"forwardMatrix":[[1.000,0,0],[0,1.000,0],[0,0,1.000]],"inverseMatrix":[[1.000,0,0],[0,1.000,0],[0,0,1.000]],"name":"cartesian","tiltCorrection":{"correctionFactor":1.0,"lastCorrections":[],"maxCorrection":1.0,"screwPitch":0.50,"screwX":[],"screwY":[]}}} -
@Kiwi3D The second output looks correct. You should be seeing the axis home buttons again.
-
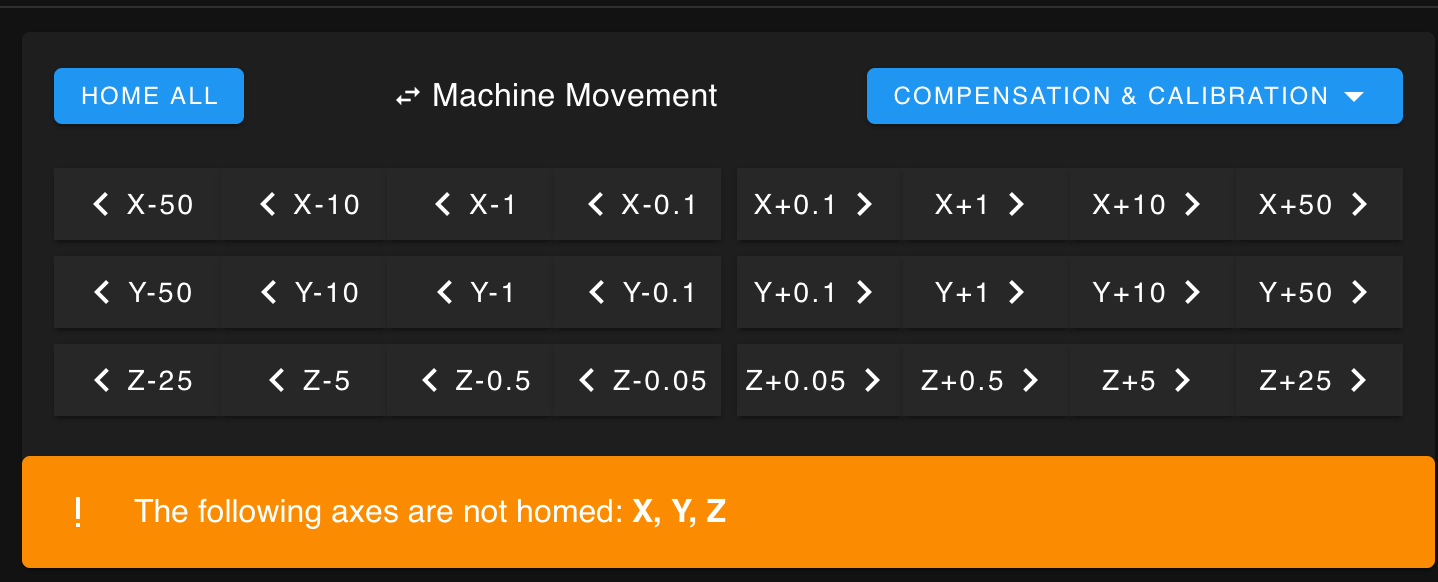
OK....so we have the right menus now
And we now have motor movement

-
Thanks @dc42 and @chrishamm
We now have a functioning homing system
Appreciate you help
and...@SputnikOC3d - thank you too dude!!!
Cheers
Ray

