Robotic kinematics
-
I have a 3d printer I took it for granted !!some pieces for my scara are created with 3d printing !
-
@tony73 I only ask because I have an idea to use 3D printed gears, and one needs a printer already to create it. But I'll explain in a few days.
-
ok! I look forward to hearing from you !
-
@JoergS5
good morning ! how is work on the robot going on? -
@tony73 hello, my first try was too flexible, I am currently building version 2. You'll see it in a few days.
-
@JoergS5
OK, see you soon! -
This post is deleted! -
@dc42 I have two short questions and hope you can easily answer them:
The M208 XYZ, are they cartesian coordinates, and when using U it is meant as a second X? For rotational actuators, I would use the result of the kinematics world coordinates for the M208 values, not the angles? Do I understand this correctly?
I have to inform the kinematics in advance before the G0/G1 move starts, what the complete movement will be. I added a seperate method for this in the kinematics. Where shall I add the call? (DDA/Move/...Init/Spin?) and are there additional parts where I have to add it (mesh compensation eg).
-
It's entirely up to you what you use the U axis for. In the CNC world, conventionally UVW behave like a second XYZ system, and ABC are rotational axes. But RRF doesn't require that.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I meant are M208 values cartesian coordinates or stepper positions?
-
@JoergS5 said in Robotic kinematics:
@dc42 I meant are M208 values cartesian coordinates or stepper positions?
They are in whatever units your kinematics assumes for U parameters in G1 commands.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 ok thanks, I try to use it correctly.
-
good morning ! I took the two files with the latest changes FiveAxisRobotKinematics.h and FiveAxisRobotKinematics.cpp I put them in rrf 3.1.0 as I always did, I tried to in eclipse to recompile the .bin gives me this error,
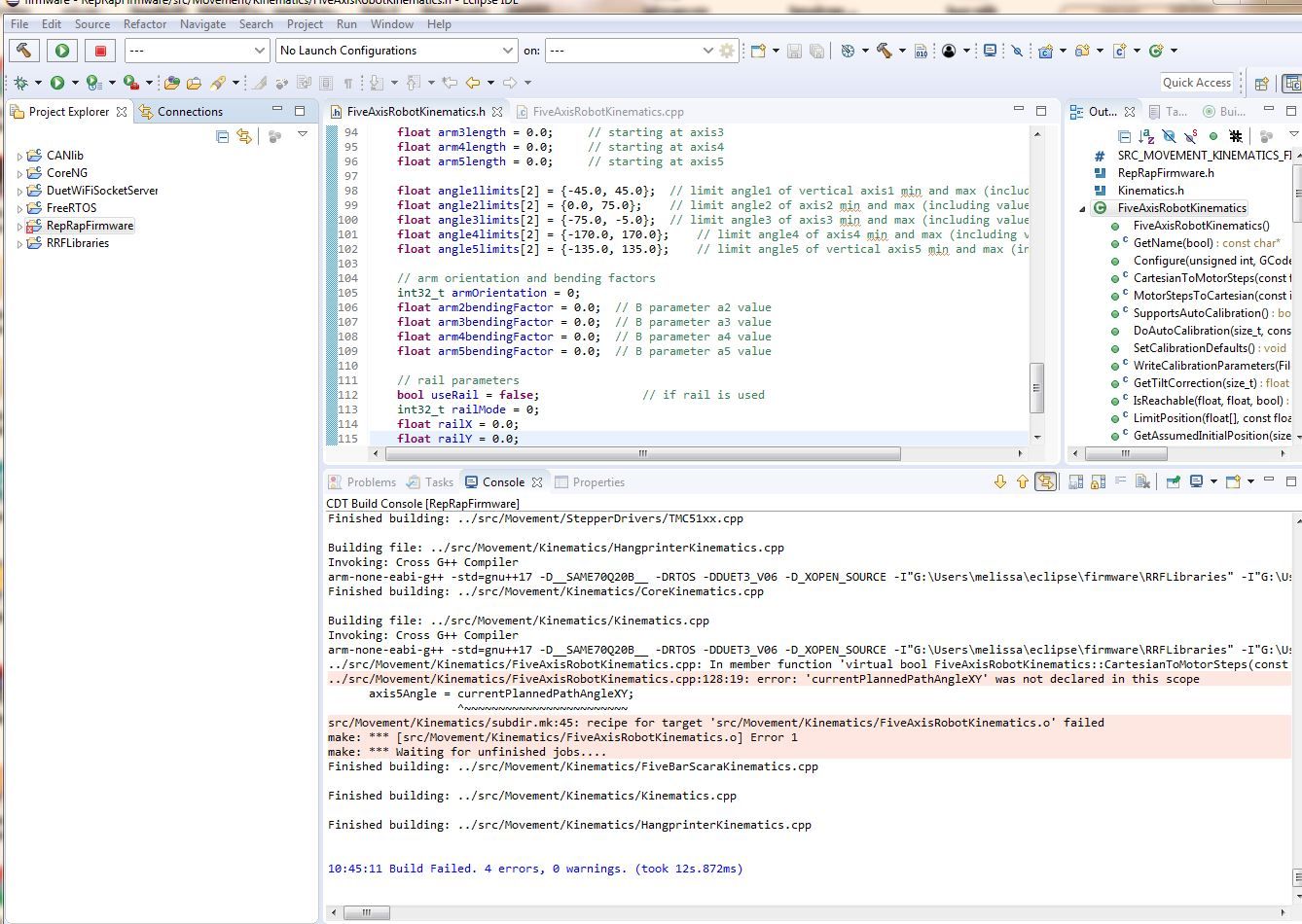
could you help me ? I don't know where I'm wrong!

-
@tony73 you're right, I missed checking it in into github. I'll do this in a minute. The variables are a prepration to support P3 (hotend in the direction of the movement) and a new P4.
Sorry that I overlooked it.
-
OK! eclipse firmware reloaded works! I would like to start building a robot that looks like this
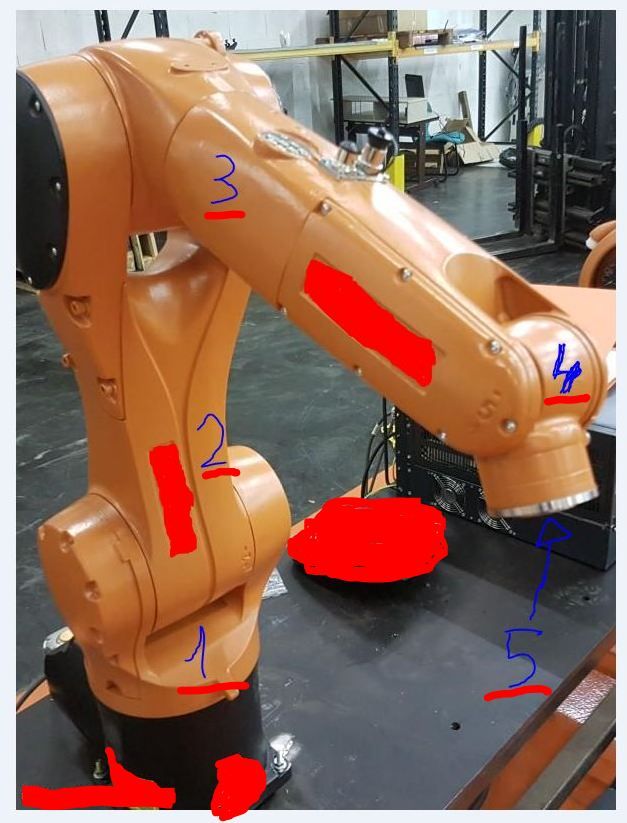
with example link 1 /150mm, link 2/ 200mm, link 3/ 200mm, link 4/ 100mm, link 5/ 80mm
the (link 4 could be 100mm? considering that I don't know if link 2 can go to less than 0 degrees (type arm 2 max 75 degrees min -45 degrees? and could you say reduction ratio would serve on the basis of these arms, for the 5 engines?maybe I made a wrong speech!
if link 1 is 150mm, I can make link 4 of 100mm that is 50mm less than link 1, can there be a problem or can it be done? can create problems at link 2 for min angle 0? -
@tony73 I think you confuse some of the distances, What you mark as link 1 distance has no meaning. Only how much it can rotate is important.
=> to answer your question, different axis lengths are no problem. Longer will probebly be more stable. I will use between 100 and 200 also.Link 2 min angle 0 is no problem. You must calibrate the angle at a different angle (eg 90 degree).
Your question according reduction ratio: which ratio do you plan?
At the 5 you must assemble something horizontal to hold a hotend if you want to use it for 3d printing.
The robot as such looks very stiff and will be precise (if the ratio is ok) imho. In axis 5 could be a harmonic drive. A planetoid gear could have backlash, but you could run it in P0 mode.Axis 1 is very important to be precise (exactly horizontal rotation eg), you should consider making the rotating plate as big/good/stiff as possible.
-
This post is deleted! -
@JoergS5
ok! I take note of all the advice! and thank you for your help! if these were the lengths of the robot arms ((X0.0: 0.0 Y0.0: 0.0 Z100.0 L200.0: 200.0: 100.0: 80.0)) what reduction ratio would you use so that the 5 motors have excellent precision?about the second robot you are building how long do you need to finish it?
-
@tony73 I don't exactly know the best ratio, the commercial robots often have 1:30 for every axis. My approach will be to calculate mathematically which is the best ratio:
high ratio means higher precision and more torque, but slower. So there will be an optimal ratio for the desired speed. Regarding the maximal extruder speed, the robot has a maximum speed. More speed (= low ratio) is not necessary and would result in lower precision. High ratio would be slow. The arm lengths are also important.To calculate is on my long todo list...
-
@tony73 said in Robotic kinematics:
about the second robot you are building how long do you need to finish it?
My recent firmware changes are the result of this building. The axis5offset (Xo, Yo) is to ease construction of axis 4 and 5. The main problem is axis 1. A few days left.