Z-Axis not homing
-
So I was upgrading a Friend's old Velleman K8200 with a Duet Maestro and everything seems to be working bar one small thing. The Z-Axis won't home. Upon requesting nothing happens and eventually DWC just shows it as being at zero, any ideas? All other axes work fine and the motor and endstop were previously working fine. All endstops are low-end active-high and I have no Z-Probe. After homing when attempting to jog the Z-Axis through DWC the distance increases but nothing actually moves.
Attached is my config.
config (1).g -
Post your homeall as well.
M92 X80.00 Y80.00 Z4000.00 E420.00Are you sure that your z axis is 4000 steps per mm?
M906 X800 Y800 Z800 E800 I30Is 800ma sufficient for your Z motors?
If you send
M564 S0 H0to allow unhomed axis movement are you able to get the z motor to move by jogging buttons?Are you getting any errors in the gcode console?
How do you have the z motors wired?
-
homeall.g
No, I simply left it as default.
Again not sure, that's simply default and I'm running one identical motor so I figured it'd be close enough.
No, I got no movement.
No errors appear.
What do you mean by how are they wired? (only one motor) -
For the Z axis steps per mm you'll either need to find the previously used value or calculate it based on the lead screw specs using this formula:
Z_steps_per_mm = (motor_steps_per_rev * driver_microstep) / screw_leadFor the Z motor current, use 60-85% of the rated max of the motor. If it's too low, you may not get any movement at all. When you command movement do you hear anything from the motor itself? Change in pitch?
If you connect a different motor to the Z axis, does it work?
If you connect the current z motor to another driver, does it work?
-
also check that second z motor connection have jumpers installed, as you have only one motor and those connectors are wired in series.
-
For the calculation what is screw lead?
Okay, I'll try the current adjustment and no upon attempted movement nothing is heard or changed. (I think this value is massively off as I j checked the motors and it says 2.5A on them)
Before changing any settings I switched the Y and Z motors, and both worked, except a tiny increment in the z movement moved the Y a lot and a lot in the y-direction only moved the z a little. This makes me think it's all related to the steps per mm. -
Screw lead refers to the amount of movement produced per rotation. A very common lead screw type is TR8*8 which has a diameter of 8mm and one full rotation produces 8mm of lift. Other common sizes would be 1mm, 2mm, 4mm.
-
@Phaedrux One more thing, I have steps set to *16 with interpolation to 256. Which value do I use?
-
x16 microstepping with interpolation to 256 means the firmware uses x16 microstepping for it's calculations and step pulse generation and then the drive chips take those pulses and cho them up into x256 stepping for the motors so they are quieter and smoother.
So for your purposes, use x16.
-
So I've adjusted all the values, X and Y axes home fine but the Z axis still won't home and I'm now getting this error.
"Error: short-to-ground reported by driver(s) 2" -
Alright, now we're getting somewhere.
For the sake of completeness can you post your current config.g with your changes and describe how you're trying to move the axis?
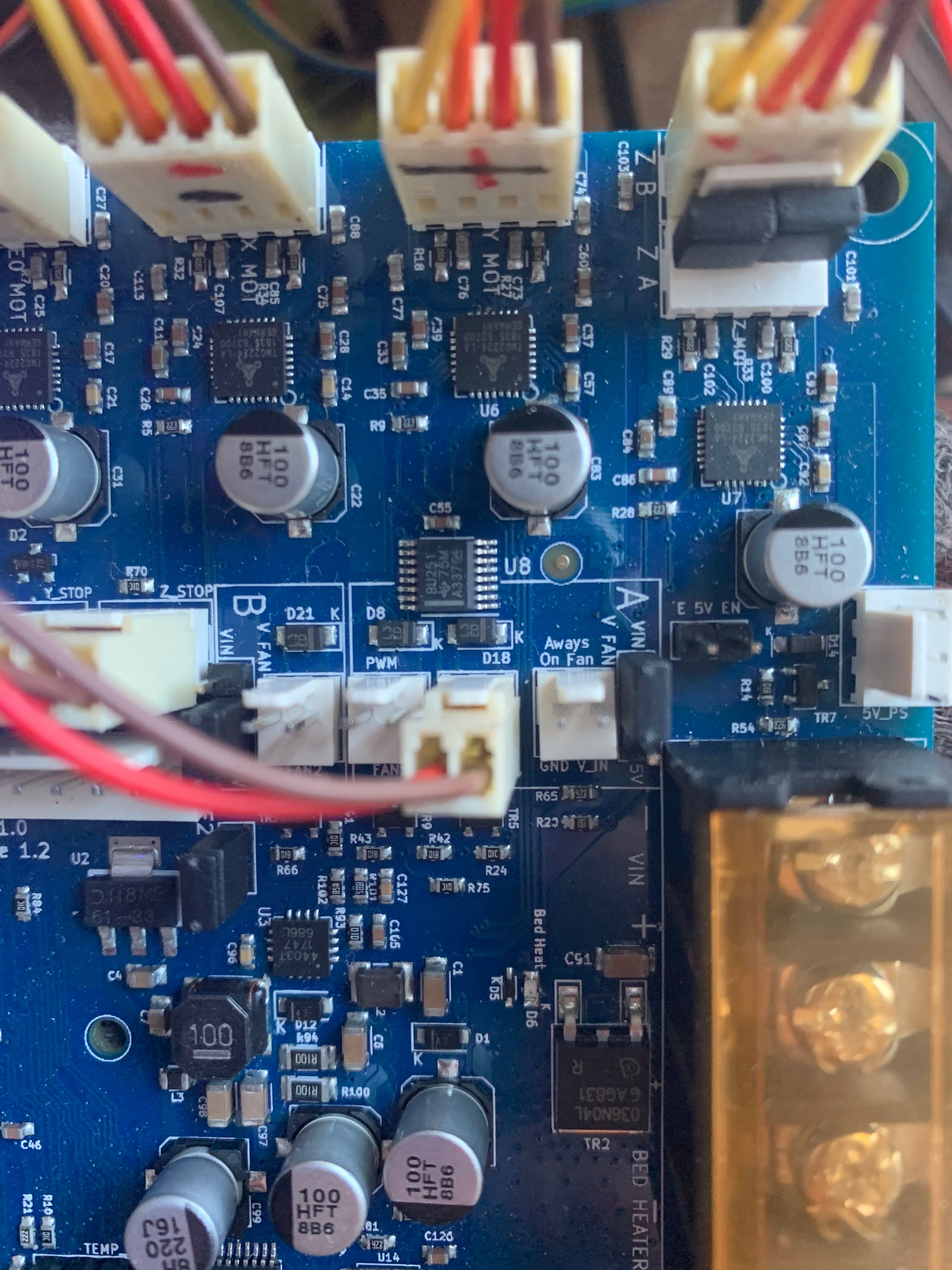
Also, can you post a photo of the Z driver chip?
-
I press the home Z button on DWC and nothing moves and I hear no noises.
(changed all motor currents to 1875mA (max is 2.5A) and Z steps per mm to 400. (200*16)/8 )

-
Swap the plug to the ZA port and put the jumpers on the ZB port and try again.
-
Same as before. Z - Axis still not moving.
-
And just to eliminate the homing files, If you send M564 S0 H0 to allow unhomed axis movement are you able to get the z motor to move by using the jogging buttons?
And does it still produce the short to ground error message?
-
Can you also send M122 in the console and post the response?
-
No I can't move the Z-axis, but x and y are fine even with the message of short to drivers from before.
m122
=== Diagnostics ===
RepRapFirmware for Duet 2 Maestro version 3.1.1 running on Duet Maestro 1.0
Board ID: 08DJM-9X66L-LG3SN-6JKDL-3S06Q-K8X6P
Used output buffers: 3 of 24 (10 max)
=== RTOS ===
Static ram: 21924
Dynamic ram: 92804 of which 52 recycled
Exception stack ram used: 392
Never used ram: 15900
Tasks: NETWORK(ready,472) HEAT(blocked,1324) MAIN(running,1996) IDLE(ready,84)
Owned mutexes:
=== Platform ===
Last reset 00:01:06 ago, cause: power up
Last software reset at 2020-05-20 19:20, reason: User, spinning module GCodes, available RAM 16096 bytes (slot 3)
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0400f000 BFAR 0xe000ed38 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 32.7, current 35.3, max 35.5
Supply voltage: min 0.0, current 15.4, max 15.7, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: standstill, read errors 0, write errors 0, ifcount 9, reads 2644, timeouts 0
Driver 1: standstill, read errors 0, write errors 0, ifcount 9, reads 2644, timeouts 0
Driver 2: short-to-ground, read errors 0, write errors 0, ifcount 9, reads 2644, timeouts 0
Driver 3: standstill, read errors 0, write errors 0, ifcount 7, reads 2646, timeouts 0
Driver 4: standstill, read errors 0, write errors 0, ifcount 6, reads 2647, timeouts 0
Driver 5: ok, read errors 0, write errors 0, ifcount 0, reads 0, timeouts 2653
Driver 6: ok, read errors 0, write errors 0, ifcount 0, reads 0, timeouts 2652
Date/time: 2020-05-20 19:32:27
Slowest loop: 10.29ms; fastest: 0.12ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Storage ===
Free file entries: 9
SD card 0 detected, interface speed: 15.0MBytes/sec
SD card longest read time 2.6ms, write time 0.0ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 168, MinFreeDm: 168, MaxWait: 26403ms
Bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves: 14, completed moves: 13, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: 3
=== AuxDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== Heat ===
Bed heaters = 0 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by HTTP
HTTP is idle in state(s) 1 8, running macro
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
Daemon is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 129.03ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8
Interface state active, link 100Mbps full duplex -
@rickypilnik said in Z-Axis not homing:
Supply voltage: min 0.0, current 15.4, max 15.7, under voltage events: 0, over voltage events: 0, power good: yes
Does 15v sound correct for your power supply?
@rickypilnik said in Z-Axis not homing:
No I can't move the Z-axis, but x and y are fine even with the message of short to drivers from before.
The short to ground message was only for driver 2, correct?
-
Yes 15V sounds correct and the message is
" Error: short-to-ground reported by driver(s) 2 " -
Alright, I think we've established that the Z driver has failed unfortunately. Please hang on while I confer with DC42 in case he has any further ideas.
When and where did you purchase your Duet 3?