IDEX Homing
-
Re: IDEX Homing Issues
Hi
I use a DUEX2 WIFI and have the same problem and with T2 the min / max X / U are different againM208 X-65 Y-35 Z0 U0 S1 ; set axis minima M208 X330 Y305 Z330 U398 S0 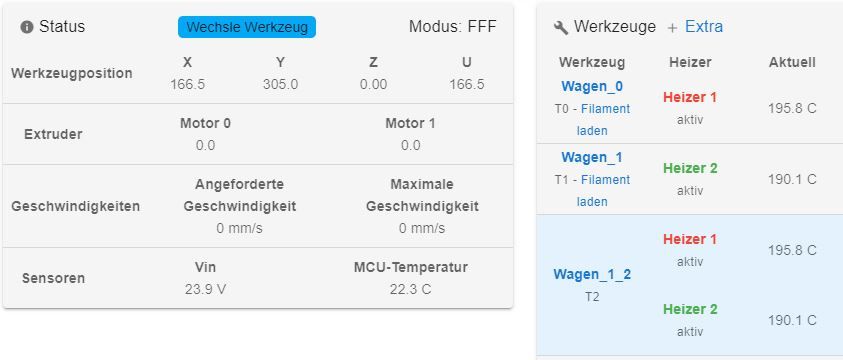

-
Please post your config.g file and all your homing files.
-
@dc42 I am sending the files tonight
am currently at work -
-
There is no solution ?
-
@Elko said in IDEX Homing:
I use a DUEX2 WIFI and have the same problem and with T2 the min / max X / U are different again
What exactly is the problem you are having?
It's normal for the reported user positions to depend on which tool is selected, because when you select a different tool, the firmware has to translate the current machine position back to user coordinates.
When you select tool 0 in your 3rd image, X maps to X so the firmware takes the current position of the X axis, applies the tool offset (which is zero for tool 0) and that is the user X position. if you have just homed X, then the machine X position is -65 (set by the M208 parameter), hence the user X position is also -65.
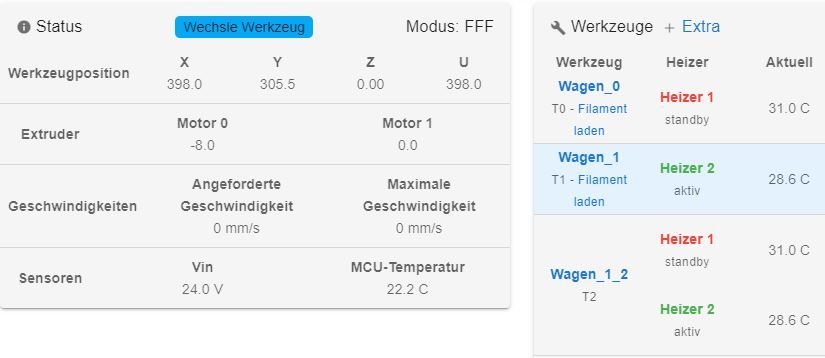
When you select tool 1 in your 2nd image, X is mapped to U. So the user X position is the U machine position after applying any U tool offset. That's why X is 398.
When you select tool 0 in your first image, X is mapped to both X and U. The difficulty here is that in this case, the X and U tools are not in compatible positions, i.e. there is no user X coordinate that maps to the current position of both X and U axes. So the firmware takes an average. If you now send a movement command such as G1 X150 then both tools will move to a position consistent with the new user X coordinate.
Duet Web Control doesn't yet have the ability to display the machine coordinates, but in RRF 3.1.x you can fetch them using this command:
m409 k"move.axes[].machinePosition"
This position will not change when you switch between tools, assuming no movement commands in your tool change files.
HTH David
-
ok i have to look at this again i don't understand it at the moment
THANK YOU -
Ok, I understand it now
0X 0Y 0U are now in the middle of the bed
IT WORKS OUT